一种进给系统内滚珠丝杠副振动的数值仿真方法及滚珠丝杠副进给系统与流程
- 国知局
- 2024-07-31 23:16:27
本发明涉及滚珠丝杠副,更具体的说是涉及一种进给系统内滚珠丝杠副振动的数值仿真方法及滚珠丝杠副进给系统。
背景技术:
1、滚珠丝杠进给系统因其具有的良好动力学性能被广泛应用于航空航天、数控机床等各种高精度设备中。在这些应用领域,滚珠丝杠进给系统的振动表现对设备的使用精度和使用寿命有着至关重要的影响,为满足市场对产品日益增长的高精度、高可靠性需求,滚珠丝杠副进给系统的振动特性逐渐成为了当前研究的热点。
2、但是目前缺少关于无外界激励情况下滚珠丝杠副进给系统出现的振动理论预测技术。通过建立详细的振动模型,能够分析不同因素下影响进给系统振动的机制。一方面将有助于进行振动控制理论的设计,另一方面有助于帮助研究人员设计出振动幅值更小的滚珠丝杠副进给系统。但是现有的方法中存在对于进给系统内滚珠丝杠副振动预测不精确的问题。
3、因此,如何提高对进给系统内滚珠丝杠副振动预测的准确性是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种进给系统内滚珠丝杠副振动的数值仿真方法及滚珠丝杠副进给系统,以解决背景技术中存在的问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一方面,提供一种进给系统内滚珠丝杠副振动的数值仿真方法,包括:
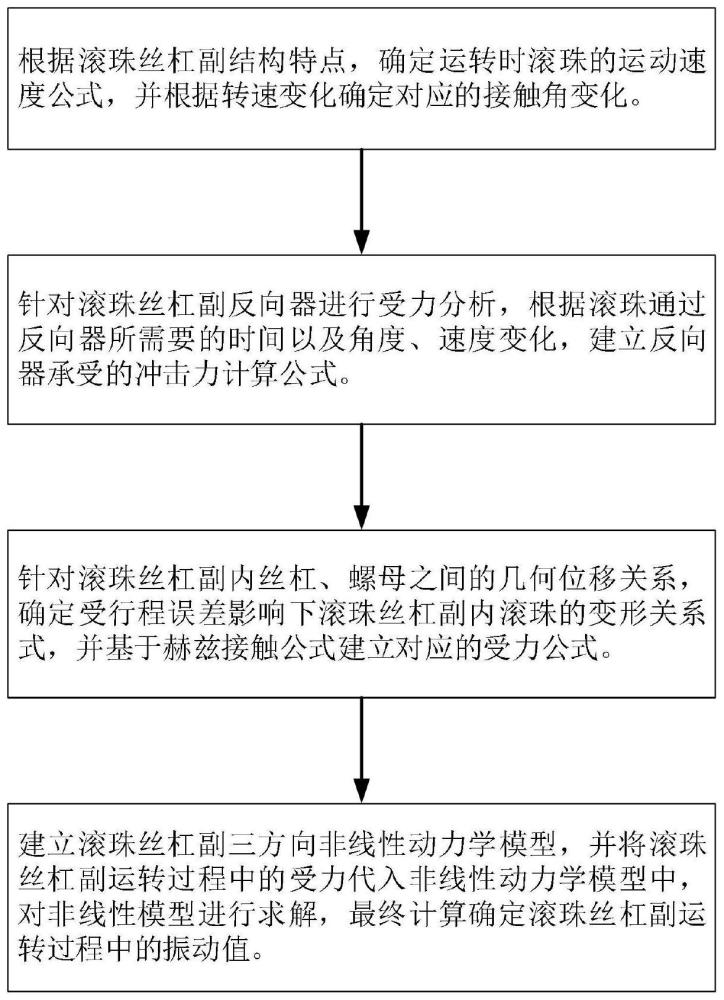
4、根据进给系统内双螺母滚珠丝杠副的结构,确定双螺母滚珠丝杠副内滚珠的运动速度;
5、基于运动速度对双螺母滚珠丝杠副的反向器进行受力分析,确定滚珠在某一速度下通过反向器时产生的冲击力;
6、对双螺母滚珠丝杠副的几何变形关系进行分析,确定工作时受丝杠轴行程误差影响下的丝杠、双螺母副的变形关系,并通过赫兹接触公式将变形关系转化为丝杠、双螺母的受力变化;
7、根据进给系统的结构,在得到的冲击力和受力变化的基础上,建立滚珠丝杠副进给系统动力学模型,并搭建对应非线性方程组,将受力变化代入非线性方程组中,确定进给系统内滚珠丝杠副的振动值。
8、可选的,所述运动速度包括根据滚珠丝杠副内滚珠、丝杠与双螺母的相对运动关系,确定丝杠旋转时滚珠对应的公转速度以及自转速度。
9、可选的,所述滚珠的公转速度计算公式采用以下方法确定:
10、
11、其中,wm为所述滚珠的公转计算公式,w为丝杠轴的转速,rm为丝杠轴的公称半径,rb为滚珠半径,α为滚珠与丝杠滚道接触点的接触角,θ为滚珠自转时的偏转角度;
12、所述滚珠的自转速度计算公式采用以下方法确定:
13、
14、其中,wr为所述滚珠的自转计算公式,β为丝杠轴的螺旋升角。
15、可选的,所述冲击力的计算过程为:根据滚珠的公转速度,计算滚珠通过反向器所需时间,并根据滚珠运动轨迹计算滚珠的速度变化,最后利用动量守恒定理,对滚珠通过反向器时产生的冲击力进行计算。
16、可选的,所述滚珠通过反向器产生的冲击力的计算公式为:
17、
18、其中,为所述反相器承受的冲击力在三个方向上的计算公式,mb为所述滚珠的质量,γ为滚珠在反向器内运动轨迹与丝杠轴的夹角,δt为所述滚珠通过反向器所需的时间。
19、可选的,所述丝杠、双螺母的受力变化分析过程如下:
20、建立丝杠副轴向坐标系与滚珠运动坐标系,测量滚珠丝杠副在进给系统内工作时,丝杠、双螺母的导程误差值;
21、计算滚珠丝杠副内丝杠轴、双螺母运动时的相对位移量,确定滚珠对应产生的变形,根据赫兹接触公式将变形转为受力,根据滚珠受力以及空间坐标,确定丝杠、双螺母受力关系。
22、可选的,所述丝杠、双螺母受力关系式如下:
23、建立以丝杠轴向为z轴的空间固定坐标系和以滚珠圆心为原点的frenct活动坐标系;
24、所述滚珠产生的变形采用以下公式确定:
25、
26、其中δδ为所述滚珠产生的变形计算公式,p是滚珠与滚道接触的平面内,丝杠滚道曲率中心跟螺母滚道曲率中心的直线距离,zn、zs分别是螺母、丝杠沿丝杠轴向的位移量,分别是螺母、丝杠滚道的行程误差,xn、xs分别是螺母、丝杠沿丝杠垂直径向的位移量,yn、ys分别是螺母、丝杠沿丝杠水平径向的位移量,是滚珠所处的空间角度;
27、其中,双螺母包括法兰螺母和圆螺母;所述法兰螺母、圆螺母受力采用以下公式确定:
28、
29、
30、其中分别为所述法兰螺母在x、y、z三方向上的受力计算公式,分别为所述圆螺母在x、y、z三方向上的受力计算公式,kn为双螺母滚道的赫兹接触系数,δδ法兰螺母-i为法兰螺母内第i颗滚珠产生的变形,是法兰螺母内第i颗滚珠所处的空间角度,l为法兰螺母内的滚珠总数,δδ圆螺母-i为圆螺母内第i颗滚珠产生的变形,是圆螺母内第i颗滚珠所处的空间角度,r是圆螺母内的滚珠总数;
31、所述丝杠受力采用以下公式确定:
32、
33、其中分别为所述丝杠在x、y、z三方向上的受力计算公式,ks为丝杠轴的赫兹接触系数。
34、可选的,所述进给系统内滚珠丝杠副的振动值通过以下方式确定:
35、根据进给系统结构,将两个轴承视为弹簧阻尼系统,将工作台视作与法兰螺母固连的质点,将双螺母中任一螺母内的所有螺母滚珠视为一个弹簧阻尼系统,以及将滑块导轨副在轴向上视为阻尼系统,部件的质量、刚度和阻尼参数集中于质心处,将丝杠轴视为刚体;
36、基于动力学模型,搭建进给系统非线性动力学方程组,将进给系统内滚珠丝杠副因运转产生的受力变化带入非线性动力方程组中,计算进给系统内滚珠丝杠副的振动值。
37、可选的,所述动力学方程组为:
38、
39、其中m法兰螺母、m圆螺母、m丝杠分别为所述法兰螺母、圆螺母、丝杠的质量,c法兰螺母、c圆螺母、c丝杠分别为法兰螺母、圆螺母、丝杠的阻尼值,fp为丝杠的预紧力,k为垫片的刚度;分别为法兰螺母、圆螺母、丝杠在x方向上的加速度,分别为法兰螺母、圆螺母、丝杠在x方向上的速度,分别为法兰螺母、圆螺母、丝杠在y方向上的加速度,分别为法兰螺母、圆螺母、丝杠在y方向上的速度,分别为法兰螺母、圆螺母、丝杠在z方向上的加速度,分别为法兰螺母、圆螺母、丝杠在z方向上的速度。
40、另一方面,提供一种滚珠丝杠副进给系统,包括电机、联轴器、轴承、工作台、滑块导轨副、双螺母以及丝杠;
41、所述丝杠包括两个轴承;所述滑块导轨副包括导轨以及四个滑块;四个所述滑块分布在所述工作台的四个角;所述双螺母包括法兰螺母、圆螺母以及垫片,所述双螺母内部包括滚珠;所述垫片设置在所述法兰螺母以及所述圆螺母之间;
42、所述滚珠丝杠副进给系统在所述电机的动力下,通过所述联轴器带动所述丝杠转动,所述丝杠的两端分别通过轴承进行支撑;所述丝杠带动所述滚珠将所述动力传给所述双螺母,并带动所述双螺母和所述工作台沿着导轨方向移动,所述滑块支撑并约束所述工作台。
43、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种进给系统内滚珠丝杠副振动的数值仿真方法及滚珠丝杠副进给系统,根据进给系统内双螺母滚珠丝杠副的结构,确定双螺母滚珠丝杠副内滚珠的运动速度;基于运动速度对双螺母滚珠丝杠副的反向器进行受力分析,确定滚珠在某一速度下通过反向器时产生的冲击力;对双螺母滚珠丝杠副的几何变形关系进行分析,确定工作时受丝杠轴行程误差影响下的丝杠、双螺母副的变形关系,并通过赫兹接触公式将变形关系转化为丝杠、双螺母的受力变化;建立滚珠丝杠副进给系统动力学模型,并搭建对应非线性方程组,将受力变化代入非线性方程组中,确定进给系统内滚珠丝杠副的振动值。本发明提供的方法精确度高,误差小。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。