基于全局特征的三维CAD模型检索方法、设备及介质与流程
- 国知局
- 2024-07-31 22:50:46
本说明书涉及模型检索,尤其涉及一种基于全局特征的三维cad模型检索方法、设备及介质。
背景技术:
1、制造业客户在其发展过程中常常积累了高达百万甚至千万的产品模型数据,而工程技术人员和客户很难以用文字对cad模型的样式和尺寸进行准确的描述。当cad项目处理过程中技术人员需要对已经创建的三维cad模型进行复用时,往往需要依赖个人工作经验和简单的分类条件在庞大的图纸库中查找近似或重复的模具和型材,这不仅会耗费大量的人力和时间,而且查询结果往往不全面、不精准,查询准确率和效率都有待提高。而如果放弃在现存的数据中进行搜索,选择重新创建或近似设计,又会导致技术人员工作量的激增,也会由于重复模型过多导致数据规模越来越庞大和混乱,在erp/plm中耗费大量时间和成本用于新物料的维护。因此,cad模型检索一直是制造业客户降低设计成本的刚需。
2、传统的三维模型检索方法中一般通过读取模型文件构建对应的图,然后基于图匹配算法对模型是否相似进行判断。这类检索方法基于无损信息判断模型是否相似,判断准确性较高。但是,通过读取文件构建三维模型对应图结构耗时较长,当模型复杂度或模型库数据量增加时,检索时长呈指数级增长。而当前基于深度学习网络进行检索时一般仅考虑模型轮廓特征进行相似性检索,然而这种检索方式不适用于加工特征复杂的零件模型,在进行检索相似模型时,不仅准确性差且效率低。
技术实现思路
1、为了解决上述技术问题,本说明书一个或多个实施例提供了一种基于全局特征的三维cad模型检索方法、设备及介质。
2、本说明书一个或多个实施例采用下述技术方案:
3、本说明书一个或多个实施例提供一种基于全局特征的三维cad模型检索方法,方法包括:
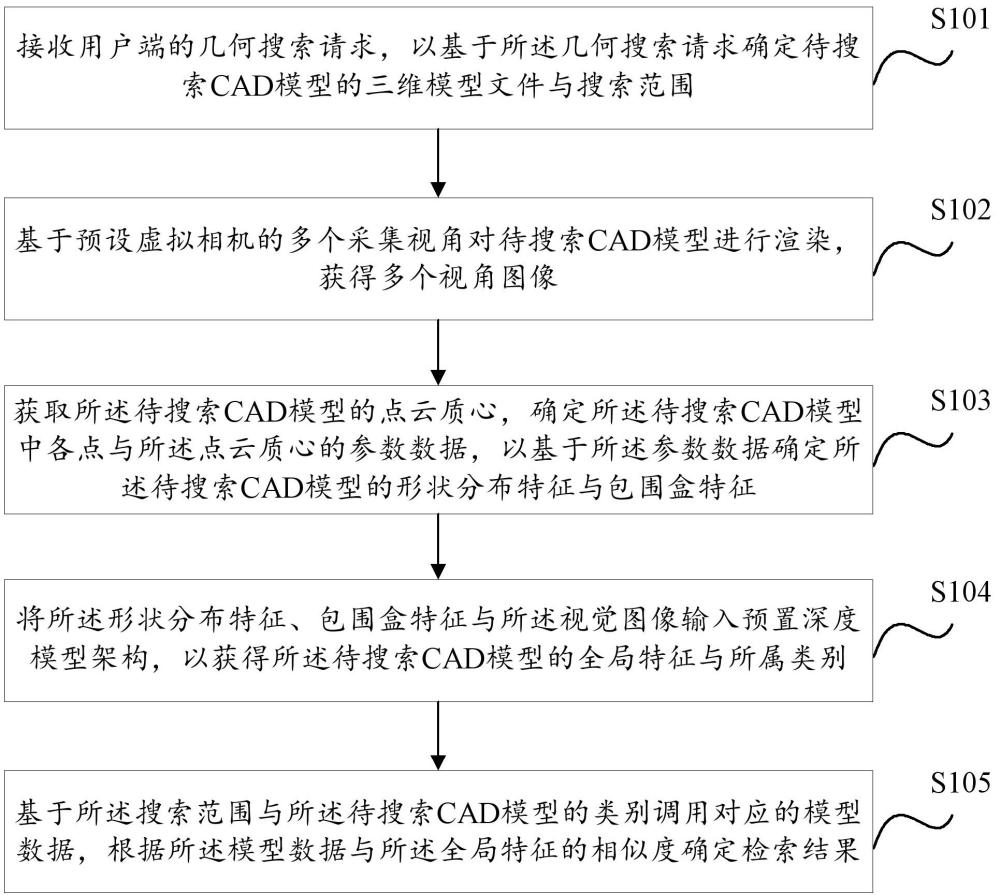
4、接收用户端的几何搜索请求,以基于所述几何搜索请求确定待搜索cad模型的三维模型文件与搜索范围;
5、基于预设虚拟相机的多个采集视角对待搜索cad模型进行渲染,获得多个视角图像;
6、获取所述待搜索cad模型的点云质心,确定所述待搜索cad模型中各点与所述点云质心的参数数据,以基于所述参数数据确定所述待搜索cad模型的形状分布特征与包围盒特征;
7、将所述形状分布特征、包围盒特征与所述视角图像输入预置深度模型架构,以获得所述待搜索cad模型的全局特征与所属类别;
8、基于所述搜索范围与所述待搜索cad模型的所属类别调用对应的模型数据,根据所述模型数据与所述全局特征的相似度确定检索结果。
9、可选地,在本说明书一个或多个实施例中,将所述形状分布特征、包围盒特征与所述视角图像输入预置深度模型架构,以获得所述待搜索cad模型的全局特征与所属类别之前,所述方法还包括:
10、基于所述待搜索cad模型所对应的行业标准确定预置标准件数据集内各标准件数据所对应的实际分类结果;其中,所述预置标准件数据包括:标准件视角图像、标准件形状分布特征、标准件包围盒特征;
11、基于预设划分比例对所述预置标准件数据集进行划分获得训练数据与测试数据;其中,所述训练数据与所述测试数据存储于不同的预置文件中;
12、基于预设程序调用所述训练数据的预置文件,以将所述预置文件内的训练数据输入初始深度模型架构,以基于所述初始深度模型架构的预置卷积模块对所述训练数据进行卷积处理获得所述训练数据所对应的特征矢量;
13、将所述特征矢量属于所述初始深度模型架构的全局自注意力机制编码器,进行特征提取,获得所述训练数据所对应的训练全局特征;
14、将所述训练全局特征输入所述初始深度模型架构的多层感知机模块,以通过所述多层感知机模块对所述训练全局特征进行分类,确定所述训练数据所对应的分类结果;其中,所述多层感知机模块由两个具有gelu非线性的层构成;
15、基于所述分类结果与所述训练数据所对应的实际分类结果,确定所述初始深度模型架构的损失函数,以基于所述损失函数进行反向传播更新所述初始深度模型架构的模型参数,迭代更新所述模型参数获得训练后的深度模型架构;
16、基于所述测试数据对所述训练后的深度模型架构进行评价,以获得符合要求的预置深度模型架构与所述预置深度模型架构的模型参数。
17、可选地,在本说明书一个或多个实施例中,所述接收用户端的几何搜索请求,以基于所述几何搜索请求确定待搜索cad模型的三维模型文件与搜索范围之前,所述方法还包括:
18、确定预置web框架的主函数目录,并获取预置深度模型架构所对应的模型参数,以将所述模型参数与预置搜索功能所对应的程序代码,加载到所述预置web框架的主函数目录内获得初始几何搜索服务框架;其中,所述预置web框架为fastapi框架;
19、确定所述初始几何搜索服务框架所对应的客户端作为应用程序对象,并确定预置uvicorn服务器为运行模块;
20、将所述应用程序对象与所述运行模块基于对应标识加载到所述初始几何搜索服务框架,实现所述初始几何搜索服务框架与所述预置uvicorn服务器的集成,获几何搜索服务框架;
21、基于预设打包工具对所述几何搜索服务框架进行打包获得几何搜索服务包,并对所述几何搜索服务包在用户端进行部署,以使用户端运行几何搜索服务获得几何搜索界面,并监控所述几何搜索界面获得用户端的几何搜索请求。
22、可选地,在本说明书一个或多个实施例中,基于预设虚拟相机的多个采集视角对待搜索cad模型进行渲染,获得多个视角图像,具体包括:
23、确定所述待搜索cad模型的顶点位置,以将视野内包含各所述顶点位置的区域作为预设虚拟相机的布设位置;
24、依次计算各虚拟相机与所述顶点之间的向量,以基于所述向量调整所述预设虚拟相机的确定视角方向;其中,所述视角方向的数量与所述顶点数量相对应;
25、基于所述视角方向对所述待搜索cad模型进行渲染,获得多个视角图像。
26、可选地,在本说明书一个或多个实施例中,获取所述待搜索cad模型的点云质心,确定所述待搜索cad模型中各点与所述点云质心的参数数据,以基于所述参数数据确定所述待搜索cad模型的形状分布特征与包围盒特征,具体包括:
27、基于自适应点云平均距离计算确定待搜索cad模型的点云质心,以确定所述待搜索cad模型中各点到所述点云质心的参数数据;其中,所述参数数据包括:各点到所述点云质心的距离、各点到所述点云质心的角度;
28、分别确定各点到所述点云质心的距离所对应的距离分布直方图,以及各点到所述点云质心的角度所对应的角度分布直方图;
29、基于所述距离分布直方图与所述角度分布直方图确定所述待搜索cad模型的距离分布数据与角度分布数据,并对所述距离分布数据与所述角度分布数据进行标准化处理,获得处理后的距离分布数据与处理后的角度分布数据;
30、将所述距离分布数据与所述角度分布数据依次连接为一维数组,获得待搜索cad模型的形状分布特征;
31、基于所述距离分布分数与所述角度分布数据确定预设角度所对应的距离最大点,以基于所述距离最大点构成所述待搜索cad模型的包围盒,并获得所述包围盒的数据特征作为包围盒特征。
32、可选地,在本说明书一个或多个实施例中,获取所述待搜索cad模型的点云质心,具体包括:
33、获取所述待搜索cad模型的点云数据,以计算所述待搜索cad模型的平均点云距离;
34、基于所述平均点云距离与预置平均点云距离阈,确定所述待搜索cad模型的多个预选质心点;
35、基于所述待搜索cad模型的点云数据与各所述预选质心点之间的距离,确定各所述预选质心点所对应的邻域点云数据;
36、根据所述邻域点云数据确定各所述预选质心点所对应的邻域点云平均距离,基于预设点云密度与所述邻域点云平均距离对所述预选质心点进行筛选,确定所述待搜索cad模型的点云质心。
37、可选地,在本说明书一个或多个实施例中,基于所述搜索范围与所述待搜索cad模型的所属类别调用对应的模型数据,根据所述模型数据与所述全局特征的相似度确定检索结果,具体包括:
38、在所述搜索范围内调用预置mongodb数据库内与所述待搜索cad模型的所属类别相对应的模型数据;
39、获取所述模型数据所对应的历史全局特征所对应的历史全局特征相邻与所述全局特征所对应的全局特征向量之间夹角的余弦值,以基于所述余弦值确定所述模型数据与所述全局特征之间的特征相似度;
40、基于所述历史全局特征与所述全局特征的重叠占比,确定所述模型数据与所述全局特征之间的组成相似度;
41、基于所述特征相似度与所述组成相似度的加权确定所述模型数据与所述全局特征的相似度,并基于所述相似度确定预设数量的目标模型作为检索结果。
42、可选地,在本说明书一个或多个实施例中,基于所述搜索范围与所述待搜索cad模型的所属类别调用对应的模型数据,根据所述模型数据与所述全局特征的相似度确定检索结果之后,所述方法还包括:
43、基于所述相似度确定所述目标模型的显示优先权;
44、基于所述目标模型的模型id查询所述目标模型的详细信息,并根据所述显示优先权确定各所述详细信息的显示位置;
45、根据所述显示位置将所述详细信息传输到用户前端进行显示。
46、本说明书一个或多个实施例提供一种基于全局特征的三维cad模型检索设备,设备包括:
47、至少一个处理器;以及,
48、与所述至少一个处理器通信连接的存储器;其中,
49、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:执行上述任一所述的方法。
50、本说明书一个或多个实施例提供的一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:能够执行上述任一所述的方法。
51、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
52、获取多个不同视角下的图像,从而更全面地捕捉模型的三维特征,这样可以避免传统方法中单一角度的视觉特征分析容易导致三维特征丢失或表达不精确的问题,提高了待搜索cad模型视觉特征获取的完整性和准确性。此外,通过获取几何特征实现了对于多角度视角图像中缺失三维结构特征的弥补,将多模态信息输入深度模型进行训练,可以利用深度学习的强大表示能力和学习能力,挖掘潜在的特征表示,从而提高cad模型分类的准确性。通过获取用户根据需要设定待搜索cad模型的搜索范围和其他参数,能够实现搜索范围的缩小,而在搜索范围内基于所属类别进行进一步的模型数据筛选,能够进一步实现搜素范围的缩小,避免了在整个数据库中进行大范围遍历检索导致的检索时间长成本高的问题,且提高了检索的准确性和效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194966.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。