一种基于机器学习的线缆重建方法与流程
- 国知局
- 2024-07-31 23:11:50
本发明涉及三维建模,更具体地说,涉及一种基于机器学习的线缆重建方法。
背景技术:
1、随着人工智能的不断发展,机器人在各个领域得到广泛应用,并逐渐取代了一些人工作业。旁路作业是电力系统作业中难度最大的一种作业,其作业环境复杂、涉及设备众多、安全隐患极大,为操作人员的安全带来极大的威胁。机器人代替人工进行旁路作业,不仅可以保障电力系统运维人员人身安全,也可以提高电力系统运维效率。
2、在旁路作业环境中,诸如输电线缆的可变形物体在受到外力时会发生形变,给机器人的感知和规划提出了挑战。机器人感知依赖于传感器获取环境信息,通过内置算法对环境信息进行解析,作为决策的依据。
3、因此,准确识别线缆并完成三维重建,对机器人旁路作业的作业目标对象感知,具有深远的理论意义与实践价值。
4、经检索,专利号为cn201910098785.3的专利文献公开了一种机载li dar点云电力线矢量化建模方法以及存储介质,该专利通过获取点云文件、对点云进行去噪、聚类获取各个电力线线段,再对电力线线段进行空间拟合、并将电力线段映射到平面,进行直线拟合,根据拟合的直线对选取空间点,将多个空间点连接,完成电力线建模。
5、上述专利在对电缆建模过程中,依据塔杆坐标分割电力线点云,利用空间拟合与平面直线拟合,完成对线缆的建模;而旁路作业中的电缆,在平面上的投影存在相互叠加的情况,无法采用简单的切割方法获取三维空间内连续的电缆点云,进而无法实现位于复杂工况下线缆的三维重建,无法满足机器人旁路作业的感知任务要求。
6、鉴于此,我们提出一种基于机器学习的线缆重建方法。
技术实现思路
1、本发明的目的在于提供一种基于机器学习的线缆重建方法,以解决上述背景技术中提出的问题。
2、本发明是通过以下技术方案实现的:
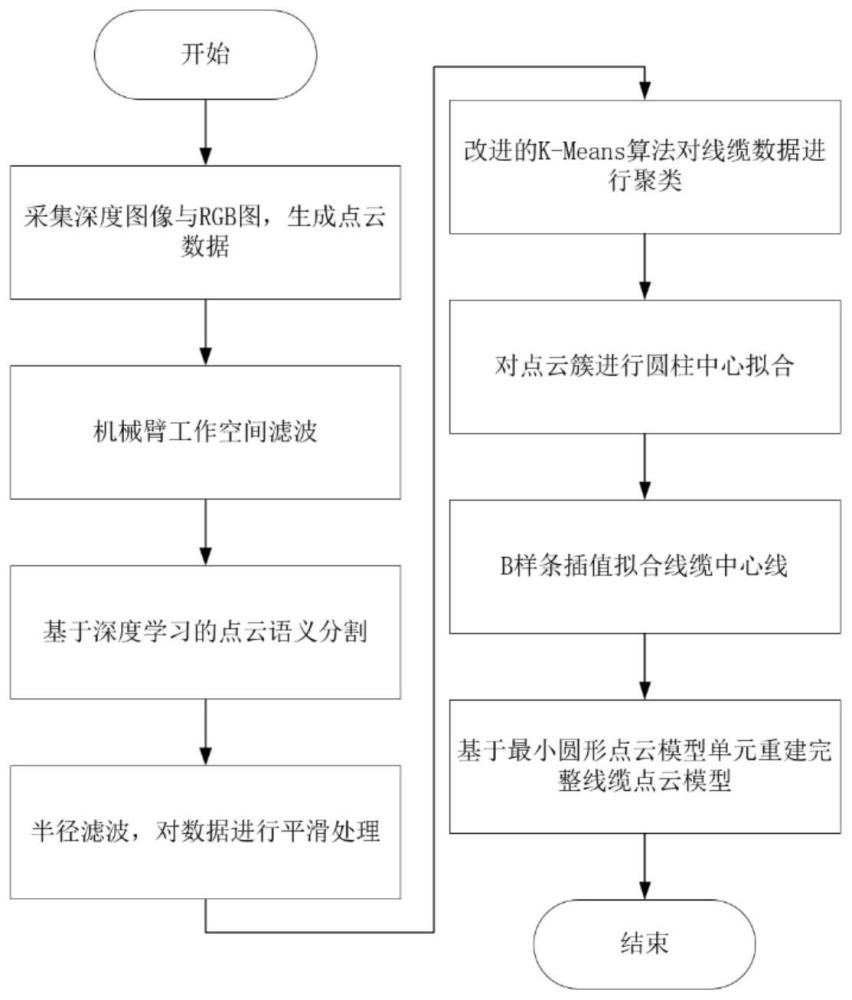
3、一种基于机器学习的线缆重建方法,包括以下步骤:
4、a、采集点云数据;
5、b、对采集到的点云数据进行预处理;
6、c、利用机器学习模型识别预处理后的点云数据中的线缆点云;
7、d、根据获取的线缆点云,完成对线缆的三维重建。
8、作为本技术文件技术方案的一种可选方案,所述步骤d包括以下子步骤:
9、s4、去除线缆点云中的离群点;
10、s5、将去除离群点后的线缆点云分割为多个点云簇;
11、s6、计算每个点云簇的圆柱体中心点;
12、s7、对多个圆柱体中心点进行拟合,获取线缆中心线;
13、s8、根据线缆中心线与线缆半径,完成对线缆三维重建。
14、作为本技术文件技术方案的一种可选方案,所述步骤a包括:利用相机采集深度图像与rgb图像,通过坐标系的转换使深度图像与rgb图像进行对齐,生成三维点云数据(x,y,z,r,g,b)。
15、作为本技术文件技术方案的一种可选方案,所述步骤b包括:利用机械臂工作空间对点云数据进行过滤,保留位于机械臂工作空间内的点云数据,滤除其他区域的数据点。
16、作为本技术文件技术方案的一种可选方案,所述步骤c包括以下子步骤:
17、s301、制作线缆识别训练数据集;
18、s302、搭建深度学习框架模型,使用线缆识别训练数据集训练模型;
19、s303、利用训练好的模型,识别预处理后的点云数据中的线缆点云。
20、作为本技术文件技术方案的一种可选方案,所述s4包括:
21、s401、将线缆点云中的所有点构建为一个kd-tree数据结构,依据设定的领域半径,计算每个点与领域点集之间的平均距离;
22、s402、根据平均距离,设线缆点云中所有点的距离构成高斯分布,其形状取决于平均距离和标准差,若平均距离超出设定的阈值,则定义为离群点并将之删除。
23、作为本技术文件技术方案的一种可选方案,所述s5包括:
24、s501、使用b样条插值拟合线缆点云,获取线缆拟合曲线;
25、s502、根据线缆拟合曲线,计算线缆的长度;
26、s503、根据线缆长度计算聚类簇的个数;
27、s504、使用最远点采样算法,对多个聚类簇的初始点进行选择;
28、s505、根据获得的多个聚类簇的初始点,使用k-means算法对线缆点云进行分割,获取多个点云簇与簇中心坐标。
29、作为本技术文件技术方案的一种可选方案,所述s6包括以下子步骤:
30、s601、利用pca计算每个点云簇的法向量v0,令该向量指向相机方向,利用下述公式进行约束:
31、v0(pv-pi)>0
32、其中pv是视点,代表相机坐标系的原点,pi是该点云簇内的点坐标;
33、s602、利用机理公式推导出每个点云簇的圆柱体中心点n;
34、n=pcur-rcv0
35、其中,rc是设定的线缆半径,pcur是该点云簇的簇中心坐标。
36、作为本技术文件技术方案的一种可选方案,所述s7包括:对所有圆柱体中心点使用b样条插值,拟合出线缆的中心线。
37、作为本技术文件技术方案的一种可选方案,所述s8包括:
38、s801、建立最小圆形点云模型,半径为设定的线缆半径,圆周上均匀分布500个点;
39、s802、对线缆中心线,均匀采样100个点,计算在每个点上的切向量vt,再按下述公式确定旋转矩阵r:
40、
41、其中vi是一个不与vz平行的任意向量,vx vy vz]是表示旋转轴的方向,即旋转围绕的轴在三维空间中的方向向量;
42、s803、获取变换矩阵mt:
43、
44、其中平移矩阵t即为采样点的坐标;
45、s804、计算重建后的线缆点云模型坐标:
46、
47、其中c为最小圆形点云模型坐标,cnew为重建线后缆点云模型的坐标。
48、与现有技术相比,本发明的有益效果是:
49、1.本技术通过利用机械臂工作空间对点云数据进行过滤,保留位于机械臂工作空间内的点云数据,滤除其他区域的数据点,大幅降低了点云数据,增加了机械臂工作空间内线缆三维重建的速度。
50、2.本技术通过使用机器学习算法,对工作空间内的目标线缆进行分离,解决了现有技术中无法对复杂工况下线缆点云提取的技术缺陷。
51、3.本技术通过去除识别的线缆点云中的离群点,增加了线缆三维重建模型的精度。
52、4.本技术通过采用最远点采样算法获取初始点,再利用k-means算法对线缆点云进行分割,最后采用圆柱体中心拟合方法,可以快速的获取到目标线缆的中心线。
53、5.本技术使用基于最小点云模型单元进行变换叠加得到最终的三维模型,能够有效的提升线缆三维重建模型的速度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196344.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表