多无人车群组规模自适应分组的终端时间协同控制方法
- 国知局
- 2024-07-31 23:51:30
本发明属于多智能体控制领域,尤其是涉及多无人车群组规模自适应分组的终端时间协同控制方法。
背景技术:
1、随着群体智能技术的发展,多无人车协同作业已成为热点研究方向。为充分发挥协同优势和最大化任务执行效益,无人车群组协同控制往往需要考虑时间约束条件和效率。以森林救火应急工程为例,当单个无人车因载荷有限,无法释放足够的灭火材料以抑制火势时,需要不低于一定规模数量的无人车前往火场区域协同作业,同时释放灭火材料。在此背景下,对无人车群组施加协同运动控制,协调各无人车抵达目标位置的终端时间,使其同时抵达火场区域,可有效减少各无人车在火场区域的停留时间,降低先行抵达火场区域的无人车在等待过程中所面临损伤的风险。然而,受制于各无人车的初始位置部署和运动性能,其终端时间一致性可能无法实现。因此,有必要开展基于群组规模自适应分组的多无人车终端时间协同控制研究,使各组无人车可同时抵达目标位置,同时满足任务驱动下的群组规模数量要求。
2、目前,关于群组终端时间协同控制方法的文献相对较少,主要集中在弹群饱和攻击问题研究上。例如,使用比例导引法来估计导弹命中目标的剩余时间,并将估计时间作为输出以实现一致性,已有的技术如[1](参见jialingzhou and jianyingyang.distributedguidance law design for cooperative simultaneous attacks with multiplemissiles[j].journal of guidance,control,and dynamics,2016,39(10):2439-2447.);或者,通过各导弹的弹目距离趋同来实现同时命中目标,已有的技术如[2](参见jun zhou,yang wang,and bin zhao.impact-time-control guidance law for missile withtime-varying velocity[j].mathematical problems in engineering,2016,4:1-14)。现有技术主要关注多智能体同时到达目标位置的问题,但在时间域上通过群组划分实现多个独立群组各自抵达目标位置的问题尚待解决。
3、本专利提出了一种多无人车群组规模自适应分组的终端时间协同控制方法,能够实时自组织协调无人车运动并且具有强鲁棒性的特点,有效地避免了因恶劣环境造成任务失败的问题。多无人车群组规模自适应分组的终端时间协同控制方法可应用于无人系统群组协同救火等任务,具有广泛的实际应用价值。
技术实现思路
1、本发明的目的是提供多无人车群组规模自适应分组的终端时间协同控制方法,解决在时间域上通过群组划分实现多个独立群组各自抵达目标位置的问题。
2、为实现上述目的,本发明提供多无人车群组规模自适应分组的终端时间协同控制方法,包括以下步骤:
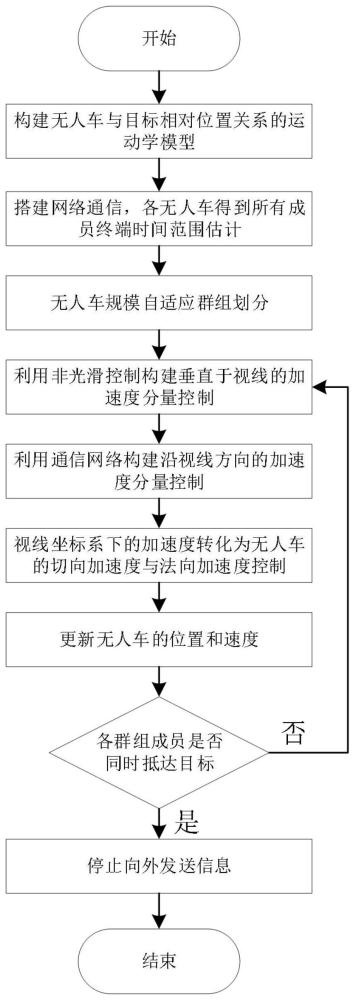
3、步骤1、构建无人车与目标位置之间的相对运动学模型;
4、步骤2、根据步骤1构建的相对运动学模型,计算各无人车的终端时间估计,并通过速度限制确定各无人车的终端时间范围估计;
5、步骤3、构建各无人车之间的通信网络结构,使各无人车进行多次信息交互,得到全体无人车的终端时间范围估计;
6、步骤4、根据各无人车终端时间范围估计和各群组中所需的最少无人车规模数量,确定各群组无人车的时间范围可达域,完成无人车规模自适应群组划分;
7、步骤5、在步骤1构建的相对运动学模型的基础上,利用非光滑控制构建垂直于视线方向的加速度分量控制,使各无人车垂直于视线方向的速度分量在期望时间内收敛为零;
8、步骤6、根据步骤1构建的相对运动学模型及无人车之间的信息交互,建立沿视线方向的加速度分量控制;
9、步骤7、根据步骤3中的通信网络结构和步骤4中的无人车的分组情况及步骤5和步骤6建立的垂直于视线方向和沿视线方向的加速度控制方案,构建无人车的加速度与角加速度控制方案;
10、步骤8、根据步骤1构建的相对运动学模型及步骤3中的通信网络结构,更新无人车的位置和速度,判断各群组内无人车是否同时到达目标位置,若各群组内无人车同时抵达目标位置,则停止对外发送信息;若各群组内无人车没有同时抵达目标位置,则将各群组落后的无人车重新进行群组划分,返回步骤5继续执行。
11、优选的,步骤1的具体过程如下:
12、在惯性坐标系下,针对无人车群组对无人车建立如下运动学模型:
13、
14、其中,为无人车质心的位置坐标,θi为无人车i的航向角,具体为速度与x轴正方向夹角,ωi为无人车航向角变化速率,vi为无人车速度,aq,i与af,i分别表示无人车i的切向加速度与法向加速度;
15、假设目标位置为(x#,y#),则无人车i与目标的相对位置关系通过以下运动模型描述:
16、
17、其中,为无人车i与目标位置间的距离,λi=atan2(x#-x*i,y#-y*i)为无人车i的视线角,φi为无人车i的前置角,根据相对位置的运动学模型,进一步建立相对位置与控制输入的关系模型如下:
18、
19、其中,uy,i=aq,icosφi-af,isinφi,uc,i=aq,isinφi-af,icosφi分别表示无人车沿视线方向和垂直于视线方向的加速度控制输入。
20、优选的,步骤2中通过速度限制确定各无人车的终端时间范围估计的具体表达式如下:
21、
22、其中,和分别为无人车从初始位置抵达目标位置的所需要的最短时间估计和最长时间估计,为无人车可实现的速度范围。
23、优选的,步骤3中全体无人车的终端时间范围估计的具体过程如下:
24、s31、构建通信网络结构其中包括以各无人车为顶点的集合以及表示无人车通信交互关系的边集合
25、s32、在通信网络结构中,无人车i向邻居j∈ni发送自身终端时间范围估计,并接收邻居j的终端时间范围估计,经过n-1次信息交互后,各无人车获得所有无人车的终端时间范围估计,其中,ni为无人车i的邻居集合。
26、优选的,步骤4中由各无人车的终端时间范围估计和各群组中所需的最少无人车规模数量,得到各群组无人车时间范围可达域进行无人车规模自适应群组划分,具体操作如下:
27、s41、将各无人车终端时间范围上界进行升序排序,m=1,2,…n,并将无人车从1到n进行重新编号,满足
28、s42、令s=1,将无人车n至无人车ks=n-p+1归入到第1群组中,p为各群组中所含无人车最少数量,假设第一组时间范围可达域不为空集;
29、s43、判断此时未分组无人车数量是否大于p;
30、s431、若此时未分组无人车数量仍大于p,则更新s=s+1,ks=ks-1-p,判断是否为空集;
31、s4311、如果不为空集,则将编号ks-1-1至ks无人车划分为第s群组,跳转至s43;
32、s4312、若为空集,则令ks-1=ks-1-1,ks=ks-1,将无人车ks-1纳入到第s-1群组,无人车ks纳入到第s群组,判断是否为空集,跳转至s4311;
33、s432、若此时剩余无人车数量小于p,则进入群组数量反向调节部分,跳转至s44;
34、s44、令ks=1,h=s,h为划分后的群组数量,判断是否为空集;
35、s441、若不为空集,则将无人车ks-1-1至无人车ks正式划分为第s群组,跳转至s45;
36、s442、若为空集,则令ks-1=ks-1-1,将无人车ks-1划分到第s-1群组,判断是否为空集,跳转至s441;
37、s45、判断是否遍历所有无人车,s是否大于1;
38、s451、若s大于1,令s=s-1,判断是否为空集,跳转至s441;
39、s452、若s不大于1,跳转至s46;
40、s46、完成无人车群组划分
41、优选的,步骤5中采用非光滑控制方法来构建垂直于视线方向的加速度控制的具体表达式如下:
42、
43、其中,gi,ac,i,bc,i>0为常参数,且满足0<ac,i<1<bc,i,sgnβ(·)具体为:
44、sgnβ(x)=|x|βsign(x)
45、其中,sign(·)为符号函数。
46、优选的,步骤6中建立沿视线方向的加速度分量控制的具体表达式如下:
47、
48、其中,li>0为收敛系数,aij表示通信拓扑邻接矩阵的元,其中,aii=0,如果无人车i接受无人车j所发出的信息,则aij>0,否则aij=0。
49、优选的,步骤7中构建无人车的加速度与角加速度控制方案的具体过程如下:
50、s71、通过构建的通信网络结构满足无人车i到邻居无人车j均存在连通路径;
51、s72、若无人车j已抵达目标或者两者不在同一群组内,则停止发送信息,aij=0,
52、s73、无人车i加速度与角加速度控制如下表示:
53、
54、其中
55、
56、优选的,步骤8中根据变量χ的取值判断同一群组中的无人车是否全部抵达目标位置,具体表达式如下:
57、
58、其中,rs,i代表第s群组中编号为i的无人车当前位置与目标位置之间的距离;当χ=1,则表示第s群组中无人车全部抵达目标位置;当χ=0,则表示第s群组中无人车没有全部抵达目标位置。
59、因此,本发明采用上述一种多无人车群组规模自适应分组的终端时间协同控制方法,具有以下有益效果:
60、(1)本发明通过给定目标位置和各群组中所含最少无人车规模数量,实现了无人车群组以不少于指定规模自动进行分组以及各小组内无人车协同作业的任务;
61、(2)本发明采用的方法可满足无人车协同的要求,并且具备良好的鲁棒性,通过通信网络,可以实时自组织协调无人车运动,确保无人车在自主分组的同时,各小组内的无人车同时抵达目标位置。
62、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198868.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表