基于粘滞阻尼系数计算模型的齿轮传动优化方法及系统
- 国知局
- 2024-07-31 22:52:12
本发明涉及齿轮动力学领域,特别涉及基于粘滞阻尼系数计算模型的齿轮传动优化方法及系统。
背景技术:
1、由于不同机械部件之间的装配间隙,多体系统中经常发生碰撞-接触现象。建立碰撞体在碰撞-接触过程中接触力的精确计算模型是研究系统振动和噪声的基础。阻尼项是接触力计算模型的重要组成部分,用于模拟碰撞系统在碰撞-接触过程中的能量耗散。
2、齿轮传动系统是机械设备中应用最广泛的动力传递装置,其通过轮齿啮合将来自电机的动力和运动传递至负载设备。同时,为了防止系统运行过程中的齿轮卡死和保证良好的润滑效果,齿轮安装过程中会预留一定的齿侧间隙。然而,齿侧齿隙的存在也可能导致齿轮传动系统出现脱啮合,如图1a中齿对#1和#2的未接触。在主动齿轮力矩tp和从动齿轮力矩tg的作用下,齿轮传动系统会从脱啮合重新接触,如图1b中齿对#1和#2的接触。在齿轮传动系统从脱啮合变成接触的过程中,齿轮传动系统出现冲击碰撞,并且系统的振动和噪声随之增大。
3、因此,需要提供基于粘滞阻尼系数计算模型的齿轮传动优化方法及系统,用于减少齿轮传动系统的脱啮合。
技术实现思路
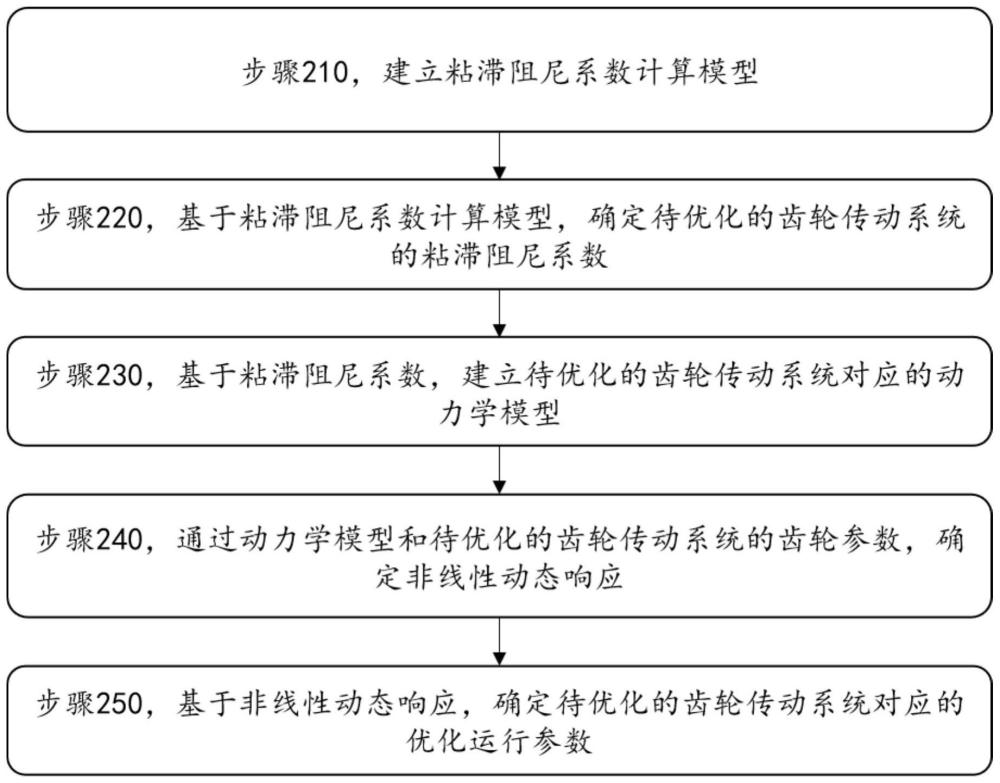
1、本发明提供基于粘滞阻尼系数计算模型的齿轮传动优化方法,包括:建立粘滞阻尼系数计算模型;基于所述粘滞阻尼系数计算模型,确定待优化的齿轮传动系统的粘滞阻尼系数;基于所述粘滞阻尼系数,建立所述待优化的齿轮传动系统对应的动力学模型通过所述动力学模型和所述待优化的齿轮传动系统的齿轮参数,确定非线性动态响应;基于所述非线性动态响应,确定所述待优化的齿轮传动系统对应的优化运行参数。
2、进一步地,所述基于所述粘滞阻尼系数计算模型,确定待优化的齿轮传动系统的粘滞阻尼系数,包括:s11、建立关于系统粘滞阻尼系数的函数;s12、初始化最大粘滞阻尼系数及最小粘滞阻尼系数;s13、基于所述最大粘滞阻尼系数及最小粘滞阻尼系数,确定当前粘滞阻尼系数;s14、基于所述关于系统粘滞阻尼系数的函数,判断所述当前粘滞阻尼系数是否满足第一预设条件,若是,执行s16,若否,执行s15;s15、基于所述当前粘滞阻尼系数调整所述最大粘滞阻尼系数或最小粘滞阻尼系数,执行s13;s16、将所述当前粘滞阻尼系数作为所述待优化的齿轮传动系统的粘滞阻尼系数。
3、进一步地,基于所述关于系统粘滞阻尼系数的函数,判断所述当前粘滞阻尼系数是否满足第一预设条件,包括:构建系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式;基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对位移;建立关于粘滞阻尼系数的目标函数;基于所述粘滞阻尼系数的目标函数,判断所述当前粘滞阻尼系数是否满足第一预设条件。
4、进一步地,所述关于粘滞阻尼系数的目标函数为:
5、
6、其中,epre为恢复系数,n为脱啮合至接触过程中发生接触的轮齿对数,δ-代表系统刚发生接触时沿作用线的相对位移;δmax代表系统接触过程中沿作用线的最大相对位移;δ+代表系统接触结束时沿作用线的相对位移;代表了系统沿作用线上的相对速度。ki为系统脱啮合-接触过程中的系统刚度;f(δ)代表了系统的间隙函数;ni代表了第i对轮齿的齿形指数。
7、进一步地,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对位移,包括:s21、初始化最大相对位移的最大阈值和最大相对位移的最小阈值;s22、基于所述最大相对位移的最大阈值和最大相对位移的最小阈值,确定当前最大相对位移;s23、基于所述当前最大相对位移,计算压缩阶段的等效速度;s24、建立关于最大相对位移的目标函数,判断所述当前最大相对位移是否满足第二预设条件,若是,执行s26,若否,执行s25;s25、基于所述当前最大相对位移调整所述最大相对位移的最大阈值或最大相对位移的最小阈值,执行s22;s26、将所述当前最大相对位移作为所述当前粘滞阻尼系数对应的最大相对位移。
8、进一步地,所述关于最大相对位移的目标函数为:
9、
10、其中,δmax为最大相对位移,为齿轮传动系统沿作用线的初始碰撞速度,为压缩阶段的相对速度,m为齿轮传动系统沿作用线的等效质量,fe为等效外部力,为压缩阶段的等效速度。
11、进一步地,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对位移,包括:s31、构建关于系统接触结束时沿作用线的相对位移的目标函数;s32、确定当前系统接触结束时沿作用线的相对位移;s33、基于所述关于系统接触结束时沿作用线的相对位移的目标函数,判断所述当前系统接触结束时沿作用线的相对位移是否满足第三预设条件;s34、若是,执行s36,若否,执行s35;s35、调整所述当前系统接触结束时沿作用线的相对位移;s36、将所述当前系统接触结束时沿作用线的相对位移作为所述当前粘滞阻尼系数对应的系统接触结束时沿作用线的相对位移。
12、进一步地,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对速度,包括:s41、构建关于相对速度的目标函数;s42、确定当前相对速度;s43、基于所述关于相对速度的目标函数,判断所述当前相对速度是否满足第四预设条件;s44、若是,执行s46,若否,执行s45;s45、调整所述当前相对速度;s46、将所述当前相对速度作为所述当前粘滞阻尼系数对应的相对速度。
13、进一步地,所述关于系统接触结束时沿作用线的相对位移的目标函数为:
14、
15、其中,为系统在恢复阶段的等效速度;
16、所述关于相对速度的目标函数为:
17、
18、本发明提供基于粘滞阻尼系数计算模型的齿轮传动优化系统,应用基于粘滞阻尼系数计算模型的齿轮传动优化方法,包括:粘滞阻尼系数计算模块,用于建立粘滞阻尼系数计算模型,并基于所述粘滞阻尼系数计算模型,确定待优化的齿轮传动系统的粘滞阻尼系数;动力学模型建立模块,用于基于所述粘滞阻尼系数,建立所述待优化的齿轮传动系统对应的动力学模型;响应预测模块,用于通过所述动力学模型和所述待优化的齿轮传动系统的齿轮参数,确定非线性动态响应;参数优化模块,用于基于所述非线性动态响应,确定所述待优化的齿轮传动系统对应的优化运行参数。
技术特征:1.基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,包括:
2.根据权利要求1所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,所述基于所述粘滞阻尼系数计算模型,确定待优化的齿轮传动系统的粘滞阻尼系数,包括:
3.根据权利要求2所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,基于所述关于系统粘滞阻尼系数的函数,判断所述当前粘滞阻尼系数是否满足第一预设条件,包括:
4.根据权利要求3所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,所述关于粘滞阻尼系数的目标函数为:
5.根据权利要求4所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对位移,包括:
6.根据权利要求5所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,所述关于最大相对位移的目标函数为:
7.根据权利要求6所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对位移,包括:
8.根据权利要求7所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,基于所述当前粘滞阻尼系数和所述系统接触过程中最大相对位移、相对速度和系统接触结束时沿作用线的相对位移的计算公式,确定所述当前粘滞阻尼系数对应的最大相对位移、相对速度和系统接触结束时沿作用线的相对速度,包括:
9.根据权利要求8所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,所述关于系统接触结束时沿作用线的相对位移的目标函数为:
10.基于粘滞阻尼系数计算模型的齿轮传动优化系统,应用权利要求1-9中任意一项所述的基于粘滞阻尼系数计算模型的齿轮传动优化方法,其特征在于,包括:
技术总结本发明提供基于粘滞阻尼系数计算模型的齿轮传动优化方法及系统,涉及齿轮动力学领域,该方法包括:建立粘滞阻尼系数计算模型;基于粘滞阻尼系数计算模型,确定待优化的齿轮传动系统的粘滞阻尼系数;基于粘滞阻尼系数,建立待优化的齿轮传动系统对应的动力学模型;通过动力学模型和待优化的齿轮传动系统的齿轮参数,确定非线性动态响应;基于非线性动态响应,确定待优化的齿轮传动系统对应的优化运行参数,具有减少齿轮传动系统的脱啮合的优点。技术研发人员:陈再刚,李正发,杜明刚,王利明受保护的技术使用者:西南交通大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195088.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。