基于开普勒优化-神经网络PID的电子离合器位置控制法
- 国知局
- 2024-07-31 23:52:10
本发明属于自动控制,具体涉及一种基于开普勒优化-神经网络pid的电子离合器位置控制法。
背景技术:
1、pid控制器是一种不依赖于被控对象的数学模型的控制器,它具有稳定性良好、易于实现和抗干扰能力强等优点,因此在工业控制中得到了广泛应用。然而,传统的pid控制方法中控制参数为固定值,这使得在面对具有较强非线性和时变性的系统时,难以满足较高的控制要求。此外,pid控制器的参数整定是一件比较困难的事情,因为需要手动调整参数以适应不同的系统和任务,对参数调节的要求较高,且对系统的稳定性要求也较为严格。
2、为解决上述问题,可考虑采用自适应pid控制策略,该策略能根据系统输入和输出信号自动调整控制参数,以适应系统动态变化。bp神经网络被引入到pid控制系统中,以优化pid参数整定。bp神经网络具有逼近复杂非线性关系、强大信息综合能力和适应严重不确定系统动态特性的能力,在pid控制器设计中发挥重要作用。然而,采用bp神经网络设计的bp神经网络pid控制系统面临学习效率低、收敛速度慢、全局搜索能力弱和易陷入局部最优等挑战,控制效果不理想,限制了神经网络在pid控制器中的应用。
3、为提升神经网络pid的控制效果,可采用参数优化算法来优化神经网络的权重系数,以提升训练效率和训练质量。而常用的遗传算法、粒子群算法和模拟退火算法等优化算法,在大范围内进行搜索时表现良好,但它们往往只能在大范围内进行搜索,难以通过局部搜索精确地逼近最优解。此外,全局搜索算法通常需要进行大量的迭代和计算,导致计算量较大。同时,这些算法对参数的选择非常敏感,参数调整不当可能会严重影响算法的性能,甚至可能导致算法陷入局部最优。
技术实现思路
1、本发明的目的在于提供一种基于开普勒优化-神经网络pid的电子离合器位置控制法,能在解空间中快速收敛到全局最优解,避免陷入局部最优,从而提高电子离合器位置控制的精确性和稳定性。
2、一种基于开普勒优化-神经网络pid的电子离合器位置控制法,包括以下步骤:
3、步骤1、获取历史输入集和历史输出集,具体包括:
4、对电子离合器历史时刻的位置误差e(x)进行采样并处理,获取包含位置误差e(x)、误差的变化率和误差的积分三类数据的历史输入集;x代表时刻;
5、其中,位置误差e(x)为目标位置与实际位置的差值;
6、对电子离合器历史时刻的pid控制器的比例系数kp、积分系数ki、微分系数kd进行采样,以获取历史输出集;
7、其中,历史输入集和历史输出集构成训练集;
8、步骤2、建立并对循环神经网络模型进行初始化,之后利用步骤1中的训练集训练循环神经网络模型;
9、其中,初始化包括对循环神经网络模型、各层权重矩阵u、v和w分别进行初始化;
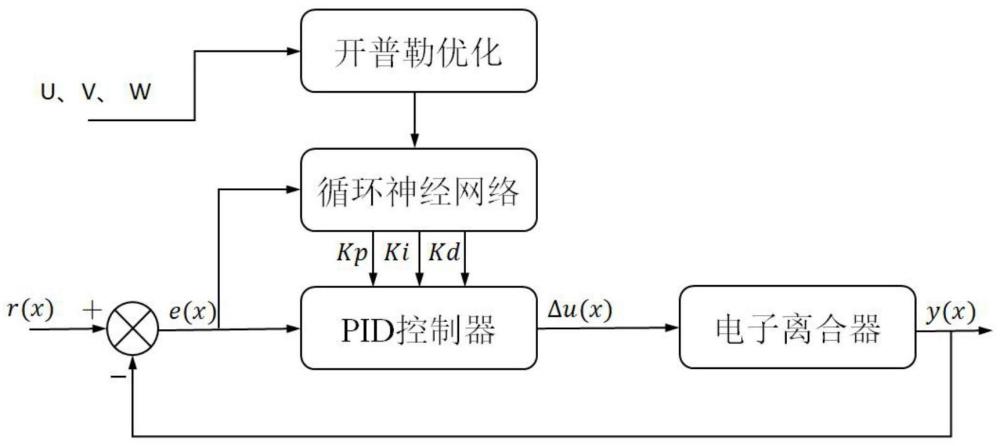
10、步骤3、利用开普勒优化算法koa修正各层权重矩阵u、v和w,得到优化的循环神经网络模型;
11、步骤4、对电子离合器当前时刻的位置误差e(x)进行采样并处理,获得当前采样数据,将当前采样数据输入至步骤3优化的循环神经网络模型,优化的循环神经网络模型输出当前时刻的pid控制器中的比例系数kp、积分系数ki、微分系数kd;
12、步骤5、pid控制器根据当前时刻的比例系数kp、积分系数ki、微分系数kd,计算控制量以对电子离合器的位置进行控制。
13、优选地,步骤2具体包括:
14、步骤21、建立包含输入层、隐含层和输出层的三层结构的循环神经网络模型并进行初始化;
15、所述循环神经网络模型包含3个输入节点,3个隐含节点和3个输出节点;
16、步骤22、利用步骤1得到的训练集训练循环神经网络模型,所述3个输入节点的输入均包括位置误差e(x)、误差的变化率和误差的积分;
17、所述3个输出节点的输出均包括汽车底盘电子离合器的pid控制器中的比例系数kp、积分系数ki、微分系数kd。
18、优选地,步骤3中,以各层权重矩阵u、v和w做为行星。
19、优选地,步骤5中控制量的计算模型为:
20、u(x)=u(x-1)+δu(x),
21、δu(x)=kp(e(x)-e(x-1))+kie(x)+kd(e(x)+2e(x-1)+e(x-2)),
22、其中,δu(x)表示第x次的控制增量;
23、e(x)、e(x-1)、e(x-2)分别表示第x包括、第x-1时刻和第x-2次的位置误差值。
24、与现有技术相比,本发明的优点为:
25、1、开普勒优化算法koa能使循环神经网络pid迅速收敛到全局最优解,采用优化后的网络系数,使得循环神经网络能输出最优的pid控制参数,可以更精确地控制电子离合器的位置,提高了控制的准确性和稳定性。
26、2、将单一循环神经网络和pid控制算法相结合,相比于多个神经网络的共同作用,该循环神经网络收敛速度快且稳定;同时其能捕捉序列数据中的时间依赖性,提升控制的鲁棒性和自适应性。
27、3、开普勒优化算法、单一循环神经网络和pid控制器协同作用,提高了控制的准确性和稳定性。具体的:开普勒优化算法优化循环神经网络的权重矩阵,优化后循环神经网络输出最优的pid控制参数,从而pid控制器输出高精度的控制量。
28、4、对于电子离合器位置这类非线性控制的问题,循环神经网络pid能够根据不同的工况和环境条件进行自适应调整,提高了系统的适应性和鲁棒性。
技术特征:1.一种基于开普勒优化-神经网络pid的电子离合器位置控制法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于开普勒优化-神经网络pid的电子离合器位置控制法,其特征在于,步骤2具体包括:
3.根据权利要求1所述的基于开普勒优化-神经网络pid的电子离合器位置控制法,其特征在于,步骤3中,以各层权重矩阵u、v和w做为行星。
4.根据权利要求1所述的基于开普勒优化-神经网络pid的电子离合器位置控制法,其特征在于,步骤5中控制量的计算模型为:
技术总结本发明提出了一种基于开普勒优化‑神经网络PID的电子离合器位置控制法,包括以下步骤:步骤1、获取历史输入集和历史输出集;步骤2、建立并对循环神经网络模型进行初始化,之后利用步骤1中的训练集训练循环神经网络模型;步骤3、利用开普勒优化算法KOA修正各层权重矩阵U、V和W,得到优化的循环神经网络模型;步骤4、对电子离合器当前时刻的位置误差e(x)进行采样并处理,获得当前采样数据,将当前采样数据输入至步骤3优化的循环神经网络模型,优化的循环神经网络模型输出当前时刻的PID控制器中的比例系数Kp、积分系数Ki、微分系数Kd;步骤5、PID控制器根据当前时刻的比例系数Kp、积分系数Ki、微分系数Kd,计算控制量以对电子离合器的位置进行控制。本发明能在解空间中快速收敛到全局最优解,避免陷入局部最优,从而提高电子离合器位置控制的精确性和稳定性。技术研发人员:吴光强,骆启瑞,毛瑞驰,刘思宇,鞠丽娟受保护的技术使用者:同济大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/198908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表