一种基于PMU测量的水轮机调速器系统传递函数估计方法与流程
- 国知局
- 2024-07-31 22:42:58
本发明涉及水轮机调速系统的控制方法,尤其涉及基于pmu测量的水轮机调速器系统传递函数估计方法。
背景技术:
1、在电力系统中,水轮机调速器系统是关键的调节设备,其动态特性直接影响到电力系统的频率稳定性。特别是在以水力发电为主导的地区,水轮机调速器系统的性能尤为重要。然而,现有的水轮机调速器系统传递函数估计方法往往存在精度不足、操作复杂等问题,难以满足现代电力系统的需求。
2、因此,本发明提出了一种基于pmu测量的水轮机调速器系统传递函数估计方法及系统,旨在通过pmu测量数据,准确估计水轮机调速器系统的传递函数,提高电力系统的频率稳定性。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种基于pmu测量的水轮机调速器系统传递函数估计方法,旨在解决现有传递函数估计存在的技术问题。
2、本发明解决其技术问题是采用以下技术方案实现的:
3、依据本发明提供的一种基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,包括:
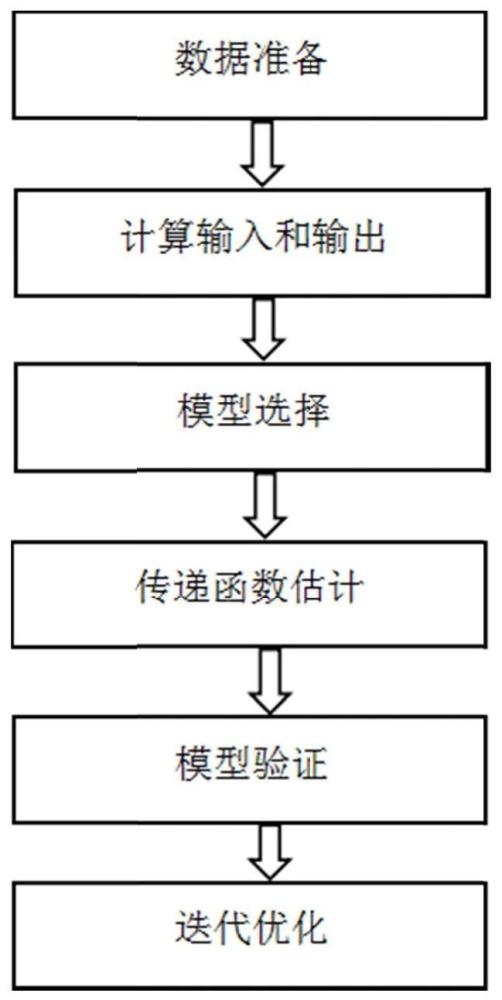
4、步骤一:数据准备;在一段时间内实时连续测量发电机的电网频率和有功功率,在此期间,不得对设定点的有功功率设定值进行任何调整,以便有功功率的变化完全由电网频率驱动;
5、步骤二:计算输入和输出;由于设定点的有功功率设定值是未知的,首先,根据测量的有功功率和电网频率来估计该设定值,其次,识别出传递函数系统,最后,根据输入和最近的估计模型来模拟输出,通过比较测量和模拟的功率输出,逐渐调整该设定值,直到它与实际设定点相匹配;
6、步骤三:模型选择;对于arx模型,需要设置的参数为阶数n和m,从低阶开始逐渐增加阶数,直到估计值收敛;对于srivc模型,需要设置的参数为极点和零点,与arx模型的情况类似,极点和零点的设置从低阶开始逐渐增加阶数,直到估计值收敛;
7、步骤四:传递函数估计;使用matlab的系统辨识工具箱来实现,系统辨识工具箱提供的辨识函数为arx(),其使用方法是:如果输入信号的列向量为u,输出信号的列向量为y,并选定了系统的分子多项式阶次m-1,分母多项式的阶次n及系统的纯滞后d,则可以通过下面的指令辨识出系统的数学模型:t=arx([y,u],[n,m,d]);
8、步骤五:模型验证;首先,使用测量得到的输入来激励估计模型,以产生模拟输出;然后,将该输出与测量的有功功率进行比较;为了评估模型的估计效果,拟合标准被定义为:
9、
10、其中,和y(t)分别表示模拟值输出和测量值输出;
11、步骤六:迭代优化;从低阶到高阶逐渐增加阶数,拟合变得越来越好,直到系统得到最佳估计,此时终止识别过程。
12、优选地,为了使arx和srivc模型能正确估计系统,应去除每个输入和输出信号的均值。
13、优选地,所述的步骤三中,初始阶数设置为n=10,m=10。
14、优选地,所述的步骤四中,还可以使用contsid和captain工具箱进行传递函数的估计。
15、优选地,所述的步骤五中,在matlab中使用命令compare来完成输出与测量的有功功率的比较。
16、与传统的传递函数估计方法相比,本发明具有以下优点:
17、1.通过pmu测量数据,能够实时获取水轮机调速器系统的运行状态,提高了传递函数估计的准确性和实时性;
18、2.利用先进的系统识别方法,能够准确估计水轮机调速器系统的传递函数,为电力系统的频率稳定性提供了有力保障;
19、3.本发明的方法及系统操作简便,易于实施,具有广泛的应用前景。
技术特征:1.一种基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,包括:
2.根据权利要求1所述的基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,在步骤三中,arx和srivc模型去除了每个输入和输出信号的均值。
3.根据权利要求1所述的基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,在步骤三中,初始阶数设置为n=10,m=10。
4.根据权利要求1所述的基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,在步骤四中,所述工具箱为matlab的系统辨识工具箱、contsid工具箱或captain工具箱。
5.根据权利要求4所述的基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,在步骤五中,使用matlab的系统辨识工具箱中compare命令来完成输出与测量的有功功率的比较。
6.根据权利要求4所述的基于pmu测量的水轮机调速器系统传递函数估计方法,其特征在于,包括:在步骤四中,使用matlab的系统辨识工具箱来提供辨识函数arx()的方法包括:如果输入信号的列向量为u,输出信号的列向量为y,并选定了系统的分子多项式阶次m-1,分母多项式的阶次n及系统的纯滞后d,则可以通过下面的指令辨识出系统的数学模型:t=arx([y,u],[n,m,d])。
技术总结一种基于PMU测量的水轮机调速器系统传递函数估计方法,解决了水力发电中频率质量难以控制的问题。该方法包括:步骤一:数据准备;步骤二:计算输入和输出;步骤三:模型选择;步骤四:传递函数估计;步骤五:模型验证;步骤六:迭代优化。本发明通过PMU测量数据,能够实时获取水轮机调速器系统的运行状态,提高了传递函数估计的准确性和实时性。技术研发人员:王本红,王瑞清,朱斌,赵伟,余志强,张鹏,翟玉杰,严玉明,陈浩,周立成,吴礼贵受保护的技术使用者:中国长江电力股份有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/194250.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表