一种用于样品探测系统的鲁棒自抗扰的扫描控制系统
- 国知局
- 2024-07-31 23:43:29
本发明涉及同步辐射纳米聚焦装置的荧光扫描成像领域,尤其涉及一种用于样品探测系统的鲁棒自抗扰的扫描控制系统。
背景技术:
1、纳米技术的发展使人类对自然的认识和改造从微米层深入到分子、原子级的纳米层次,并揭示出一系列新的现象和新的规律,促使材料、生物和生命技术等领域的研究产生新的突破。随着高亮度的第三代同步辐射光源以及先进的x射线聚焦光学元件、探测器和计算机等的发展,同步辐射微纳聚焦系统的空间分辨率逐渐提高,从微米级发展到纳米级,与其相关的扫描荧光成像实验技术也迅速发展,为纳米科技人员研究纳米级空间分辨的元素微区分布提供了强有力的工具。
2、在样品探测系统中,通过移动样品扫描台并在指定的样品位置点同步触发荧光探测器,实现对样品的荧光扫描成像。其中,样品扫描台的运动定位精度和扰动抑制能力,对纳米级荧光扫描成像的准确性具有重要影响。样品扫描台广泛使用压电驱动的纳米位移台,该位移台能够满足快速响应和高定位分辨率的定位要求。但对于纳米级定位控制系统来说,被控对象模型的不确定性以及外界扰动的问题,都极易造成样品探测系统的定位精度和稳定性变差,从而导致纳米级荧光扫描成像的图像模糊、扭曲等。因此,如何有效增强样品探测系统的抗扰动能力,提高系统的定位精度和鲁棒稳定性,从而获取准确的荧光扫描成像,成为发展同步辐射纳米聚焦装置的关键。
3、目前,样品探测系统采用的控制方法主要为传统pid控制,但pid在控制参数和结构不确定以及存在外部扰动的复杂过程时,由于pid参数由经验法得到,且不能在线实时自适应调节优化,当外界环境、负载发生变化时,其控制精度和稳定性必然受到影响。此外,pid中的误差积分的作用对于常值扰动效果比较显著,对于随时变化的扰动,积分反馈的抑制能力不足以满足控制要求。
4、针对pid控制方法的不足,专利文件【兰旭颖;张招红;张继超;李爱国;王劼,基于波带片纳米聚焦装置的快速扫描x射线荧光成像实验系统,原子能科学技术,2019,53(12):2478-2484】公开了在样品探测系统中采用鲁棒控制方法。
5、但所设计的控制方法仅考虑了模型不确定性,没有针对样品探测系统中存在的随机扰动进行观测并加以抑制,同时对于系统的跟踪定位仍采用pid控制,在面对复杂过程控制时具有局限性。其中,模型不确定性主要考虑实际被控对象的模型不精确,并且在动态过程中,模型的结构、模型参数是不确定的,可能会随着运动有所改变;随机扰动主要考虑外界环境比如振动、温漂对被控对象造成的干扰。
6、为此,急需提出一种新的用于样品探测系统的鲁棒自抗扰的扫描控制系统,以解决同步辐射纳米聚焦装置中,被控模型不确定性和外部扰动对纳米级荧光扫描成像准确性的影响。
技术实现思路
1、本发明的目的在于提供一种用于样品探测系统的鲁棒自抗扰的扫描控制系统,以能够解决样品探测系统模型不确定性、外部干扰和跟踪定位的问题,确保扫描成像的准确性。
2、为了实现上述目的,本发明提供一种用于样品探测系统的鲁棒自抗扰的扫描控制系统,包括:
3、扫描控制模块,其设置为驱动样品扫描台按预设的运动轨迹运动,预设的运动轨迹包括多个理想位移值所对应的位置点;
4、鲁棒自抗扰控制模块,其设置为实现样品扫描台的跟踪定位和稳定性控制,以用于保证荧光扫描成像中扫描台能够按预设的运动轨迹精确运动;所述鲁棒自抗扰控制模块包括:
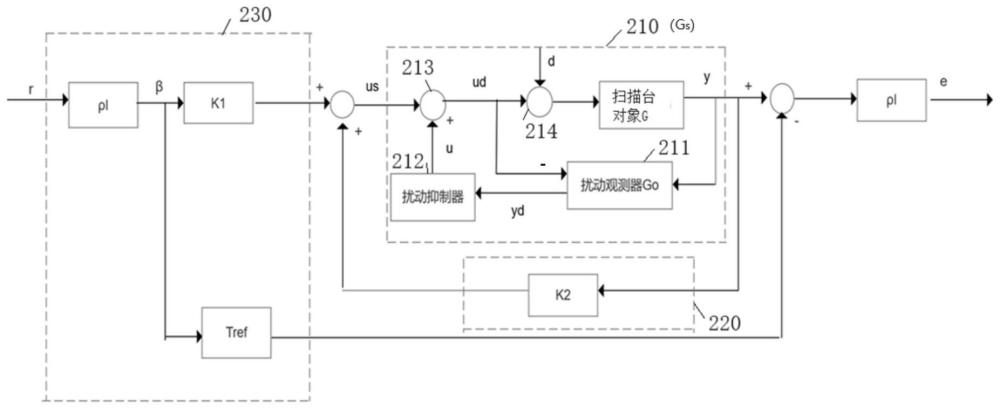
5、被控对象单元,其包括扰动观测器、扰动抑制器、和受到扰动观测器和扰动抑制器的作用的扫描台对象模型g,扫描台对象模型g以样品扫描台接收的扫描台控制量ud作为输入,以样品扫描台的实际位移值y作为输出;
6、鲁棒控制系统,其包括一个鲁棒反馈控制器k2,该鲁棒反馈控制器k2接收样品扫描台的实际位移值y并与之相乘,且乘积结果yk2作为被控对象gs的控制信号us的一部分;和
7、跟踪定位控制系统,其设置为对参考输入r进行尺度变换,根据尺度变换后的参考输入β和参考轨迹模型tref得到参考轨迹模型tref的输出的位移,作为样品台期望的运动轨迹;得到样品扫描台的实际位移值y和参考轨迹模型tref输出的位移的差值e;此外,通过前置滤波器k1接收尺度变换后的参考输入β并与之相乘,乘积结果βk1作为被控对象gs的控制信号us的一部分;
8、所述鲁棒自抗扰控制模块的设计目标是使得被控对象单元的不确定性对控制信号us、样品扫描台的实际位移值y以及样品扫描台的实际位移值y和参考轨迹模型tref输出的位移的差值e的增益最小。
9、所述扰动观测器用于观测得到扰动观测器模型,所述扰动观测器模型go用于描述具有外部干扰及模型不确定性的扫描台对象,表示为go=gp(s)+gd;所述扰动观测器设置为接收样品扫描台的实际位移值y和扫描台控制量ud,输出的等效干扰估计值yd,使得等效干扰估计值yd为yd=(ud+d)g(s)go(s)-ud;所述扰动抑制器接收等效干扰估计值yd,最小化等效干扰估计值yd中的扰动信号并给出扰动抑制控制量u,以抑制等效干扰估计值中的外部扰动和模型不确定性对被控对象单元的影响;所述扰动抑制器包括接收扰动抑制控制量u和等效干扰估计值yd的第一滤波器,以及接收所述第一滤波器的滤波结果并输出扰动抑制控制量u的线性二次调节器;且所述被控对象单元还包括第一加和器,用于将扰动抑制控制量u与一控制信号us加和,以输出扫描台控制量ud。
10、所述扰动观测器模型go以扫描台对象模型g作为标称模型,在此基础上建立摄动对象的不确定性描述gp(s)以及外部扰动gd(s),gp(s)∈t,t为可能的摄动对象模型构成的集合,用以描述扫描台对象模型g的模型参数和结构的不确定性。
11、所述第一滤波器输出等效干扰估计值yd所对应的状态方程的状态变量x的最优估计状态变量x的最优估计满足:
12、
13、其中,u是扰动抑制控制量,x是状态变量,是状态变量的最优估计,是状态变量的最优估计的微分,kf增益矩阵,a为状态方程的状态矩阵,b为状态方程的输入矩阵,c为状态方程的输出矩阵;
14、所述线性二次调节器设置为:
15、步骤a1:通过最小化确定性代价函数,求得最优状态反馈矩阵kr;
16、确定性代价函数jr为:
17、
18、其中,x(t)是状态变量,上标t表示转置,u(t)为扰动抑制控制量,q和r是适当选取的常值权矩阵;
19、最优状态反馈矩阵kr为:
20、kr=r-1btx,
21、其中,r是适当选取的常值权矩阵,b是状态方程的输入矩阵,x是状态变量;
22、步骤a2:以第一滤波器输出等效干扰估计值所对应的状态方程的状态变量x的最优估计作为输入,根据最优状态反馈矩阵kr和最优估计求出最优的扰动抑制控制量u(t),最优的扰动抑制控制量u(t)为u(t)=-krx(t)。
23、所述鲁棒反馈控制器k2为具有鲁棒性的h。。回路整形控制器。
24、所述鲁棒自抗扰控制模块的前置滤波器k1和鲁棒反馈控制器k2通过如下方式来获取得到:
25、步骤b1:将扰动观测器和扰动抑制器作用的被控对象单元作为一个整体建立摄动对象模型形式的一个被控对象模型gs,具体包括:得到被控对象模型gs的左互质分解的分解因式ms和ns,并设置表示被控对象模型gs的不确定性δns和δms,得到被控对象模型gs的不确定性δns和δms对被控对象模型gs的作用函数
26、步骤b2:为被控对象模型gs寻求一个镇定控制器k=[k1 k2],该镇定控制器能够最小化和[ust yt et]t间的传递函数的h∞范数,其中,是被控对象模型gs的不确定性δns和δms对被控对象模型gs的作用函数,r是参考输入,us是被控对象的控制信号,y是样品扫描台的实际位移值,e是样品扫描台的实际位移值y和参考轨迹模型tref输出的位移的差值。
27、在所述步骤b2中,所述鲁棒反馈控制器k2的获取包括:
28、步骤c1:设置鲁棒反馈控制器k2的目标,鲁棒反馈控制器k2的目标是由到的h∞范数γ满足:
29、
30、步骤c2:根据鲁棒反馈控制器k2的目标,求解鲁棒反馈控制器k2的值。
31、所述步骤b2还包括前置滤波器k1的获取和鲁棒反馈控制器k2的优化,具体包括:
32、步骤d1:设置前置滤波器k1的目标,所述前置滤波器k1的目标是确保满足:
33、||(i-gsk2)-1gsk1-tref||∞≤γtρ-2,
34、其中,γt表示迭代参数,tref是参考轨迹模型,ρ是尺度变换标量参数,i是单位矩阵;
35、步骤d2:根据所述前置滤波器k1的目标和和[ust yt et]t间的传递函数,同时求解前置滤波器k1和优化鲁棒反馈控制器k2。
36、所述扫描控制模块还设置为在样品扫描台的实际位移值达到理想位移值时向探测器输出同步触发信号,以触发探测器采集当前位置点的探测信号;重复移动至下一个理想位移值所对应的位置点,直到全部的运动轨迹扫描完成,根据各个位置点的探测信号形成整个样品面扫描的成像。
37、所述样品探测系统包括样品扫描台、与样品扫描台连接的传感器、探测器和与所述样品扫描台、传感器和探测器均连接的控制器,所述用于样品探测系统的鲁棒自抗扰的扫描控制系统安装于所述控制器上。
38、本发明的用于样品探测系统的鲁棒自抗扰的扫描控制系统可有效解决同步辐射样品探测系统模型不确定性、外部扰动以及跟踪定位的控制问题,通过扰动观测器以及抑制装置的建立,能够同时抑制不确定性和随机扰动对系统的影响。
39、本发明的用于样品探测系统的鲁棒自抗扰的扫描控制系统所采用的鲁棒自抗扰控制模块和现有鲁棒控制相比,增加了扰动观测器和扰动抑制器,从而不仅针对模型不确定性的问题,还可以处理外部扰动对系统的影响。具体来说,利用公式确定等效干扰估计值,然后将此等效干扰估计值经过滤波和线性二次调节器的处理,最小化等效干扰估计值中的扰动信号并给出扰动抑制控制量u,以实现对外部扰动和模型不确定性的抑制,减小其对控制系统精度和稳定性的影响。鲁棒控制系统用于进一步增强控制系统的鲁棒性,将gs作为被控对象,通过建立具有鲁棒性的控制系统,能够进一步保证系统在不确定性和扰动的共同作用下,仍能维持预期性能,并增强系统的鲁棒稳定性。
40、此外,本发明通过在鲁棒控制系统中额外引入一个前置滤波器,能够强制闭环的鲁棒控制系统的响应跟踪参考轨迹模型的响应,以改善控制系统的动态特性和保证跟踪定位精度。
41、综上所述,本发明所提出的控制方法能够有效增强系统的抗扰动能力和稳定性,进一步减小不确定性对系统的影响,使控制系统对于“最坏情况下”的不确定性,依然能满足跟踪定位和稳定性的控制指标要求。在样品探测系统荧光扫描成像实验中采用本方法,可以有效提高样品处光斑定位精度和稳定性,消除荧光图像特征扭曲,增强荧光扫描成像的准确性,使其真正成为纳米科技研究人员的“眼”和“手”,从而促进纳米技术的发展。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198278.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。