光电探测智能体及其训练反无人机智能体模型的方法
- 国知局
- 2024-07-31 23:04:03
本发明涉及人工智能,尤其是涉及一种光电探测智能体及其训练反无人机智能体模型的方法。
背景技术:
1、随着无人机技术的快速发展,无人机在各种领域中的应用逐渐广泛,各类无人机已成为收集情报、捕获目标和无人打击的不可缺少的途径。小型无人机往往被用来摧毁重要、昂贵的军事装备,如何通过现有的光电探测手段对小型威胁无人机进行探测跟踪是一项重要的研究课题。
2、光电转台或吊舱作为一种典型的光电成像探测设备,可以被广泛用于获取空中、地面、海面的目标和环境信息。然而,这类设备捕获目标的传统方法是通过人为手动操作来实现,需要经特殊培训的人员长时间值守,消耗大量的人力与物力。
3、因此,如何精准识别、准确追踪和灵活干扰无人机,提高反无人机系统的整体效能和安全性是本发明要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种光电探测智能体及其训练反无人机智能体模型的方法,不仅能够精准识别、准确追踪和灵活干扰无人机,还能提高反无人机系统的整体效能和安全性。
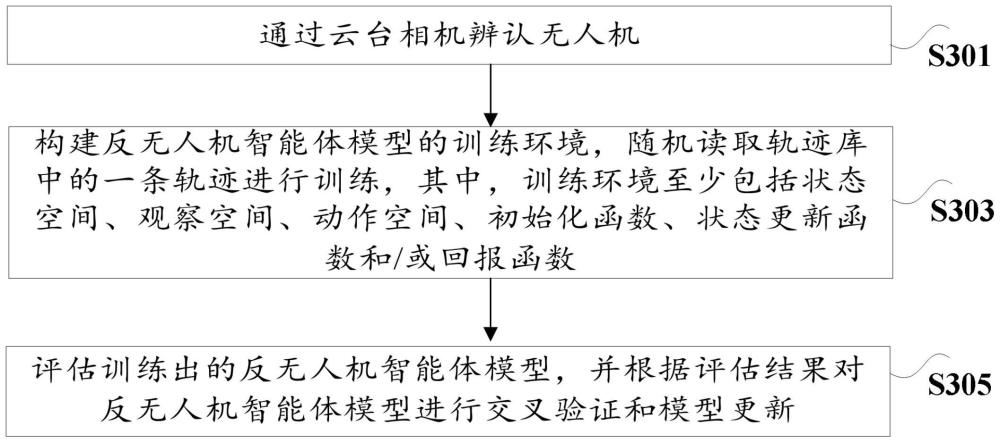
2、根据本发明的一方面,至少一个实施例提供了一种训练反无人机智能体模型的方法,包括:通过云台相机辨认无人机;构建反无人机智能体模型的训练环境,随机读取轨迹库中的一条轨迹进行训练,其中,所述训练环境至少包括状态空间、观察空间、动作空间、初始化函数、状态更新函数和/或回报函数;评估训练出的所述反无人机智能体模型,并根据评估结果对所述反无人机智能体模型进行交叉验证和模型更新。
3、根据本发明的另一方面,至少一个实施例还提供了一种捕获无人机的方法,包括:通过云台相机辨认无人机;通过反无人机智能体模型捕获所述无人机的轨迹,其中,所述反无人机智能体模型的训练环境至少包括状态空间、观察空间、动作空间、初始化函数、状态更新函数和/或回报函数;根据所述无人机的轨迹输出对所述云台相机的调整信息,以使所述反无人机智能体模型捕获无人机。
4、根据本发明的另一方面,至少一个实施例还提供了一种光电探测智能体,包括:处理器,适于实现各指令;以及存储器,适于存储多条指令,所述指令适于由处理器加载并执行:本发明研发的训练反无人机智能体模型的方法和/或本发明研发的捕获无人机的方法。
5、根据本发明的另一方面,至少一个实施例还提供了一种光电探测系统,包括:本发明研发的光电探测智能体;云台相机。
6、根据本发明的另一方面,至少一个实施例还提供了一种计算机可读的非易失性存储介质,存储计算机程序指令,当所述计算机执行所述程序指令时,执行:本发明研发的训练反无人机智能体模型的方法和/或本发明研发的捕获无人机的方法。
7、本发明通过上述方式,针对无人控制oe调整视场捕获无人机的问题,使用深度强化学习(drl)方法,基于真实环境使用gym库编写了对应的自定义训练环境,根据环境特点使用柔性演员-评论家(soft actor-critic,sac)算法对训练环境进行效果测试;同时设计了相应的测试环境,可以清晰显示出oe相关信息、视场范围以及uav的位置和相关信息,做到了精准识别、准确追踪和灵活干扰无人机,提高了反无人机系统的整体效能和安全性。
技术特征:1.一种训练反无人机智能体模型的方法,其特征在于,包括:
2.根据权利要求1所述的训练反无人机智能体模型的方法,其特征在于,通过云台相机辨认无人机包括:
3.根据权利要求1所述的训练反无人机智能体模型的方法,其特征在于,构建反无人机智能体模型的训练环境包括:
4.根据权利要求1所述的训练反无人机智能体模型的方法,其特征在于,所述轨迹库预设有固定路径、随机路径和/或人操作无人机生成路径,所述固定路径、所述随机路径和/或所述人操作无人机生成路径通过json、xml、txt和/或表格形式存储在轨迹库中,随机读取轨迹库中的一条轨迹进行训练包括:
5.根据权利要求4所述的训练反无人机智能体模型的方法,其特征在于,将所述一条轨迹输入所述反无人机智能体模型进行训练包括:
6.根据权利要求1所述的训练反无人机智能体模型的方法,其特征在于,评估训练出的所述反无人机智能体模型包括:
7.一种捕获无人机的方法,其特征在于,包括:
8.一种光电探测智能体,包括:
9.一种光电探测系统,包括:
10.一种计算机可读的非易失性存储介质,存储计算机程序指令,当计算机执行程序指令时,执行:如权利要求1-6任一所述的训练反无人机智能体模型的方法和/或如权利要求7所述的捕获无人机的方法。
技术总结本发明公开了一种光电探测智能体及其训练反无人机智能体模型的方法。该训练反无人机智能体模型的方法,包括:通过云台相机辨认无人机;构建反无人机智能体模型的训练环境,随机读取轨迹库中的一条轨迹进行训练,其中,所述训练环境至少包括状态空间、观察空间、动作空间、初始化函数、状态更新函数和/或回报函数;评估训练出的所述反无人机智能体模型,并根据评估结果对所述反无人机智能体模型进行交叉验证和模型更新。技术研发人员:朱斌,余继尧,解博,陈熠,朱耀轩,李晓霞受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195887.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表