一种基于间歇性滑扑的跟随控制方法
- 国知局
- 2024-07-31 23:51:09
本发明涉及仿生鱼控制,具体而言,涉及一种基于间歇性滑扑的跟随控制方法。
背景技术:
1、仿蝠鲼水下航行器是一种在海洋中作滑翔运动并可以观测并采集海洋环境的新型观测平台,通过仿制蝠鲼的外形减小在水下滑翔的运动阻力,大大减少了能源消耗,利用胸鳍与尾鳍来进行驱动,可实现滑扑一体化,具有高机动和长续航的特点,可以实现广域粗维度、定点细维度的水下观测,并可以用于海洋环境监测和军事领域的探测。
2、当两个及以上的仿蝠鲼航行器在海洋中执行观测任务时,由于水下环境复杂,不同的地方有着不同强度以及不同速度的水流,这些都会干扰航行器按照所设定的距离进行跟随,即‘跟随者’不能按照所设定的距离来跟随‘领导者’,从而可能造成距离过远,两者失去联系;或是两者距离过近导致相撞造成严重的经济损失。传统的航行器实现跟随距离的实时把控通常依赖于传感器测距和适用的导航系统等方法,采用螺旋桨来推进,仿蝠鲼航行器结合滑翔机的滑翔推进和仿海洋生物蝠鲼的柔性推进,具有滑扑一体的特点,故传统的推进方式并不适用于仿蝠鲼航行器,而仿蝠鲼航行器至今没有比较准确的模型,为了解决水下航行器执行任务时所出现的跟随距离问题,需要设计一种针对滑扑一体化的航行器的跟随控制方法
技术实现思路
1、本发明解决的问题是如何解决仿蝠鲼水下航行器执行任务时所出现的跟随问题。
2、为解决上述问题,本发明提供一种基于间歇性滑扑跟随控制方法,包括两个仿生水下航行器,所述两个仿生水下航行器分别为领导者和跟随者,所述跟随者与领导者之间的间距划分为减速区、跟随区和追赶区,所述减速区的区间距离为[0,d0min],所述跟随区的区间距离为[d0min,d0max],所述追赶区的区间距离为[d0max,a],所述领导者和跟随者上分别设有超声波测距传感器、pid控制器、cpg控制器和速度传感器,所述基于间歇性滑扑跟随控制方法包括:
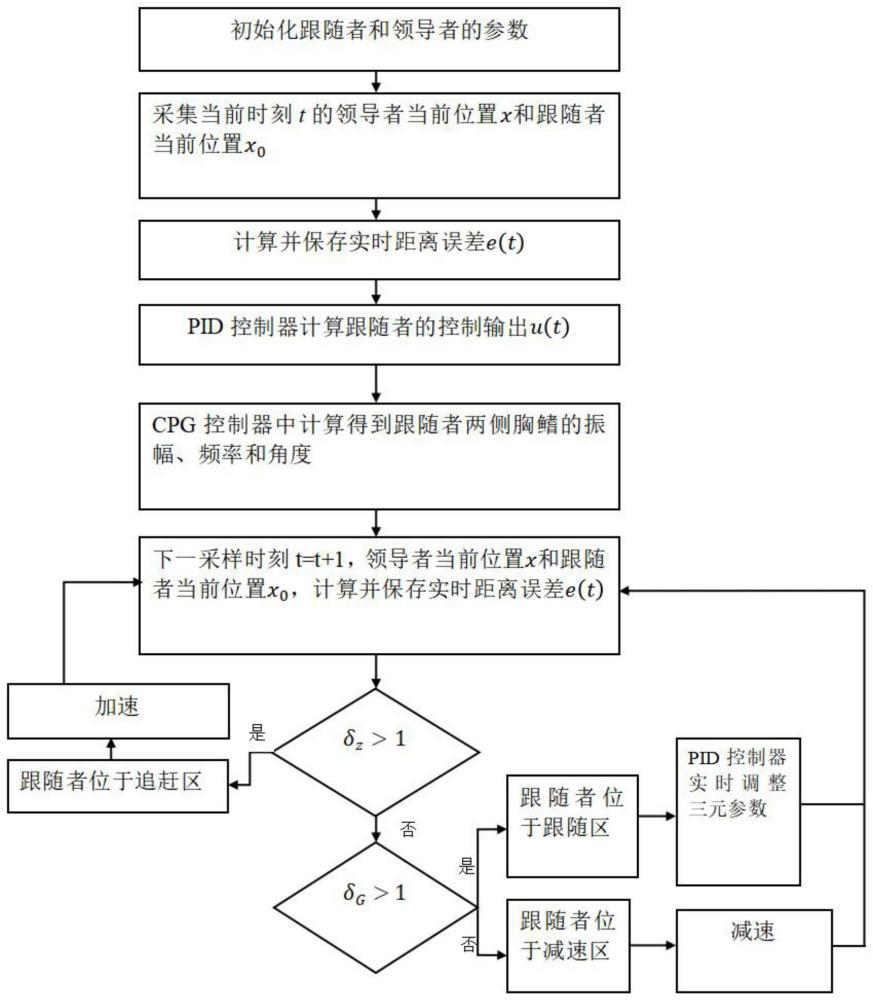
3、步骤1.初始化跟随者和领导者的参数,定义采样周期t、目标距离d以及控制领导者和跟随者运行的pid控制器三元参数比例常数kp、积分常数ki和微分常数kd;
4、步骤2.采集当前时刻t的领导者当前位置x和跟随者当前位置x0;
5、步骤3.计算实时距离误差e(t)=x-x0-d;
6、步骤4.将实时距离误差输入跟随者的pid控制器,pid控制器计算跟随者的控制输出u(t);
7、步骤5.将控制输出u(t)输入到cpg控制器中计算得到跟随者两侧胸鳍的振幅;
8、步骤6.更新跟随者的当前位置x0,进入下一采样周期,获取领导者的当前位置x,计算实时距离误差e0=x-x0-d;
9、步骤7.计算并判断δz是否大于1,若是,则跟随者处于追赶区,进去步骤9,若否,则进入步骤8;
10、步骤8.计算并判断δg是否大于1,若是,则跟随者正处于跟随区,进入步骤10,若否,则跟随者正处于减速区,进入步骤11;
11、步骤9.跟随者切换至扑动模态进行加速,跟随者两侧胸鳍的振幅为将振幅af输入到cpg控制器中,跟随者根据cpg控制器的输出进行加速,返回步骤6;
12、步骤10.根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd,返回步骤6;
13、步骤11.跟随者切换至滑翔模式进行减速,跟随者两侧胸鳍的振幅为将振幅ag输入到cpg控制器中,跟随者根据cpg控制器的输出进行减速,返回步骤6。
14、本发明的有益效果为:通过获取跟随者与领导者的实际距离,根据实际距离与设定距离的偏差,通过pid控制器调整cpg控制器的振幅,通过调整跟随者扑动模态与滑翔模态的切换,在跟随者与领导者距离太远超出跟随区时,通过增加跟随者两侧胸鳍的振幅使跟随者加速,直至跟随者进入跟随区;当跟随者与领导者距离太靠近,通过减少跟随者两侧胸鳍的振幅使跟随者减速,直至跟随者处于跟随区,跟随区则采用pid实现闭环控制。
15、作为优选,根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd具体包括:
16、
17、作为优选,所述cpg控制器的计算模型为:
18、
19、式中,为振幅方程,表示第i个神经单元的振幅,γi表示控制振幅收敛速度的常数,ai表示第i个神经单元的期望振幅,表示振幅的一阶导数;为相位方程,表示第i个神经单元的相位,ωij表示第j个神经单元对第i个神经单元的耦合权重0,表示第j个神经单元的相位,表示期望相位差;为输出方程,θi表示第i个神经单元的输出角度。
20、作为优选,所述步骤10中根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd以使跟随者始终保持在跟随区内具体包括:
21、所述步骤10中根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd以使跟随者始终保持在跟随区内具体包括:
22、s1.根据计算保存的历史实时距离误差e(t)计算相邻采样周期的历史偏差和偏差变化率ec(t);
23、s2.判断偏差变化率ec(t)是否大于零,若是,则进入s3;若否,则进入s4;
24、s3.判断ec(t)是否大于ec(t)-1),若是,则跟随者与领导者之间距离在不断拉大,pid控制器计算控制输出u(t),并将输出u(t)进行非线性映射为仿生水下航行器上胸鳍的扑动参数,使仿生水下航行器进行加速;若否,则进入s6;
25、s4.判断偏差变化率ec(t)是否小于零,若是,则进入s5,若否,则偏差变化率ec(t)=0,进入s6;
26、s5.判断ec(t)是否小于ec(t-1),若是,则跟随者与领导者之间距离在不断缩小,pid控制器计算控制输出u(t),并将输出u(t)进行非线性映射为仿生水下航行器上胸鳍的扑动参数,使仿生水下航行器进行减速;若否,则进入s6;
27、s6.跟随者以当前cpg控制器的输出继续运行。
28、作为优选,所述s3和s5中pid控制器计算控制输出u(t)表示为:
29、
30、式中,u(t)为当前时刻t控制器的控制输出;
31、所述s3和s5中将所述输出u(t)进行非线性映射转为仿生水下航行器上胸鳍的扑动参数的调整值表示为:
32、δai′=α.log(1+|u(t)|)
33、ai+1=δai′+ai
34、式中,α为非线性映射系数,扑动参数包括第i个神经单元的振幅δai'。
技术特征:1.一种基于间歇性滑扑跟随控制方法,包括两个仿生水下航行器,所述两个仿生水下航行器分别为领导者和跟随者,所述跟随者与领导者之间的间距划分为减速区、跟随区和追赶区,所述减速区的区间距离为[0,d0min],所述跟随区的区间距离为[d0min,d0max],所述追赶区的区间距离为[d0max,a],所述领导者和跟随者上分别设有超声波测距传感器、pid控制器、cpg控制器和速度传感器,所述基于间歇性滑扑跟随控制方法包括:
2.根据权利要求1所述的一种基于间歇性滑扑跟随控制方法,其特征在于,根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd具体包括:
3.根据权利要求1所述的一种基于间歇性滑扑跟随控制方法,其特征在于,所述cpg控制器的计算模型为:
4.根据权利要求1所述的一种基于间歇性滑扑跟随控制方法,其特征在于,所述步骤10中根据实时距离误差e(t)动态调整pid控制器的三元参数kp、ki和kd以使跟随者始终保持在跟随区内具体包括:
5.根据权利要求4所述的一种基于间歇性滑扑跟随控制方法,其特征在于,所述s3和s5中pid控制器计算控制输出u(t)表示为:
技术总结本发明涉及一种基于间歇性滑扑的跟随控制方法,通过获取跟随者与领导者的实际距离,根据实际距离与设定距离的偏差,通过PID控制器调整CPG控制器的振幅,通过调整跟随者扑动模态与滑翔模态的切换,在跟随者与领导者距离太远超出跟随区时,通过增加跟随者两侧胸鳍的振幅使跟随者加速,直至跟随者进入跟随区;当跟随者与领导者距离太靠近,通过减少跟随者两侧胸鳍的振幅使跟随者减速,直至跟随者处于跟随区。技术研发人员:曹勇,郝艺伟,张文泽,刘澳,金家乐,骆凯盟,曹永辉,潘光受保护的技术使用者:西北工业大学宁波研究院技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表