一种无人驾驶拖拉机系统及其控制方法与流程
- 国知局
- 2024-07-31 23:43:23
本技术涉及农业机械,并且更具体地,涉及一种无人驾驶拖拉机及其控制方法。
背景技术:
1、近年来,“精细化农业”的概念随着计算机和信息技术的发展被广泛认可和推广,无人驾驶技术是实现精细化农业的关键技术之一。在作业的过程中,使用纯机械拖拉机操作和控制方法简单,准确性和效率高,其主要依赖于机械传动方式,例如摩擦、齿轮等来传递动力和运动。
2、随着农业机械自动化及智能化水平不断提高,用户对农业机械的自动化程度提出了更高的要求而产生的无人驾驶拖拉机,用于起垄、播种、植保等不同的田间作业过程中,旨在提高农业生产的效率和经济效益,在设置的路径下实现无人化自动驾驶作业,进而能够不需再配备驾驶人员。
3、如何在机械拖拉机中进行无人驾驶以及控制其作业,是值得考虑的问题。
技术实现思路
1、本技术提供一种无人驾驶拖拉机系统及其控制方法,旨在通过无人驾驶拖拉机系统中的控制器发送控制信号给电动推杆,电动推杆通过推动或者拉动离合器、油门、升降机构以及pto开关按钮进行换挡、加减速以及农具升降作业,实现无人驾驶拖拉机简单、精准作业。
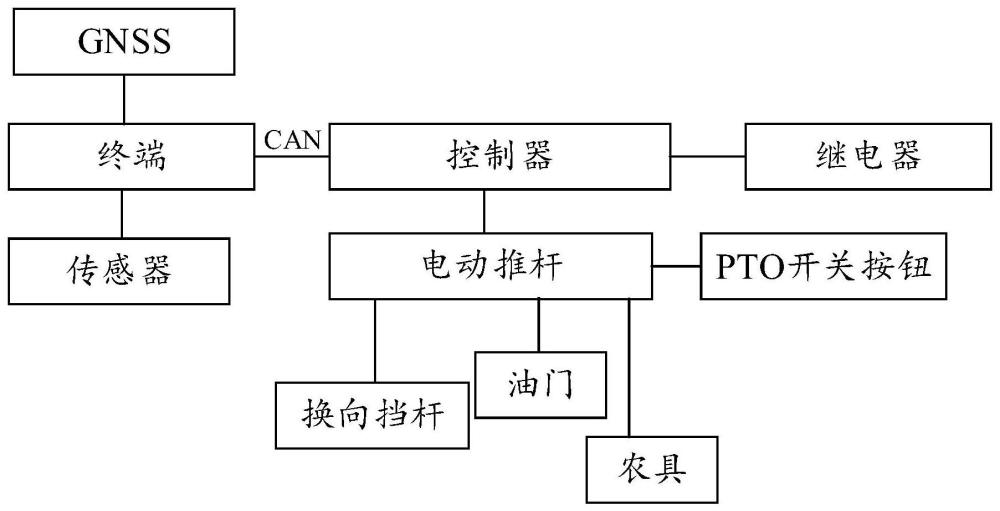
2、第一方面,提供了一种无人驾驶拖拉机系统,该系统包括控制器、电动推杆、终端以及第一部件,其中,第一部件包括换向档杆、油门、升降机构以及pto开关按钮,电动推杆与控制器通信连接,电动推杆包括第一电动推杆、第二电动推杆、第三电动推杆以及第四电动推杆,第一电动推杆的一端焊接所述换向档杆,第二电动推杆的一端焊接油门,第三电动推杆的一端焊接升降机构,第四电动推杆的一端焊接所述pto开关按钮,终端,用于向控制器发送第一信息,控制器,用于接收第一信息,根据第一信息分别向第一电动推杆、第二电动推杆、第三电动推杆以及第四电动推杆发送第一控制信号,电动推杆,用于根据接收到的第一控制信号,对第一部件执行操作,操作包括:第一电动推杆推动或拉动换向档杆控制前进或后退,和/或,第二电动推杆推动或拉动油门控制加速或减速,和/或,第三电动推杆推动或拉动所述升降机构,从而调整农具的高度,和/或,第四电动推杆推动或拉动pto开关按钮控制打开或闭合。
3、基于上述方案,在无人驾驶拖拉机系统中,通过控制器给电动推杆发送第一信息,控制电动推杆的推动或者拉动,使得与其焊接在一起的第一部件进行相应操作,无需通过多个控制单元或者多个物理结构进行无人驾驶系统的控制,仅通过控制器控制电动推杆以及电动推杆与第一部件的连接,实现无人驾驶拖拉机系统的作业,进而实现无人驾驶拖拉机简单、精准作业。
4、应理解,本技术中的电动推杆有4个,分别是第一电动推杆、第二电动推杆、第三电动推杆以及第四电动推杆,其一端通过电焊的方式连接换向档杆、油门、升降机构以及pto开关按钮。
5、结合第一方面,在第一方面的某些实现方式中,第一信息包括通过gnss和惯性导航定位得到所述无人驾驶拖拉机系统的位置信息、速度信息和方向信息,和/或,通过传感器得到农田中的障碍物信息、边界线信息和作物健康状况信息。
6、基于上述方案,通过gnss和惯性导航定位以及传感器得到拖拉机的自身信息以及周围环境信息,将该信息发送至终端,终端根据这些信息向控制器下发控制信号。
7、另外,gnss信号全球覆盖,可以提供全天候高精度的定位服务,不会受农作物的影响。惯性导航不依赖于外界的输入,可以在短暂丢失卫星信号的情况下提供可靠的定位导航。因此,这两种结合的方法可以提供可靠的高精度定位信息。
8、结合第一方面,在第一方面的某些实现方式中,控制器,还用于存储预设的路径点与所述第一部件的状态的对应关系,根据对应关系确定第一控制信号,其中,预设的路径点是根据作业地块的圈地录制确定。
9、基于上述方案,根据预设的路径点与被控部件状态的对应关系,确定出与各个路径点对应的拖拉机上的被控部件的指定状态,并在农机移动过程中由控制器完成自动控制。
10、结合第一方面,在第一方面的某些实现方式中,预设的路径点与第一部件的状态的对应关系,包括根据预设的路径点所在的区域,确定第一部件的状态,包括:预设的路径点所在的区域为作业区域,换向档杆前进,pto开关按钮打开,农具下降,油门增大,或,预设的路径点所在的区域为作业区域,换向档杆前进,pto开关按钮打开,农具下降,不控制油门,或,预设的路径点所在的区域为掉头区域,换向档杆置于空挡位置,pto开关按钮关闭,农具上升,油门减小,或,预设的路径点所在的区域为掉头区域,换向档杆后退,pto开关按钮关闭,农具上升,油门减小。
11、基于上述方案,根据不同的作业区域中预设的路径点与被控部件状态的对应关系,确定出与各个路径点对应的拖拉机上的被控部件的指定状态。例如,在作业区域的某一路径点,对应的第一部件中的农具下降,油门增大,pto开关按钮不控制以及换向档杆不控制;又例如,在掉头区域的某一路径点,对应的第一部件中的农具上升,油门减小,pto开关按钮不控制以及换向档杆前进。
12、结合第一方面,在第一方面的某些实现方式中,该系统还包括继电器,继电器,用于根据接收到的第二控制信号,对无人驾驶拖拉机系统执行远程启停操作。
13、基于上述方案,继电器根据接收到的远程信号,控制继电器的通断状态。当继电器通电时,电路闭合,设备启动;当继电器断电时,电路断开,设备停止。通过远程设备发送控制指令,实现对继电器的远程启动或启停控制。
14、第二方面,提供了一种无人驾驶拖拉机系统的控制方法,应用于无人驾驶拖拉机系统,所述系统包括控制器、电动推杆、终端以及第一部件,其中,第一部件包括换向档杆、油门、升降机构以及pto开关按钮,电动推杆与所述控制器通信连接,电动推杆包括第一电动推杆、第二电动推杆、第三电动推杆以及第四电动推杆,第一电动推杆的一端焊接换向档杆,第二电动推杆的一端焊接油门,第三电动推杆的一端焊接升降机构,第四电动推杆的一端焊接pto开关按钮,该方法包括:终端,用于向控制器发送第一信息,控制器,用于接收第一信息,根据第一信息分别向第一电动推杆、第二电动推杆、第三电动推杆以及第四电动推杆发送第一控制信号,电动推杆,用于根据接收到的第一控制信号,对第一部件执行操作,操作包括:第一电动推杆推动或拉动换向档杆控制前进或后退,和/或,第二电动推杆推动或拉动油门控制加速或减速,和/或,第三电动推杆推动或拉动升降机构,从而调整农具的高度,和/或,第四电动推杆推动或拉动pto开关按钮控制打开或闭合。
15、基于上述方案,在无人驾驶拖拉机系统中,通过控制器给电动推杆发送第一信息,控制电动推杆的推动或者拉动,使得与其焊接在一起的第一部件进行相应操作,无需通过多个控制单元或者多个物理结构进行无人驾驶系统的控制,仅通过控制器控制电动推杆以及电动推杆与第一部件的连接,实现无人驾驶拖拉机系统的作业,进而实现无人驾驶拖拉机简单、精准作业。结合第二方面,在第二方面的某些实现方式中,第一信息包括通过gnss和惯性导航定位得到所述无人驾驶拖拉机系统的位置信息、速度信息和方向信息,和/或,通过传感器得到农田中的障碍物信息、边界线信息和作物健康状况信息。
16、结合第二方面,在第二方面的某些实现方式中,所述控制器,还用于存储预设的路径点与所述第一部件的状态的对应关系,根据对应关系确定第一控制信号,其中,预设的路径点是根据作业地块的圈地录制确定。
17、基于上述方案,通过gnss和惯性导航定位以及传感器得到拖拉机的自身信息以及周围环境信息,将该信息发送至终端,终端根据这些信息向控制器下发控制信号。
18、另外,gnss信号全球覆盖,可以提供全天候高精度的定位服务,不会受农作物的影响。惯性导航不依赖于外界的输入,可以在短暂丢失卫星信号的情况下提供可靠的定位导航。因此,这两种结合的方法可以提供可靠的高精度定位信息。
19、结合第二方面,在第二方面的某些实现方式中,预设的路径点与第一部件的状态的对应关系,包括根据预设的路径点所在的区域,确定第一部件的状态,包括:预设的路径点所在的区域为作业区域,换向档杆前进,pto开关按钮打开,农具下降,油门增大,或,预设的路径点所在的区域为作业区域,换向档杆前进,pto开关按钮打开,农具下降,不控制油门,或,预设的路径点所在的区域为掉头区域,换向档杆置于空挡位置,pto开关按钮关闭,农具上升,油门减小,或,预设的路径点所在的区域为掉头区域,换向档杆后退,pto开关按钮关闭,农具上升,油门减小。
20、基于上述方案,根据不同的作业区域中预设的路径点与被控部件状态的对应关系,确定出与各个路径点对应的拖拉机上的被控部件的指定状态。例如,在作业区域的某一路径点,对应的第一部件中的农具下降,油门增大,pto开关按钮不控制以及换向档杆不控制;又例如,在掉头区域的某一路径点,对应的第一部件中的农具上升,油门减小,pto开关按钮不控制以及换向档杆前进。
21、结合第二方面,在第二方面的某些实现方式中,该系统还包括继电器,该方法还包括:继电器,用于根据接收到的第二控制信号,对无人驾驶拖拉机系统执行远程启停操作。
22、基于上述方案,继电器根据接收到的远程信号,控制继电器的通断状态。当继电器通电时,电路闭合,设备启动;当继电器断电时,电路断开,设备停止。通过远程设备发送控制指令,实现对继电器的远程启动或启停控制。
23、第三方面,提供了一种计算机可读存储介质,包括计算机程序,当其在计算机设备上运行时,使得所述计算机设备中的处理单元执行第一方面或第一方面的任意可能的实现方式中的方法的指令。
24、第四方面,提供了一种计算机程序产品,包括计算机程序指令,该计算机程序指令使得计算机执行上述第一方面或第一方面的各实现方式中的方法。
25、第五方面,提供了一种计算机程序,当其在计算机上运行时,使得计算机执行上述第一方面或第一方面的任一可能的实现方式中的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198270.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表