基于事件驱动机制的非光滑三维协同制导律与系统
- 国知局
- 2024-07-31 23:47:52
本发明涉及协同制导,更具体的说是涉及基于事件驱动机制的非光滑三维协同制导律与系统。
背景技术:
1、多弹协同制导运用现代通信方法,使弹群构成通信网络且邻居之间的状态信息可相互传递,从而协调导弹到达目标时间,最终实现同时命中目标。制导律的设计与一致性变量的选取紧密相关,一致性变量包括分为剩余时间估计和弹目相对距离。剩余时间估计以直观性广受青睐,然而,当目标的机动性或外界扰动不可忽略的情况下,剩余时间估计与实际值的误差较大,会造成协同任务失败。随着传感器技术的进步,弹目相对距离的测量精度较高,将弹目相对距离作为一致性变量,使相对距离在时间上达到一致,同样能够实现同时命中,也避免了命中时间估计误差。
2、实际应用中,传统的控制信号采样为时间驱动,即以等时间间隔进行控制信号采样,造成了大量的控制更新,减少了控制器的寿命。为了改进这一点,本发明引入了事件驱动机制。事件驱动机制的核心思想是,在保证制导任务成功的前提下,只在某个事件触发时更新,其余时间保持不变。相比时间驱动,事件驱动大幅降低了控制频次,进而减少了燃料消耗。因此,基于事件驱动机制的非光滑三维协同制导律有着显著的工程意义。
3、因此,如何设计基于事件驱动的协同制导律,协调导弹到达目标时间和角度,提高多弹协同命中目标的准确度是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于事件驱动机制的非光滑三维协同制导律与系统,使用弹目距离作为协调变量,设计了基于事件驱动机制的非光滑三维协同制导律,使得弹目相对距离一致性误差在有限时间内收敛到零附近的邻域,同时使得视线倾角和视线偏角收敛到期望的角度,保证了导弹不脱靶。此外,本发明为制导律设计相应的触发函数,降低了控制频次,节省了燃料消耗。
2、为了实现上述目的,本发明采用如下技术方案:
3、基于事件驱动机制的非光滑三维协同制导律,包括以下方法:
4、步骤1:获取导弹和目标的相对运动信息,建立导弹与目标的相对运动方程,根据导弹与目标的相对运动方程构建导弹与目标的三维动力学模型;
5、步骤11:获取导弹和目标的相对运动信息,建立导弹与目标的相对运动方程,表示为:
6、
7、
8、
9、其中,ri、εi、βi分别表示相对运动信息中导弹和目标的相对距离、视线倾角和视线偏角;分别表示目标在视线方向、俯仰方向和偏航方向的加速度分量;分别表示导弹i在视线方向、俯仰方向和偏航方向的加速度分量;
10、步骤12:根据导弹和目标的相对运动信息构建新的状态变量,表示为:
11、
12、其中,表示导弹和目标的相对速度;表示视线倾角导数;表示视线偏角导数;分别表示视线倾角期望和视线偏角期望;
13、步骤13:根据相对运动方程和新的状态变量构建导弹与目标的三维动力学模型,表示为:
14、
15、
16、其中,分别为导弹与目标的三维动力学模型的非线性项;分别表示目标在视线方向、俯仰方向和偏航方向的加速度分量
17、步骤2:根据导弹和目标的相对运动信息构建有限时间扰动观测器,利用有限时间扰动观测器获得目标在视线方向、俯仰方向和偏航方向的加速度分量;
18、步骤21:建立视线方向的有限时间观测器,以观测目标在视线方向的加速度分量dri:
19、
20、其中,是对x2i的估计,是目标机动dri的估计;lr是目标在视线方向的加速度分量的上界,即σ1>0,σ2>0分别为观测器系数;sigγ(x)=sign(x)|x|γ,γ>0,sign(·)为符号函数;
21、步骤22:建立俯仰方向的有限时间观测器,以观测目标在俯仰方向的加速度分量dεi,表示为:
22、
23、其中,表示相对速度俯仰方向分量;是对的估计;是目标在俯仰方向的加速度分量dεi的估计;lε是的上界,即
24、步骤23:建立偏航方向的有限时间观测器,以观测目标在偏航方向的加速度分量dβi,表示为:
25、
26、其中,表示相对速度偏航方向分量,对的估计;是目标机动的估计;lβ>0为目标在偏航方向的加速度分量导数上界;
27、步骤3:利用弹群间的通信图,根据导弹与目标的三维动力学模型和加速度分量构建视线方向、俯仰方向和偏航方向的三维协同制导律,使弹群以期望的视线倾角和视线偏角同时命中目标;
28、步骤31:根据导弹与目标的三维动力学模型设置视线方向的三维协同制导律,表示为:
29、
30、
31、
32、
33、其中,α1>0,α2>0,α3>0,α4>0,γ∈(0,1),μ1>>1,分别为制导律参数;为相对距离一致性误差,x1i表示第i枚导弹和目标之间的剩余距离,x1j表示第j枚导弹和目标之间的剩余距离;为相对速度视线分量一致性误差;aij为导弹之间的通信图g=(v,e)所对应的邻接矩阵分量,其中v={1,...,n}为顶点集合,为边集;邻接矩阵a=[aij],aii=0,aij=aji>0,i≠j;为指定的相对速度视线分量的收敛值;
34、步骤32:根据导弹与目标的三维动力学模型设置俯仰方向的三维协同制导律,表示为:
35、
36、其中,s1i表示滑模面,s1i=x3i+ρsigτ(x4i);ρ>0,τ∈(1,2),分别为滑模面参数;ν1>0,ν2>0,μ2>>1,分别为制导律参数;
37、步骤33:根据导弹与目标的三维动力学模型设置偏航方向的三维协同制导律,表示为:
38、
39、其中,s2i表示滑模面,s2i=x5i+ρsigτ(x6i);ν3>0,v4>0,μ2>>1,分别为制导律参数;
40、步骤4:选择事件触发函数计算三维协同制导律的控制触发时刻序列,结合三维协同制导律构建基于事件驱动的非光滑三维协同制导律,对导弹进行控制,从而满足达成制导任务且降低控制频次的需求;
41、步骤41:根据视线方向的三维协同制导律,建立视线方向的基于事件驱动机制的非光滑三维协同制导律,表示为:
42、
43、视线方向的控制触发时刻序列为:
44、
45、其中,ηr>0,ωr>0,分别为非光滑三维协同制导律参数;由有限时间收敛理论,弹目相对距离将在有限时间内达到一致,且误差控制在零附近的邻域内;
46、步骤42:根据俯仰方向的三维协同制导律,建立俯仰方向的基于事件驱动机制的非光滑三维协同制导律,表示为:
47、
48、俯仰方向的控制触发时刻序列为:
49、
50、其中,ηε>0,ωε>0,分别为非光滑三维协同制导律参数;由有限时间收敛理论,视线倾角与期望视线倾角之差x3i与视线倾角速率x4i将在有限时间内收敛到零附近的邻域内;
51、步骤43:根据偏航方向的三维协同制导律,建立偏航方向的基于事件驱动机制的非光滑三维协同制导律,表示为:
52、
53、偏航方向的控制触发时刻序列为:
54、
55、其中,ηβ>0,ωβ>0,分别为非光滑三维协同制导律参数;由有限时间收敛理论,视线偏角与期望视线偏角之差x5i与视线偏角速率x6i将在有限时间内收敛到零附近的邻域内。
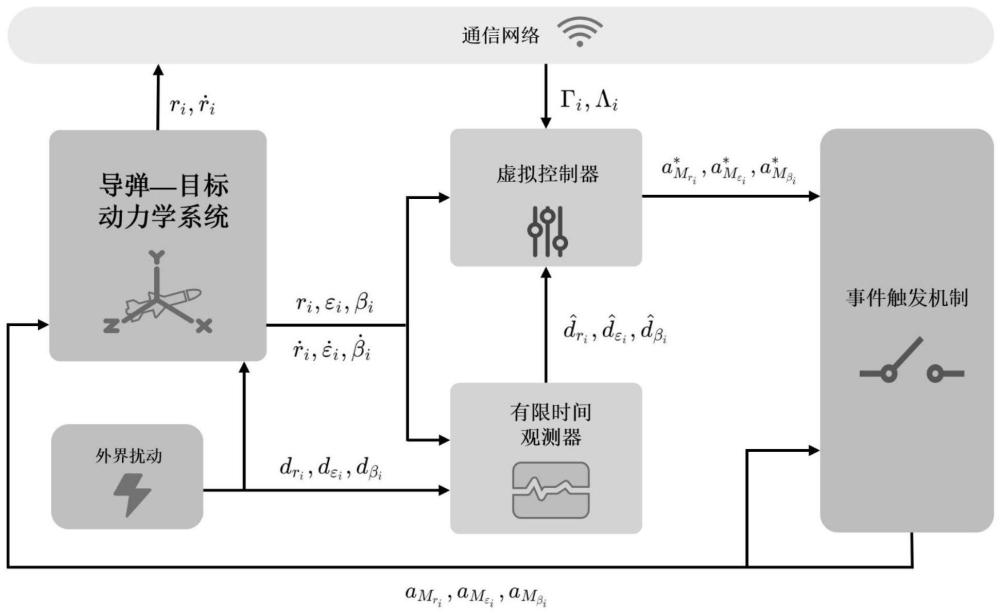
56、基于事件驱动机制的非光滑三维协同制导系统,包括模型构建模块、观测器模块、三维协同制导模块和事件驱动制导模块;
57、模型构建模块,获取导弹和目标的相对运动信息,建立导弹与目标的相对运动方程,根据导弹与目标的相对运动方程构建导弹与目标的三维动力学模型;
58、观测器模块,根据导弹和目标的相对运动信息构建有限时间扰动观测器,利用有限时间扰动观测器获得目标在视线方向、俯仰方向和偏航方向的加速度分量;
59、三维协同制导模块,利用弹群间的通信图,根据导弹与目标的三维动力学模型构建视线方向、俯仰方向和偏航方向的三维协同制导律;
60、事件驱动制导模块,选择事件触发函数计算三维协同制导律的控制触发时刻序列,结合三维协同制导律构建基于事件驱动的非光滑三维协同制导律,对导弹进行控制。
61、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于事件驱动机制的非光滑三维协同制导律与系统,通过选取导弹与目标的距离、相对速度、攻击角度及其导数作为状态变量,把导弹与目标的相对动力学方程转换为二阶系统,利用有限时间观测器观测机动目标的加速度带来的视线方向、俯仰方向和偏航方向的扰动,再设计导弹的加速度与基于事件触发的更新条件,使弹群以不同的攻击角度同时命中目标。与传统制导律相比:第一,本发明提出了一种基于事件驱动的非光滑三维协同制导律,使一致性变量在有限时间内收敛,且降低了控制频次。第二,该制导律的一致性变量是弹目相对而非剩余时间估计,避免了外界扰动带来的时间估计误差。第三,本发明设计了一种有限时间观测器,能够快速估计目标加速度,提高了制导律的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198560.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表