融合特征向量的角度和距离的车辆识别方法、装置及软件
- 国知局
- 2024-07-31 23:22:27
本技术涉及计算机视觉和图像处理,尤其涉及融合特征向量的角度和距离的车辆识别方法、装置及软件。
背景技术:
1、在智能交通系统、车辆跟踪系统和道路安全监控系统等应用场景中,通过图像识别算法对车辆的车牌、车型以及车身颜色等特征进行识别能够极大地提高道路安全监测的效率。
2、swin transformer模型是视觉深度学习模型的重大突破,swin transformer模型解决了以往计算机视觉领域中多个难题,例如图像分辨率高、视觉实体特征多以及特征提取能力弱等问题,而swin transformer模型极大地提高了模型图像处理的速度。
3、比如,在智能交通系统中,需要对来往的每种车型进行车流量统计,则需要先通过道路摄像头对经过的每辆车进行车辆图像拍摄,然后将图像输入深度学习模型进行识别。
4、对于图像数据的实体识别,图像场景的复杂程度带来了巨大困难。例如同一款车型在同一个道路的图像场景,会因为光照强度、道路能见度、摄像头视角畸变以及车辆被改装等多种因素的影响,而导致模型对该款车型实体的识别出错。常见有把该款车型识别成其他颜色、其他品牌或者其他车型。
5、因此,对于上述的技术难题,在目前计算机视觉领域的解决方法都是增加图像数据的特征提取数量,来调整模型的超参数、网络结构、损失函数。这种解决方法一是增加实体标注的工作量,二是模型的参数量变多。
6、因此,在transformer架构的基础上,将微软提出的swin transformer架构应用在图像处理模型中进一步解决了上述技术难题,swin transformer架构的模型也为道路车辆识别方法带来了减少计算量的改进。
7、但是由于行车道路系统的拍摄环境复杂,成像质量参差不齐,车辆识别模型准确率不高。
8、因此,为了增强车辆识别模型对跨域图像的特征提取能力,本技术提供一种融合特征向量的角度和距离的车辆识别方法。
技术实现思路
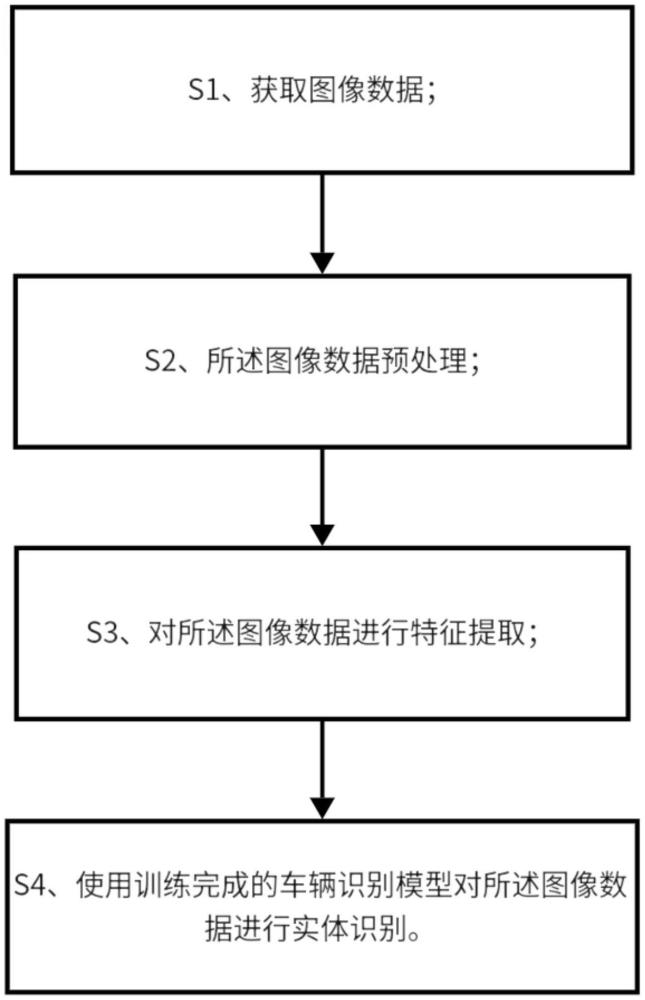
1、为克服相关技术中存在的问题,本技术提供一种融合特征向量的角度和距离的车辆识别方法,包括以下步骤:
2、s1、获取图像数据;
3、s2、所述图像数据预处理;
4、s3、对所述图像数据进行特征提取;
5、s4、使用训练完成的车辆识别模型对所述图像数据进行实体识别;
6、所述车辆识别模型的融合损失函数包括有:角度度量损失支路和距离度量支路;所述融合损失函数表达式为:
7、
8、其中,lf为所述融合损失函数的函数值,la为所述角度度量损失支路的函数值,ld为所述距离度量支路的函数值;
9、所述角度度量损失支路用于计算所述图像数据的特征向量与类特征向量之间的角度;
10、所述距离度量支路用于计算所述图像数据的特征向量与类特征向量之间的距离。
11、在一种实施方式中,所述获取图像数据之前,还包括:
12、构建所述车辆识别模型;
13、根据图像数据集训练所述车辆识别模型;
14、根据融合损失函数优化所述车辆识别模型。
15、在一种实施方式中,所述构建所述车辆识别模型,具体包括:
16、所述车辆识别模型设置有车辆特征提取模块,所述车辆特征提取模块包括有依次连接的:块分割层、线性嵌入层和三个采样层;
17、所述块分割层设置有卷积核,通过所述卷积核卷积得到所述图像数据的块标记;
18、所述线性嵌入层将所述块分割层输出的块标记投影到任意维;
19、所述采样层设置有块合并层和swin transfomer块,通过所述块合并层和swintransfomer块对所述线性嵌入层的输出进行采样,得到所述图像数据的特征向量。
20、在一种实施方式中,其特征在于,所述根据融合损失函数优化所述车辆识别模型,具体包括:
21、所述角度度量损失支路的损失函数为:
22、
23、在一种实施方式中,所述根据融合损失函数优化所述车辆识别模型,还包括:
24、对待识别的特征向量进行缩放,缩放公式为:
25、witf=sf×cosθi
26、其中,||wj||置为1,sf为缩放后的特征向量f,θf表示特征向量f与第i类的权重向量wi的角度。
27、在一种实施方式中,所述距离度量支路的损失函数为:
28、ld=ω1ld+(1-ω1)ln
29、其中,ld为组间损失函数值,ld为日域组内损失函数值,ln为夜域组内损失函数值,ω1为权重参数。
30、在一种实施方式中,所述获取图像数据之前,还包括:
31、s401、通过夜图像生成器和日图像生成器分别生成夜域图像和日域图像;
32、s402、根据夜图像判别器评估生成的所述夜域图像的真实置信度,根据日图像判别器评估生成的所述日域图像的真实置信度;
33、s403、根据所述夜图像判别器或所述日图像判别器输出的真实置信度判断gan模型是否训练完成,若是则重新执行步骤s401,若否,则结束生成器的迭代。
34、在一种实施方式中,对两次生成的图像数据的特征向量的损失函数为:
35、
36、
37、其中,gm为日图像生成器,gq为夜图像生成器,dm为日图像判别器为,dq为夜图像判别器,m表示日间域,q表示夜间域,m表示m域的训练样本,q表示q域的训练样本,pdata(q)表示样本q的数据分布,pdata(m)表示样本m的数据分布,λ为权重参数。
38、本技术第二方面提供一种车辆识别装置,基于上述任一项所述的车辆识别方法,包括有:图像拍摄模块和计算模块;
39、所述图像拍摄模块用于获取所述图像数据;
40、所述计算模块用于执行所述车辆识别方法。
41、本技术第三方面提供一种计算机软件,按照上述任一项所述的车辆识别方法编码。
42、本技术提供的技术方案可以包括以下有益效果:
43、本技术中的车辆识别模型中,构建的融合损失函数比单一损失函数增加夹角距离这一聚类信息,车辆识别模型能够充分减少特征向量的类内距离,同时增加特征向量的类间距离,使得车辆识别模型能够对输入的图像数据进行更准确地预测。
44、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
45、附图说明
46、通过结合附图对本技术示例性实施方式进行更详细的描述,本技术的上述以及其它目的、特征和优势将变得更加明显,其中,在本技术示例性实施方式中,相同的参考标号通常代表相同部件。
47、图1为本技术实施例所示的车辆识别方法的流程示意图;
48、图2为本技术实施例所示的车辆识别方法的另一流程示意图;
49、图3为本技术实施例示出的车辆识别模型的架构示意图;
50、图4为用于训练本技术实施例示出的车辆识别模型的训练数据集生成方法的流程示意图。
51、图5为本技术实施例示出的训练数据集生成模型的架构示意图。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197263.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。