一种全伺服等时同步驱动自升式海洋平台自适应控制系统
- 国知局
- 2024-07-31 23:41:12
本发明涉及海洋工程装备,特别涉及一种全伺服等时同步驱动自升式海洋平台自适应控制系统。
背景技术:
1、自升式海洋平台(jack-up)是海洋油气资源开采的关键设备之一,主要由平台本体、桩腿、升降装置等几大部分组成。桩腿一般采用桁架桩腿结构,目前主流机型是采用3个桩腿,每个桩腿都设计成三角形桁架结构,三角桁架由3根弦杆立柱组成,每个弦杆两侧对立铺设2根齿条,每个齿条上有多个齿轮与其啮合。海洋平台升降时,由每个桩腿上的多个电机共同驱动齿轮运转进而驱动平台上升、下降运行。控制平台升降的升降装置,其控制性能直接决定了整个平台的平稳性、安全性和可靠性,因此升降装置的自动控制是自升式海洋平台的核心关键技术之一。
2、现有的自升式海洋平台升降技术大都是采用变频器驱动普通感应电机的方式来实现,主要存在以下问题:
3、(1)这种变频-普通感应电机驱动控制方案只有直接的速度闭环控制,没有直接的位置闭环控制,因此其位置控制精度不高,特别是在速度较高时位置精度更难以控制,很容易造成几个桩腿位置偏差较大从而使平台倾斜变形甚至出现倾覆。另外,普通感应电机静态扭矩和低速下输出扭矩较低,特别是平台升降启动瞬间需要克服机械的静摩擦,阻力较大,所以电机转速在低转速特别是启动阶段控制不平稳,从而使得整个海洋平台在升降启动的时性能变差。
4、(2)多电机同步控制目前多采用纯速度同步的方式,并没有考虑到在连续运行过程中各电机负荷偏载产生的问题。整个桩腿齿条行程较长,存在局部制造和装配尺寸方面的误差,每个齿条或者同一齿条不同位置的齿距和齿形都难以保持完全一致,这就很容易导致在局部运行过程中出现负载力矩不均的偏载现象,在同一时间各驱动电机的负载力矩会出现较大的差异,甚至出现两个驱动电机出力方向完全相反的恶劣情况,这时候出反力的电机就成了出正力电机的负载,产生内耗,多电机同步不能很好的形成合力,导致升降总驱动力不足从而使海洋平台不能连续平稳运行而出现卡滞、卡死现象。
5、(3)在平台升降运行过程中,若某个驱动或者电机不能正常工作时,整个控制方案中没有对应的冗余容错机制,从而导致整个升降系统停止工作。
技术实现思路
1、针对现有技术的缺陷,本发明提供了一种全伺服等时同步驱动自升式海洋平台自适应控制系统,桩腿升降全部采用伺服电机直接位置闭环控制,位置控制精度高。每个桩腿都采用双层虚拟主轴冗余容错技术及irt位置同步控制技术,即可实现多电机群组的高精度位置同步,又可实现双层的动态冗余容错保护,显著提高控制系统的安全性。最重要的是,单个桩腿上所有电机在同步过程中均采用动态负荷自调整技术,有效解决机械传动机构局部制造或装配尺寸偏差带来的偏载问题,实现各电机全行程全时段的负荷均衡,极大提高系统的容错控制和可靠性。
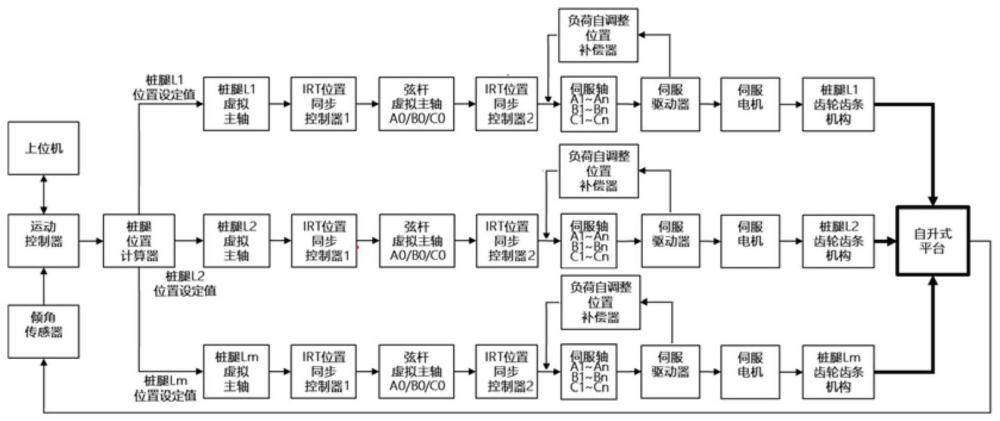
2、为了达到上述目的,本发明提供了一种全伺服等时同步驱动自升式海洋平台自适应控制系统,包括:带有桩腿的自升式平台、上位机、主控制器、倾角传感器、桩腿位置计算器以及针对每一个桩腿的控制模块;
3、所述自升式平台、倾角传感器、主控制器和桩腿位置计算器依次连接;所述主控制器还与所述上位机连接进行信息交换;所述上位机,用于整个系统的人机交互界面,实现控制系统的状态监视、参数设置及相关操作;
4、所述倾角传感器检测所述自升式平台的实时倾角,并将其传输给所述主控制器;所述主控制器,对检测到的所述自升式平台的实时倾角进行采样,并将其与从所述上位机处得到的所述自升式平台目标位置设定值传送给所述桩腿位置计算器;所述桩腿位置计算器用于根据所述自升式平台目标位置设定值和采样倾角计算各个所述桩腿的位置设定值,并将其传送给每一个所述桩腿的控制模块;
5、每一个桩腿对应一个所述控制模块,且均于所述桩腿位置计算器连接,根据所述桩腿的位置设定值采用基于双层虚拟主轴冗余容错控制及irt位置同步的伺服电机对所述桩腿进行位置控制。
6、进一步的,每个所述控制模块包括负荷自调整位置补偿器模块和依次连接的桩腿虚拟主轴模块、第一irt位置同步控制器模块、弦杆虚拟主轴模块、第二irt位置同步控制器模块、伺服轴模块、伺服驱动器模块、伺服电机模块以及齿轮齿条机构模块;
7、每个所述桩腿包括m个弦杆,每个所述弦杆设有1个齿条,每个所述齿条上设有n个齿轮,组成n个齿轮齿条机构,每个齿轮齿条机构设有1个伺服电机进行驱动;每个所述桩腿设有一个虚拟主轴,每个所述弦杆设有一个弦杆虚拟主轴;
8、所述桩腿虚拟主轴模块,以所述桩腿位置计算器输出的位置设定值作为目标位置对所述桩腿虚拟主轴进行位置控制;
9、所述第一irt位置同步控制器模块包括一个irt等时同步位置同步控制器,用于控制m个所述的弦杆虚拟主轴与所述桩腿虚拟主轴的等周期实时位置同步控制;
10、所述弦杆虚拟主轴模块包括m个弦杆虚拟主轴子模块,对应m个所述弦杆虚拟主轴,每一个所述弦杆虚拟主轴子模块以所述第一irt等时同步位置同步控制器的输出作为目标位置进行位置控制;
11、所述第二irt位置同步控制器模块,包括n个irt位置同步控制器子模块,每一个所述irt位置同步控制器子模块包括一个irt等时同步位置同步控制器,用于控制n个所述伺服轴与对应的所述弦杆虚拟主轴的等周期实时位置同步控制;
12、所述伺服轴模块,包括m*n个伺服轴;所述负荷自调整位置补偿器模块,包括m*n个负荷自调整位置补偿器;所述伺服驱动器模块,包括m*n个伺服驱动器;所述伺服电机模块,包括m*n个伺服电机;所述齿轮齿条机构模块,包括m*n个所述齿轮齿条机构;所述伺服轴、负荷自调整位置补偿器、伺服驱动器、伺服电机以及齿轮齿条机构一一对应;每n个所述伺服轴、负荷自调整位置补偿器、伺服驱动器、伺服电机以及齿轮齿条机构对应所述桩腿的一个弦杆;
13、所述伺服驱动器,包括电流环和速度环,用于伺服控制的电流环和速度环控制,并将电机力矩设定值反馈给所述负荷自调整位置补偿器;
14、所述伺服电机,用于驱动其对应的所述齿轮齿条机构,进而驱动所述自升式平台进行同步升降;每个所述伺服电机上都装有编码器,实时检测电机的位置和速度,并将所述速度信息反馈给所述伺服驱动器进行速度环控制;
15、所述负荷自调整位置补偿器,用于根据所述伺服驱动器的输出的电机力矩设定值进行位置补偿值计算;
16、所述伺服轴模块,以所述第二irt位置同步控制器模块的输出和所述负荷自调整位置补偿器模块输出的位置补偿值之和作为目标位置,对对应的所述伺服轴进行位置控制。
17、进一步的,每一个所述桩腿中的m个所述弦杆,选定一个为主弦杆,其余为从弦杆;每一个所述弦杆对应的n个所述伺服电机,选定一个为主伺服电机,其余为从伺服电机;
18、进一步的,所述负荷自调整位置补偿器具体为:
19、针对每一个所述桩腿中的每一个所述弦杆下的从伺服电机所对应的所述负荷自调整位置补偿器,接收所述从伺服电机以及其对应的所述主伺服电机反馈的电机力矩设定值,以所述主伺服电机反馈的电机力矩设定值和预设的消隙预紧力设定值之和作为目标值,实时比对所述从伺服电机的电机的力矩设定值和所述目标值,如果力矩偏差值超过设定的容差范围,就输出一个缩小力矩偏差值的位置补偿值,从而使每个所述弦杆内的主从伺服电机负荷均衡;
20、针对每一个所述桩腿中的每一个所述从弦杆下的主伺服电机所对应的所述负荷自动调整位置补偿器,接收所述从弦杆下的主伺服电机以及其对应的所述桩腿的主弦杆的主伺服电机反馈的电机力矩设定值,以所述桩腿中的主弦杆的主伺服电机反馈的电机力矩设定值作为目标值,实时比对所述从弦杆下的主伺服电机的力矩设定值和所述目标值,如果力矩偏差值超过设定的容差范围,就输出一个缩小力矩偏差值的位置补偿值,从而使同一所述桩腿上各不同所述弦杆上的主伺服电机负荷均衡。
21、进一步的,所述负荷自调整位置补偿器使用优化的pid控制器,其通过bp-rbf神经网络或遗传算法对pid控制参数进行优化。
22、进一步的,在所述弦杆虚拟主轴模块中,每个所述弦杆虚拟主轴对应连接一个选择开关,通过选择开关实现每个所述弦杆虚拟主轴选择性的与对应的所述桩腿虚拟主轴通过所述第一irt位置同步控制器模块建立位置同步关系;
23、同样地,在所述伺服轴模块中,每个所述伺服轴对应连接一个选择开关,通过选择开关实现每个所述伺服轴选择性的与对应的所述弦杆虚拟主轴通过第二irt位置同步控制器模块建立位置同步关系。
24、本发明还提供了一种全伺服等时同步驱动自升式海洋平台自适应控制方法,其采用如上任一项所述的全伺服等时同步驱动自升式海洋平台自适应控制系统实现,包括以下步骤:
25、(1)设定每个桩腿的主弦杆,判断各从弦杆是否故障,针对每一个弦杆,进一步设定每个弦杆对应的主伺服电机,判断各从伺服电机是否故障;故障弦杆以及故障从伺服电机均被旁路掉;
26、(2)桩腿位置计算器根据倾角传感器检查到的海洋平台的实时位置并结合机械结构参数和海洋平台目标高度计算出每个桩腿的位置控制目标值;所有桩腿虚拟主轴按计算出的位置控制目标值启动运行;
27、(3)通过第一irt位置同步控制器模块,所有所述从弦杆与所述主弦杆的irt位置同步建立启动;
28、(4)通过第二irt位置同步控制器模块,所有所述弦杆的主伺服电机与对应的弦杆虚拟主轴的irt位置同步建立启动;所有所述弦杆所有从伺服电机与所在弦杆虚拟主轴的irt位置同步建立启动;
29、(5)针对每一个所述桩腿中的每一个所述弦杆下的从伺服电机所对应的所述负荷自调整位置补偿器,接收所述从伺服电机以及其对应的所述主伺服电机反馈的电机力矩设定值,以所述主伺服电机反馈的电机力矩设定值和预设的消隙预紧力设定值之和作为目标值,实时比对所述从伺服电机的电机的力矩设定值和所述目标值,如果力矩偏差值超过设定的容差范围,就输出一个缩小力矩偏差值的位置补偿值,从而使每个所述弦杆内的主从伺服电机负荷均衡;
30、针对每一个所述桩腿中的每一个所述从弦杆下的主伺服电机所对应的所述负荷自动调整位置补偿器,接收所述从弦杆下的主伺服电机以及其对应的所述桩腿的主弦杆的主伺服电机反馈的电机力矩设定值,以所述桩腿中的主弦杆的主伺服电机反馈的电机力矩设定值作为目标值,实时比对所述从弦杆下的主伺服电机的力矩设定值和所述目标值,如果力矩偏差值超过设定的容差范围,就输出一个缩小力矩偏差值的位置补偿值,从而使同一所述桩腿上各不同所述弦杆上的主伺服电机负荷均衡;
31、(6)所有所述伺服电机驱动整个海洋平台按设定的控制位置有条不紊的上下升降运行。
32、本发明的有益效果:
33、本发明通过双层虚拟主轴冗余容错控制及irt(等时实时)位置同步的伺服电机对所有桩腿进行位置控制,实时动态调整确保单个桩腿上所有电机在位置同步的基础上实现负荷均衡,可以有效克服机械传动机构局部制造或装配尺寸偏差带来的偏载问题,实现各电机全行程全时段的负荷均衡,从而显著提高系统的容错空间和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198080.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表