一种基于视觉的车辆车速预测及连续定位方法与流程
- 国知局
- 2024-07-31 22:52:19
本发明属于车辆跟踪定位领域,具体涉及一种基于视觉的车辆车速预测及连续定位方法。
背景技术:
1、目前,机动车辆的使用已经成为交通运输的重要手段之一。随着机动车辆的投入使用量不断增大,如何有效实现对机动车辆的管理和统计,对于道路交通安全和管理有着重要作用。而对机动车辆速度的检测则是行车辆管理的一个重要方面。
2、目前道路上主要采用雷达、激光或者感应线圈的方式来检测车速。以上方法都已发展得较为成熟,但在使用过程中存在一定的局限性。基于地感线圈的测速方法具有简单快速获得车辆速度的优点,但地感线圈在受到长期挤压后容易损坏,若更换则需要挖开路面重新埋设,维护成本高;基于雷达的测速方法对于多个被检测目标车辆同时出现在检测区域时容易导致检测错误;基于激光的测速方法对驾驶员的眼睛具有较大危害,同时该方法也不能对多车道多车辆目标进行测速,设备成本投入高。
3、现有技术一种基于双目摄像头的实时车速检测方法及系统(公告号:cn104155470b),步骤如下:1)提取进入双目摄像头视角范围的矩形框和质心坐标,并且对目标车辆进行跟踪;2)通过对目标车辆的跟踪,记录车辆进入和离开双目摄像头视角范围的位置以及时间;3)预先建立双目摄像头视差深度表和双目摄像头各深度处视点距离光轴的垂直长度与其所成像的像素数比例关系表;4)获取车辆进入双目摄像视角范围视点以及离开双目摄像视角范围视点的视差,得出车辆进入和离开位置视点距离光轴的垂直距离长度;5)计算出车辆进入和离开位置视点之间的行驶距离,根据车辆的行驶距离和时间得出车辆的车速。具有速度测量精度高以及能够实现多车道多车辆目标同时测速的优点。
4、但是采用双目摄像头检测车速的方式,需要较多的额外标定数据,运算复杂度较高,且难以对摄像头下的车辆进行定位。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于视觉的车辆车速预测及连续定位方法。本发明旨在解决现有车速检测方法复杂度高,且无法对车辆进行定位的问题。
2、为达到上述目的,本发明提供了一种基于视觉的车辆车速预测及连续定位方法,包括以下步骤:
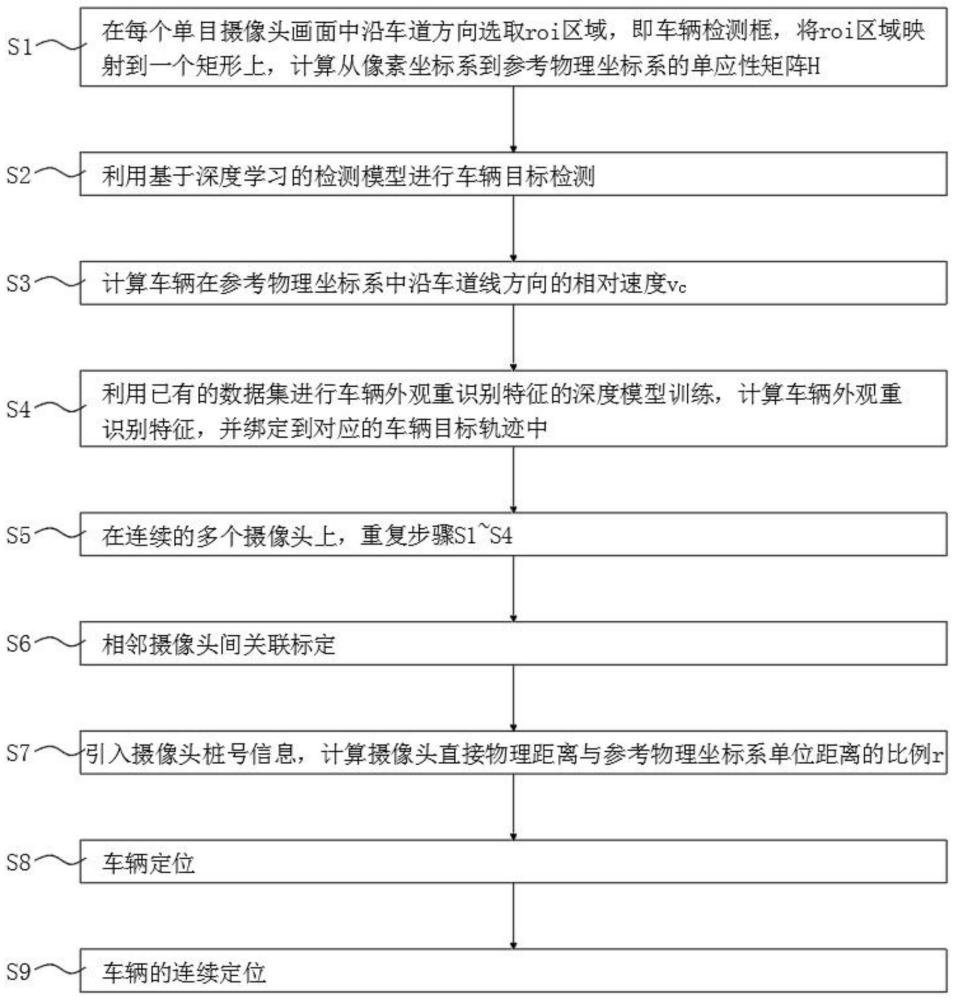
3、s1.在每个单目摄像头画面中沿车道方向选取roi区域,即车辆检测框,将roi区域映射到一个矩形上,计算从像素坐标系到参考物理坐标系的单应性矩阵h;
4、s2.利用基于深度学习的检测模型进行车辆目标检测;
5、s3.计算车辆在参考物理坐标系中沿车道线方向的相对速度vc;
6、s4.利用已有的数据集进行车辆外观重识别特征的深度模型训练,计算车辆外观重识别特征,并绑定到对应的车辆目标轨迹中;
7、s5.在连续的多个摄像头上,重复步骤s1~s4;
8、s6.相邻摄像头间关联标定;
9、s7.引入摄像头桩号信息,计算摄像头直接物理距离与参考物理坐标系单位距离的比例r;
10、s8.车辆定位;
11、使用单应性矩阵h将摄像头下的车辆目标自像素坐标准换为参考物理坐标,参考物理坐标与r相乘,即得车辆与roi起始位置之间的真实物理距离;
12、s9.车辆的连续定位;
13、通过摄像头n+1,对摄像头n中的车辆进行定位计算,定位计算重复步骤s8,从而现车辆的连续定位。
14、进一步,所述步骤s1中,单应性矩阵h的获取过程为:
15、在每个单目摄像头画面中沿车道方向选取roi区域,即矩形围合区域abcd,另定义一个10*100的矩形a’b’c’d’,使用opencv计算得到从abcd像素坐标系到a’b’c’d’参考物理坐标系的单应性矩阵h。
16、进一步,所述步骤s2中,基于深度学习的检测模型为yolov5模型。
17、进一步,所述步骤s3中,相对速度vc的计算过程为:
18、基于步骤s2的车辆目标检测结果,以车辆检测框下边沿中点像素位置为基准,使用单应性矩阵h将车辆目标转换到参考物理坐标系中,并在参考物理坐标系中利用卡尔曼滤波器进行车辆目标跟踪,然后根据目标跟踪,计算车辆在参考物理坐标系中沿车道线方向的相对速度vc。
19、进一步,所述步骤s6中,相邻摄像头间进行关联标定的过程为:
20、i.对第n个摄像头中的车辆目标进行跟踪,并计算车辆目标所在参考物理坐标系位置;
21、ii.查看第n+1个摄像头中是否有车辆a进入roi区域,计算车辆a的参考物理位置pj;
22、iii.从第n个摄像头中,筛选出与车辆a特征相似度符合阈值t0的目标轨迹ci以及目标轨迹ci所对应的车辆位置pi;
23、iv.对pj和pi两边取整进行统计,从而获取pj和pi之间的对应关系。
24、进一步,所述步骤s7中,r的技术表达式为:
25、
26、式中,mn+1为摄像头n+1的直接物理位置;mn为摄像头n的直接物理位置;pn为摄像头n+1与摄像头n的参考物理距离。
27、有益效果:
28、1.本发明给出了一种简化的标定方案,仅需要画定一个近似矩形的roi即可以实现单摄像头下的相对定位,只需要额外引入桩号信息即可以实现物理距离定位。
29、2.本发明通过参考物理坐标系定位,可以改善单摄像头下多目标跟踪算法的效果,提升目标被遮挡时轨迹的准确性。
30、3.本发明使用物理距离定位方式,可以提升接力跟踪的准确率。
31、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:1.一种基于视觉的车辆车速预测及连续定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于视觉的车辆车速预测及连续定位方法,其特征在于:所述步骤s1中,单应性矩阵h的获取过程为:
3.根据权利要求1所述的一种基于视觉的车辆车速预测及连续定位方法,其特征在于:所述步骤s2中,基于深度学习的检测模型为yolov5模型。
4.根据权利要求1所述的一种基于视觉的车辆车速预测及连续定位方法,其特征在于,所述步骤s3中,相对速度vc的计算过程为:
5.根据权利要求1所述的一种基于视觉的车辆车速预测及连续定位方法,其特征在于,所述步骤s6中,相邻摄像头间进行关联标定的过程为:
6.根据权利要求1所述的一种基于视觉的车辆车速预测及连续定位方法,其特征在于,所述步骤s7中,r的技术表达式为:
技术总结本发明公开了一种基于视觉的车辆车速预测及连续定位方法,在每个单目摄像头画面中沿车道方向选取roi区域,即车辆检测框,将roi区域映射到一个矩形上,计算从像素坐标系到参考物理坐标系的单应性矩阵H。然后采用深度学习模型实现单摄像头下的车辆目标检测,并将车辆目标由像素位置转换成相对物理位置,并应用卡尔曼滤波器进行单摄像头下的目标跟踪。利用跟踪计算出车辆的相对物理速度,进行多摄像头间的关联关系标定,从而确定车辆在不同摄像头下位置对应关系,并引入摄像头的桩号计算得到相对位置与绝对位置间的比例关系,从而实现车辆物理位置的定位。技术研发人员:向光华,王世森,李林峰,柳真,陈星州,杜晟,赖心,尹泽龙,李杨杨,黄钦,冉小华,黄导受保护的技术使用者:重庆首讯科技股份有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195095.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。