一种无人机飞行控制方法、系统、设备及介质
- 国知局
- 2024-07-31 23:32:14
本技术涉及无人机,尤其涉及一种无人机飞行控制方法、系统、设备及介质。
背景技术:
1、在现代自动化和遥控领域,四旋翼飞行器(无人机)因其卓越的机动性和灵活性而被广泛应用于各种任务中,如监控、农业、救援行动等。然而,这些应用常常要求四旋翼飞行器在复杂和动态变化的环境中稳定运行,尤其是在面对瞬间剧烈的干扰(如强风、气流突变、力交互等)时。这种干扰可能导致飞行器失去控制,甚至坠毁,从而带来安全风险和经济损失。相关技术中,四旋翼飞行器控制系统采用基于pid的方法进行无人机飞行控制。但是,在极端或未预测的环境条件下,基于pid的方法难以进行有效的控制,导致无人机失控,影响了无人机飞行的稳定性和安全性。综上,相关技术中存在的技术问题有待得到改善。
技术实现思路
1、本技术实施例的主要目的在于提出一种无人机飞行控制方法、系统、设备及介质,能够提高无人机飞行的稳定性和安全性。
2、为实现上述目的,本技术实施例的一方面提出了一种无人机飞行控制方法,所述方法包括:
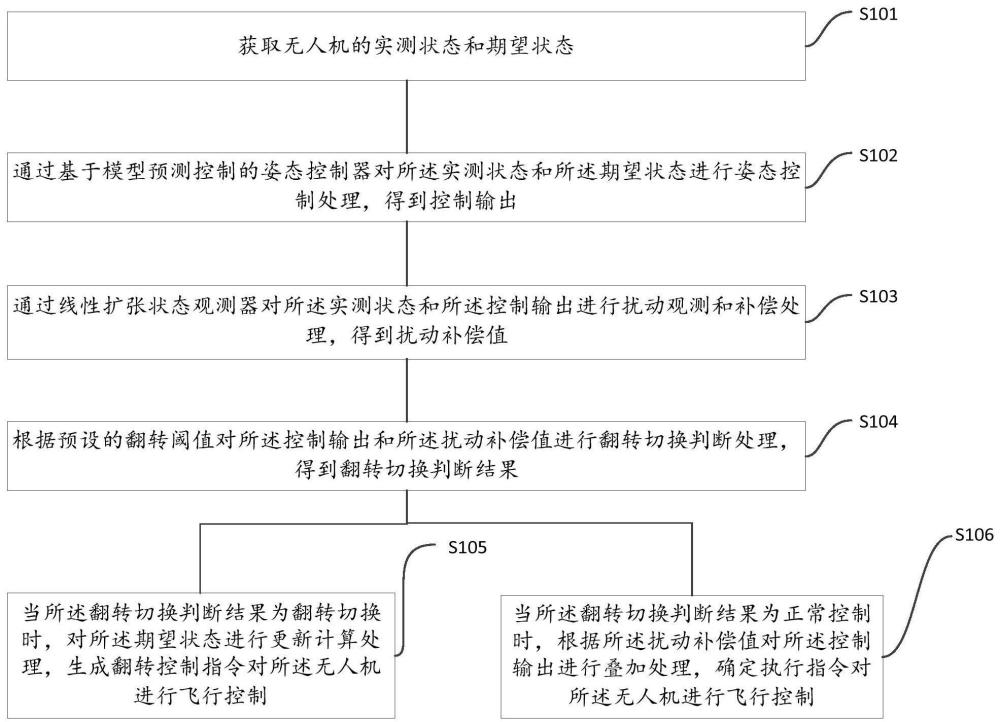
3、获取无人机的实测状态和期望状态;
4、通过基于模型预测控制的姿态控制器对所述实测状态和所述期望状态进行姿态控制处理,得到控制输出;
5、通过线性扩张状态观测器对所述实测状态和所述控制输出进行扰动观测和补偿处理,得到扰动补偿值;
6、根据预设的翻转阈值对所述控制输出和所述扰动补偿值进行翻转切换判断处理,得到翻转切换判断结果;
7、当所述翻转切换判断结果为翻转切换时,对所述期望状态进行更新计算处理,生成翻转控制指令对所述无人机进行飞行控制;
8、当所述翻转切换判断结果为正常控制时,根据所述扰动补偿值对所述控制输出进行叠加处理,确定执行指令对所述无人机进行飞行控制。
9、在一些实施例中,所述通过基于模型预测控制的姿态控制器对所述实测状态和所述期望状态进行姿态控制处理,得到控制输出,包括:
10、对所述实测状态和所述期望状态进行轨迹生成处理,得到球面参考轨迹;
11、根据所述球面参考轨迹进行模型预测控制处理,得到控制输出。
12、在一些实施例中,所述对所述实测状态和所述期望状态进行轨迹生成处理,得到球面参考轨迹,包括:
13、获取默认参数;
14、根据最速控制综合函数对所述默认参数进行迭代生成处理,得到插值系数集合;
15、根据所述插值系数集合对所述实测状态和所述期望状态进行球面轨迹几何插值处理,得到球面参考轨迹。
16、在一些实施例中,所述根据所述球面参考轨迹进行模型预测控制处理,得到控制输出,包括:
17、对所述球面参考轨迹的每一个球面参考轨迹点进行构建处理,生成查找表;
18、获取所述实测状态,对所述实测状态进行坐标转换处理,得到姿态向量;
19、根据所述姿态向量对所述查找表进行滑动窗口查找处理,得到参考轨迹片段;
20、通过预测模型对所述参考轨迹片段进行姿态控制优化处理,得到控制输出。
21、在一些实施例中,所述通过线性扩张状态观测器对所述实测状态和所述控制输出进行扰动观测和补偿处理,得到扰动补偿值,包括:
22、通过所述线性扩张状态观测器所述控制输出进行角速度估计和扩展状态估计,得到系统估计值;
23、根据所述实测状态对所述系统估计值进行误差计算处理,得到扰动补偿值。
24、在一些实施例中,所述当所述翻转切换判断结果为翻转切换时,对所述期望状态进行更新计算处理,生成翻转控制指令对所述无人机进行飞行控制,包括:
25、对所述期望状态进行更新,得到翻转状态;
26、通过基于模型预测控制的姿态控制器对所述实测状态和所述翻转状态进行姿态控制处理,得到翻转控制输出;
27、通过线性扩张状态观测器对所述实测状态和所述翻转控制输出进行扰动观测和补偿处理,得到翻转扰动补偿值;
28、根据所述翻转扰动补偿值对所述翻转控制输出进行叠加处理,确定翻转控制指令对所述无人机进行飞行控制。
29、在一些实施例中,在所述获取无人机的实测状态和期望状态之前,还包括对所述无人机进行集成处理,具体包括:
30、对所述无人机集成三维电子调速器和正反转螺旋桨;
31、通过所述三维电子调速器驱动无刷电机对所述无人机进行正反方向旋转;
32、通过所述正反转螺旋桨在所述无人机进行正反方向旋转时提供稳定一致的推力。
33、为实现上述目的,本技术实施例的另一方面提出了一种无人机飞行控制系统,所述系统包括:
34、第一模块,用于获取无人机的实测状态和期望状态;
35、第二模块,用于通过基于模型预测控制的姿态控制器对所述实测状态和所述期望状态进行姿态控制处理,得到控制输出;
36、第三模块,用于通过线性扩张状态观测器对所述实测状态和所述控制输出进行扰动观测和补偿处理,得到扰动补偿值;
37、第四模块,用于根据预设的翻转阈值对所述控制输出和所述扰动补偿值进行翻转切换判断处理,得到翻转切换判断结果;
38、第五模块,用于在所述翻转切换判断结果为翻转切换时,对所述期望状态进行更新计算处理,生成翻转控制指令对所述无人机进行飞行控制;
39、第六模块,用于在所述翻转切换判断结果为正常控制时,根据所述扰动补偿值对所述控制输出进行叠加处理,确定执行指令对所述无人机进行飞行控制。
40、为实现上述目的,本技术实施例的另一方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现前面所述的方法。
41、为实现上述目的,本技术实施例的另一方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前面所述的方法。
42、本技术实施例至少包括以下有益效果:本技术提供一种无人机飞行控制方法、系统、设备及介质,该方案通过基于模型预测控制的姿态控制器对实测状态和期望状态进行姿态控制处理,得到控制输出,能够结合模型预测和全方位姿态控制对无人机进行控制,能够在所有姿态方向上实现有效控制,并能增强控制的鲁棒性,进一步降低无人机坠毁风险;另外,本方案还通过线性扩张状态观测器对实测状态和控制输出进行扰动观测和补偿处理,得到扰动补偿值,能够实时估计并补偿系统内外的干扰,提高了无人机飞行控制的稳定性;再者,本方案能够根据预设的翻转阈值对控制输出和扰动补偿值进行翻转切换判断处理,得到翻转切换判断结果;当翻转切换判断结果为翻转切换时,对期望状态进行更新计算处理,生成翻转控制指令对无人机进行飞行控制;当翻转切换判断结果为正常控制时,根据扰动补偿值对控制输出进行叠加处理,确定执行指令对无人机进行飞行控制,从而根据翻转切换策略有效地判断外部干扰是否超出了无人机的可承受范围,增强了无人机飞行控制的稳定性和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197875.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表