基于RSMA的多无人机辅助数据采集系统优化方法
- 国知局
- 2024-07-31 23:51:37
本发明属于无线通信领域,具体涉及基于rsma的多无人机辅助数据采集系统优化方法。
背景技术:
1、随着物联网(iot)的快速发展,需要收集数据的物联网设备越来越多。然而,像语音识别、增强现实等物联网领域的智能移动应用是计算密集型和资源密集型应用程序,需要从设备收集大规模数据。为了解决这一问题,无人机(uav)由于其广泛的覆盖范围和高机动性,为物联网数据收集提供了新的机会。特别是,无人机可以灵活快速地部署在感兴趣的领域,为地面设备提供实时服务,这大大降低了设备的能耗。rsma (rate splittingmultiple access) 是一种非正交多址接入技术,通过分配公有信息和私有信息来提高系统效率和减少干扰。rsma作为noma(non-orthogonal multiple access)技术的扩展,具有更大的灵活性,克服了noma在解码复杂度和干扰管理方面的局限性。因此,在无人机辅助数据采集系统中采用rsma技术可以进一步提高数据采集性能,为此提出基于rsma的多无人机辅助数据采集系统优化方法。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供基于rsma的多无人机辅助数据采集系统优化方法,解决了现有技术中的问题。
2、本发明的目的可以通过以下技术方案实现:
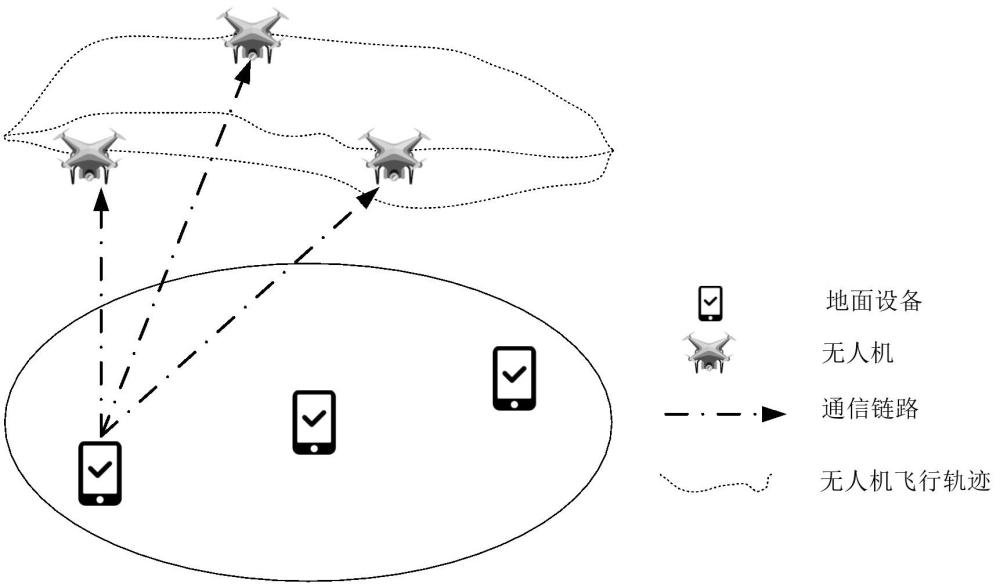
3、基于rsma的多无人机辅助数据采集系统优化方法,所述多无人机辅助数据采集系统包括个m个无人机和k个地面设备,m个无人机采用rsma方式在带宽为b的单一频段中从k个地面设备收集数据,所述优化方法以下步骤:
4、s1,构建多无人机辅助数据采集系统初始模型;
5、s2,设置迭代次数变量,迭代终止精度,给定多无人机初始化飞行轨迹和地面设备初始化发射功率;
6、s3,在给定无人机飞行轨迹和地面设备发射功率的条件下,基于sca方法优化多无人机辅助数据采集系统初始模型,获得最优的多无人机飞行轨迹,并且作为下一次迭代的输入;
7、s4,在给定无人机飞行轨迹和地面设备发射功率的条件下,基于sca方法优化多无人机辅助数据采集系统初始模型,获得最优的地面设备发射功率,并且作为下一次迭代的输入;
8、s5,基于bcd方法将最优的多无人机飞行轨迹和地面设备发射功率代入s3,并更新迭代次数变量,重复s3到s4,直到多无人机辅助数据采集系统初始模型满足收敛条件,迭代终止,获得无人机辅助数据采集系统模型的最优解。
9、进一步地,所述多无人机辅助数据采集系统初始模型为:
10、
11、
12、
13、
14、
15、
16、
17、
18、其中,,;为地面设备k在时隙n内公有部分的发射功率,为地面设备k在时隙n内私有部分的发射给无人机m的功率;为无人机m的飞行轨迹;为无人机的飞行时间,n为无人机飞行时间划分的时隙数目;每个时隙的宽度;c1限制无人机在飞行时间t内从初始点飞行至终点;c2限制无人机的最大飞行速度,为在第n个时隙内无人机m在水平面上的投影坐标,为在第n-1个时隙内无人机m在水平面上的投影坐标,为无人机的最大速度;c3限制无人机间的最小距离以防止发生碰撞,为无人机之间最小距离;c4保证满足在无人机m上成功实现sic操作,为sic解码灵敏度,表示在无人机处的噪声;c5限制每个地面设备的发射功率不大于最大发射功率,为设备的最大发射功率;c6限制优化变量的可行范围;c7保证每个地面设备采集的数据量,满足最小要求,其中为设备的最小采集数据量。
19、进一步地,目标函数为:
20、
21、
22、
23、
24、其中,为设备k在时隙n内的上传公有部分传输速率取值,为设备k在时隙n内向无人机m上传公有部分的传输速率,为设备k在时隙n内向无人机m上传私有部分的传输速率;b表示通信带宽,表示为地面设备k在时隙n内于无人机m之间的信道增益,其中表示参考距离为1m时的信道增益,表示在无人机处的噪声。
25、进一步地,将无人机飞行时间离散化为n个时隙,在每个时隙中,k个地面设备将采集到的数据以时分多址方式上传到m个无人机。
26、基于rsma的多无人机辅助数据采集系统优化单元,包括:模型构建模块:构建多无人机辅助数据采集系统初始模型;
27、初始参数给定模块:设置迭代次数变量,迭代终止精度,给定多无人机初始化飞行轨迹和地面设备初始化发射功率;
28、第一次优化模块:在给定无人机飞行轨迹和地面设备发射功率的条件下,基于sca方法优化多无人机辅助数据采集系统初始模型,获得最优的多无人机飞行轨迹,并且作为下一次迭代的输入;
29、第二次优化模块:在给定无人机飞行轨迹和地面设备发射功率的条件下,基于sca方法优化多无人机辅助数据采集系统初始模型,获得最优的地面设备发射功率,并且作为下一次迭代的输入;
30、以及,迭代模块:基于bcd方法将最优的多无人机飞行轨迹和地面设备发射功率代入第一次优化模块,并更新迭代次数变量,重复第一次优化模块到第二次优化模块,直到多无人机辅助数据采集系统初始模型满足收敛条件,迭代终止,获得多无人机辅助数据采集系统模型的最优解;
31、其中,所述多无人机辅助数据采集系统包括m个无人机和k个地面设备,m个无人机采用rsma方式在带宽为b的单一频段中从k个地面设备收集数据。
32、一种计算机存储介质,存储有可读程序,当程序运行时,能够执行上述的基于rsma的多无人机辅助数据采集系统优化方法。
33、一种电子设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
34、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行上述的基于rsma的多无人机辅助数据采集系统优化方法对应的操作。
35、一种计算机程序产品,包括计算机指令,所述计算机指令指示计算设备执行上述的基于rsma的多无人机辅助数据采集系统优化方法对应的操作。
36、本发明的有益效果:
37、1、本发明涉及基于系统吞吐量最大化的多无人机辅助数据采集系统优化方法,包括m个无人机和k个地面设备,且地面设备都有大量的数据需要通过rsma上传到多个无人机,以满足其最小的采集数据需求;本发明在最大设备发射功率约束和最小采集数据约束下,研究了多无人机飞行轨迹和设备发射功率的联合优化,以实现系统吞吐量最大化的问题,提出了一种基于块坐标下降法和逐次凸逼近法的迭代算法。
38、2、本发明提出了一种新的基于rsma的多无人机辅助数据采集系统框架,以往所提出的无人机辅助数据采集系统框架没有考虑地面设备产生大量数据的情况,本发明提出的框架可以更灵活和便捷的适应特殊应用场景,并且提高系统采集的数据量;本发明考虑多个无人机基于rsma方式对地面设备采集数据,以在满足地面设备最小采集数据量和发射功率的限制下最优化系统采集的数据总量为目标,对多无人机飞行轨迹和地面设备发射功率进行联合优化。
39、3、由于所提出的优化问题是非凸的并且难以解决,因此,本发明通过块坐标下降法(bcd)和连续凸近似技术(sca)求解两个子问题;两个子问题的两个变量分别对应两个块,即无人机轨迹q和地面设备发射功率p;在保持另一个块变量不变的情况下,通过基于sca方法求解两个子问题,交替优化这两个子问题的优化变量;并且每次迭代得到的解将作为下一次迭代的输入。
40、4、提出的基于sca和bcd的算法的收敛性是可以保证的,所需的复杂度较低,仿真结果显示无人机在不同场景下的优化轨迹,以及与现有方案相比,如非正交多址接入(noma)方案、时分多址接入(tdma)方案和无人机直线飞行(usf)方案等,利用所提出的算法显著提高了性能,此外,该算法能够提供更稳定的性能以适应操作环境的变化,并且无人机在高速飞行时,其优势将更加突出。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198876.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表