基于深度视觉辅助的电力线实时识别与空间定位方法
- 国知局
- 2024-07-31 23:08:52
本发明涉及电力线实时识别与空间定位方法。
背景技术:
1、电力线作为电力系统的关键组成部分,其定期检测对于确保电力系统的稳定运行至关重要。目前,电力线检测方法主要包括传统人工检测、直升机检测、机器人检测、卫星检测以及无人机检测。随着无人机技术和高分辨率机载相机的快速发展,基于无人机的电力线检测逐渐成为研究热点。无人机不仅能进行巡检,还能执行更复杂的任务如异物清除、搭接电、滑车取放等,这增加了获取精确、实时的输电线三维空间信息的必要性。
2、当前,基于激光雷达(lidar)的输电线提取方法得到了广泛研究。在狭窄的电走廊区域,通过滤波方法去除地面点,保留非地面点云数据。利用非地面点云的空间几何特性,可以区分电力线点与植被点和杆塔点。然而,这种方法在处理复杂环境和实现实时处理方面存在限制。
3、相比之下,基于图像的电力线提取研究较少。虽然图像处理技术在对象识别方面取得了显著进步,但在精确识别并估计电力线的三维位置方面,尤其是在动态和复杂的环境中,仍面临重大挑战。现有技术在实时性、准确性、以及对动态环境的适应性方面尚待提高。
技术实现思路
1、本发明的目的是为了解决现有图像处理技术对电力线的识别以及三维位置估计方面存在实时性差、准确性低、以及对动态环境的适应性差的问题,而提出基于深度视觉辅助的电力线实时识别与空间定位方法。
2、基于深度视觉辅助的电力线实时识别与空间定位方法具体过程为:
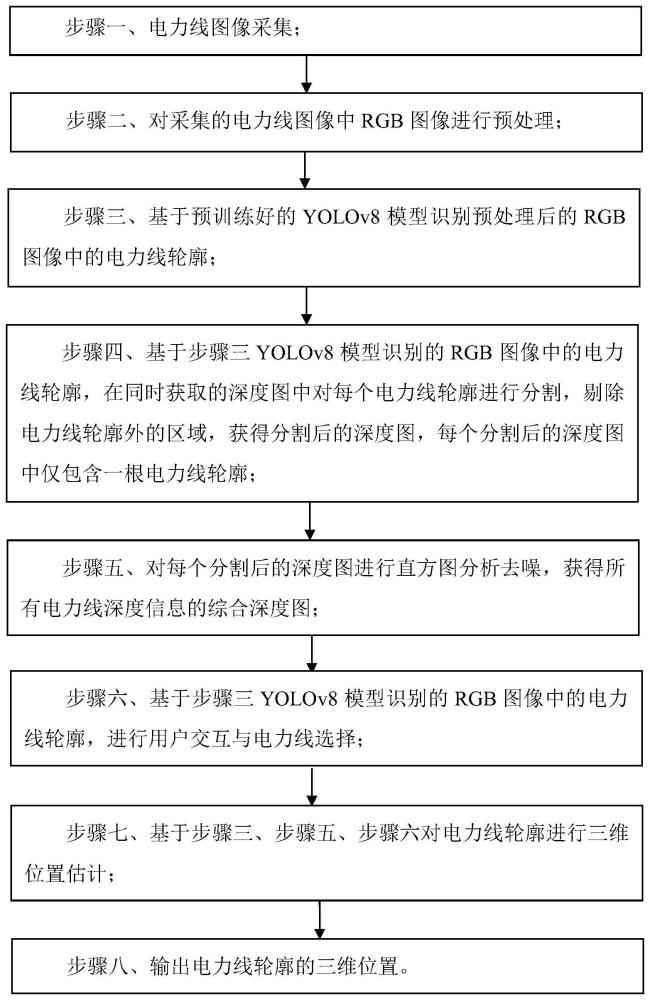
3、步骤一、电力线图像采集;
4、步骤二、对采集的电力线图像中rgb图像进行预处理;
5、步骤三、基于预训练好的yolov8模型识别预处理后的rgb图像中的电力线轮廓;
6、步骤四、基于步骤三yolov8模型识别的rgb图像中的电力线轮廓,在同时获取的深度图中对每个电力线轮廓进行分割,剔除电力线轮廓外的区域,获得分割后的深度图,每个分割后的深度图中仅包含一根电力线轮廓;
7、步骤五、对每个分割后的深度图进行直方图分析去噪,获得所有电力线深度信息的综合深度图;
8、步骤六、基于步骤三yolov8模型识别的rgb图像中的电力线轮廓,进行用户交互与电力线选择;
9、步骤七、基于步骤三、步骤五、步骤六对电力线轮廓进行三维位置估计:
10、步骤八、输出电力线轮廓的三维位置。
11、本发明的有益效果为:
12、本发明涉及机器视觉和深度学习在电力系统监测领域的应用。具体来说,它属于使用计算机视觉技术进行对象识别和空间定位的技术领域,特别是利用深度相机和深度学习算法对电力线缆进行实时识别和三维位置估计。该技术适用于自动化监控、智能电网管理、输电线路维护,以及其他需要高精度和实时电力线追踪与分析的场合。
13、本发明针对上述挑战,提出了一种结合深度学习和深度相机技术的电力线实时识别与空间定位系统。该系统旨在通过创新的图像处理和深度估计方法,克服现有技术的局限,实现对电力线的高效、精确且实时的识别和三维位置估计。
14、本发明引入yolov8进行电力线图像分割:与现有技术相比,yolov8在处理复杂背景和变化光照条件下具有更高的准确性和鲁棒性。
15、直方图分析去噪技术:本发明的直方图去噪方法针对电力线深度数据的特性进行优化,有效提高了3d定位的精确度,这在传统方法中很难实现。直方图分析进一步对深度数据进行纯化,识别并丢弃离群深度值,提高电力线深度信息的准确性。这个过程大大减少了虚假数据和异常值,产生了更清晰的深度图。将每个处理过的深度图组合成一个复合深度图,便于后续使用。
16、电力线的3d拟合优化:提出的电力线拟合算法简化了计算过程,不仅保证了处理速度,还适用于在移动平台上实时处理,大大增强了无人机在实际操作中的应用潜力。这个操作将大规模点云的三维拟合简化为了少量采样点的一维拟合,实验数据显示,相较于对全部点云进行主成分分析(pca)我们的方法提速90%
17、本发明提高识别准确性和效率:结合深度学习的yolo v8图像分割模型和传统图像处理技术,本系统能够快速准确地识别出复杂环境中的输电线。通过tensorrt优化的模型加速处理流程,提升了系统的整体效率。
18、增强三维位置估计的精度:利用深度相机和精细化的图像处理方法,系统能够精确计算输电线的三维坐标,提高位置估计的精度。通过直方图分析和深度数据的综合处理,有效减少了误差,提升了深度估计的准确性。
19、实时性能优化:通过高效的算法设计和ros节点的优化实现,系统能够实时处理图像和深度数据,适合动态环境下的应用。与基于激光雷达或其他更复杂系统相比,本系统在实时数据处理方面具有显著优势。
20、用户交互与操作简便性:鼠标点选功能提供了一种直观且简便的方式,使用户能够轻松选择特定的输电线进行分析。相比于需要复杂设定的系统,本系统的用户交互设计更为简洁和友好。
21、节约能耗和成本:
22、相较于需要大量计算资源的系统,本发明通过优化的算法降低了对计算资源的需求,从而节约能耗。利用常见的面阵激光雷达和标准硬件,减少了系统的整体成本。
23、总体而言,本发明在提高输电线识别和三维位置估计的精度、效率以及实时性能方面取得了显著成效,同时还具有操作简便和成本效益高等优点,这些优势使得该系统在复杂环境下的应用变得更加可行和高效。
技术特征:1.基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述方法具体过程为:
2.根据权利要求1所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤一中电力线图像采集;具体过程为:
3.根据权利要求2所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤二中对采集的电力线图像中rgb图像进行预处理;具体过程为:
4.根据权利要求3所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤三中基于预训练好的yolov8模型识别预处理后的rgb图像中的电力线轮廓;具体过程为:
5.根据权利要求4所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述预训练好的yolov8模型获取过程为:
6.根据权利要求5所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤四中基于步骤三yolov8模型识别的rgb图像中的电力线轮廓,在同时获取的深度图中对每个电力线轮廓进行分割,剔除电力线轮廓外的区域,获得分割后的深度图,每个分割后的深度图中仅包含一根电力线轮廓。
7.根据权利要求6所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤五中对每个分割后的深度图进行直方图分析去噪,获得所有电力线深度信息的综合深度图;具体过程为:
8.根据权利要求7所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤六中基于步骤三yolov8模型识别的rgb图像中的电力线轮廓,进行用户交互与电力线选择;具体过程为:
9.根据权利要求8所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤七中基于步骤三、步骤五、步骤六对电力线轮廓进行三维位置估计;具体过程为:
10.根据权利要求9所述的基于深度视觉辅助的电力线实时识别与空间定位方法,其特征在于:所述步骤八中输出电力线轮廓的三维位置;具体过程为:
技术总结基于深度视觉辅助的电力线实时识别与空间定位方法,本发明涉及电力线实时识别与空间定位方法。本发明的目的是为了解决现有图像处理技术对电力线的识别以及三维位置估计方面存在实时性差、准确性低、以及对动态环境的适应性差的问题。过程为:一、电力线图像采集;二、对采集的电力线图像中RGB图像进行预处理;三、基于预训练好的YOLOv8模型识别预处理后的RGB图像中的电力线轮廓;四、获得分割后的深度图,每个分割后的深度图中仅包含一根电力线轮廓;五、获得所有电力线深度信息的综合深度图;六、进行用户交互与电力线选择;七、对电力线轮廓进行三维位置估计;八、输出电力线轮廓的三维位置。本发明用于电力线实时识别与空间定位领域。技术研发人员:李湛,董晨,杨义鹏,于兴虎,高会军受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/196084.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表