基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法、装置及存储介质
- 国知局
- 2024-07-31 23:20:22
本发明涉及结构健康监测及智能控制领域,尤其是涉及一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法、装置及存储介质。
背景技术:
1、机器学习算法可以灵敏地识别结构健康监测(shm)系统多年来积累的大量历史数据中的涡激振动部分,并逐渐成为一种有效的涡振识别方法。但是目前的识别方法仍具有一定的局限性,主要原因如下:(1)需要目标桥梁历史涡振数据来确定涡振识别算法中的模型或参数,但是许多大跨度桥梁在过去没有发生过涡振或涡振数据尚未记录,因此难以确定算法中的模型或参数;(2)一些基于聚类的涡振识别算法需要结合人工判别才能够识别shm系统中积累数年的大量历史数据中的涡激振动,且很难实现在shm系统中实时识别涡激振动;(3)涡振识别算法难以同时适用于多座同类型桥梁,需要针对每一座大跨桥梁分别构建识别算法。
2、另外,涡激振动持时长,危害大,需要对涡激振动进行控制干预,但目前的控制方法具有一定的局限性,主要原因在于现阶段对桥梁涡激振动控制的各种气动措施的研究仍是通过风洞试验对具体桥梁进行分析,并未从本质上说明其原理,且大多措施仍属于被动控制措施,调控模式单一且低效,缺乏有针对性的智能主动/半主动在线早期控制方法。
技术实现思路
1、本发明的目的就是为了提供一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法、装置及存储介质。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,包括:
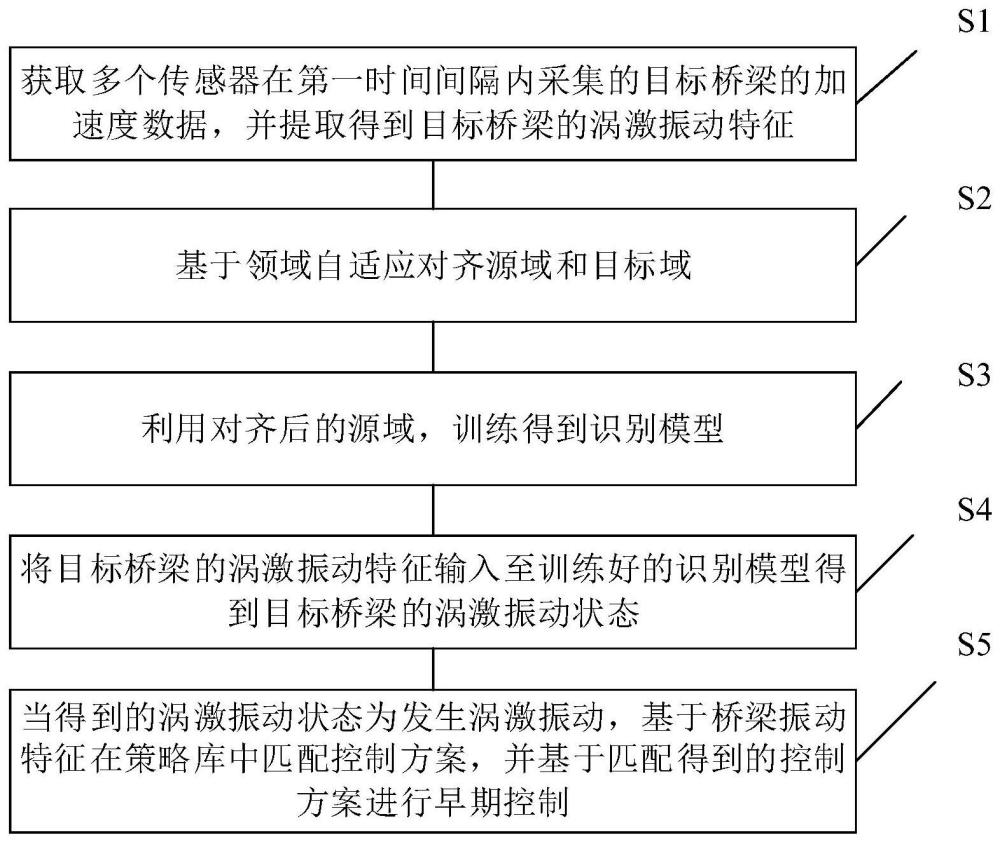
4、步骤s1:获取多个传感器在第一时间间隔内采集的目标桥梁的加速度数据,并提取得到目标桥梁的涡激振动特征;
5、步骤s2:基于领域自适应对齐源域和目标域,其中,目标域为目标桥梁的涡激振动特征,源域为相同方式得到的其他桥梁发生涡激振动时的涡激振动特征;
6、步骤s3:利用对齐后的源域,训练得到识别模型;
7、步骤s4:将目标桥梁的涡激振动特征输入至训练好的识别模型得到目标桥梁的涡激振动状态;
8、步骤s5:当得到的涡激振动状态为发生涡激振动,基于桥梁振动特征在策略库中匹配控制方案,并基于匹配得到的控制方案进行早期控制。
9、所述涡激振动特征包括统计特征和频域特征,所述统计特征包括加速度方根幅值rms、标准差v和hopkins统计量h,
10、所述加速度方根幅值rms的数学表达式为:
11、
12、其中:n为信号采样点的数量,yi为第i个采样点的加速度数据,
13、所述标准差v的数学表达式为:
14、
15、其中:为振动信号的平均值。
16、所述hopkins统计量h的获取过程包括:
17、步骤s1-1-1:从所有信号采样点中随机选择一部分作为随机采样点;
18、步骤s1-1-2:对于每一个随机采样点,在样本空间中找到与该随机采样点最近的点,并将找到的最近的点与该随机采样点的距离作为对应于该随机采样点的最小距离;
19、步骤s1-1-3:在样本的可能范围内随机生成多个虚拟点,其中虚拟点的数量与随机采样点的数量一致;
20、步骤s1-1-4:在样本空间中,为每个虚拟点找到与之最近的点,并将找到的点与该虚拟点的距离作为对应于该虚拟点的最小距离;
21、步骤s1-1-5:得到hopkins统计量h:
22、
23、其中:k为随机采样点的数量,xk为对应于第k个随机采样点的最小距离,lk为对应于第k个虚拟点的最小距离。
24、所述频域特征包括主频psd幅值p、能量集中系数r和主频相对变化量dw,所述能量集中系数r是主频psd幅值p和第二主频psd幅值的比值
25、所述主频相对变化量dw的获取过程具体包括:
26、步骤s1-2-1:将第一时间间隔内的加速度数据均分为两段;
27、步骤s1-2-2:将前一段数据的主频率和后一段数据的主频率的差值,除以前一段数据和后一段数据的主频平均值,得到的结果作为主频相对变化量dw。
28、所述第一时间间隔的长度为十分钟。
29、所述步骤s2中,通过平衡分配适应法进行特征变换迁移,使用源域数据和标签训练一个分类器,训练好的分类器直接应用于目标域数据得到目标域的伪标签。
30、所述策略库的建立过程包括:
31、对目标桥梁进行多模态涡激振动分析,得到不同模态涡激振动下的桥梁振动特征以及对桥梁的危害程度;
32、基于桥梁既有的主动和半主动控制器,通过数值模拟分析,针对各桥梁振动特征进行控制参数优化,形成该工况下的最优控制策略。
33、所述步骤s5具体包括:
34、步骤s5-1:当得到的涡激振动状态为发生涡激振动时,提取实时的桥梁振动特征,其中,所述桥梁振动特征包括涡激振动频域和时域振幅参数;
35、步骤s5-2:基于得到的实时的桥梁振动特征在策略库中匹配控制方案,并基于匹配得到的控制方案进行早期控制。
36、一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制装置,包括存储器、处理器,以及存储于所述存储器中的程序,所述处理器执行所述程序时实现如上述的方法。
37、一种存储介质,其上存储有程序,所述程序被执行时实现如上述的方法。
38、与现有技术相比,本发明具有以下有益效果:无需目标桥梁涡激振动数据,可以实现实时或在历史数据集中识别起始阶段的涡激振动,并且适用于多座大跨桥梁。本发明中控制方法可在涡激振动发生初期自动对涡激振动进行主动/半主动精确控制,大大提高控制效率及准确性。
技术特征:1.一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述涡激振动特征包括统计特征和频域特征,所述统计特征包括加速度方根幅值rms、标准差v和hopkins统计量h,
3.根据权利要求2所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述hopkins统计量h的获取过程包括:
4.根据权利要求2所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述频域特征包括主频psd幅值p、能量集中系数r和主频相对变化量dw,所述能量集中系数r是主频psd幅值p和第二主频psd幅值的比值
5.根据权利要求1所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述第一时间间隔的长度为十分钟。
6.根据权利要求1所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述步骤s2中,通过平衡分配适应法进行特征变换迁移,使用源域数据和标签训练一个分类器,训练好的分类器直接应用于目标域数据得到目标域的伪标签。
7.根据权利要求1所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述策略库的建立过程包括:
8.根据权利要求1所述的一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法,其特征在于,所述步骤s5具体包括:
9.一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制装置,包括存储器、处理器,以及存储于所述存储器中的程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-8中任一所述的方法。
10.一种存储介质,其上存储有程序,其特征在于,所述程序被执行时实现如权利要求1-8中任一所述的方法。
技术总结本发明涉及一种基于领域自适应的桥梁主梁涡激振动智能识别与早期控制方法、装置及存储介质,其中方法包括:步骤S1:获取多个传感器在第一时间间隔内采集的目标桥梁的加速度数据,并提取得到目标桥梁的涡激振动特征;步骤S2:基于领域自适应对齐源域和目标域,其中,目标域为目标桥梁的涡激振动特征,源域为相同方式得到的其他桥梁发生涡激振动时的涡激振动特征;步骤S3:利用对齐后的源域,训练得到识别模型;步骤S4:将目标桥梁的涡激振动特征输入至训练好的识别模型得到目标桥梁的涡激振动状态;步骤S5:当得到的涡激振动状态为发生涡激振动,基于桥梁振动特征在策略库中匹配控制方案,并基于匹配得到的控制方案进行早期控制。与现有技术相比,本发明大大提高了控制效率及准确性。技术研发人员:万春风,侯佳乐,李璞玉受保护的技术使用者:东南大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197068.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。