一种基于自适应扩展卡尔曼滤波器的高超声速飞行器姿态控制方法
- 国知局
- 2024-07-31 23:51:01
本发明属于系统控制,具体地,涉及一种基于自适应扩展卡尔曼滤波器的高超声速飞行器姿态控制方法。
背景技术:
1、高超声速飞行器模型本身具有强非线性、强耦合、强不确定性特点,而且实际飞行过程中,存在运行环境多变、气动参数变化剧烈、随机阵风干扰、传感器测量误差等一系列问题,使其在受扰动控制系统设计方面临着诸多挑战。因此在高超声速飞行器的实际系统控制当中,减弱或消除内部参数不确定和外部干扰,是非常有必要的。
2、在现有的研究中,针对受扰动高超声速飞行器的控制,提出了一系列的控制方法,例如,模型预测控制方法、基于干扰观测器的控制方法、滑模控制、智能控制方法等,均取得了一定的成果,但干扰的随机性在一定程度上限制了这些方法的使用。针对满足高斯分布的随机干扰,近年来提出了基于蒙特卡洛方法的随机问题处理方法、基于卡尔曼滤波各种控制方法,但在高超声速飞行器运行中仍存在的各种随机不确定性,其统计特性并不满足严格意义上的高斯分布。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种基于自适应扩展卡尔曼滤波器的高超声速飞行器姿态控制方法,能够使高超声速飞行器的姿态控制系统消除或削弱内部参数摄动、外部随机干扰和传感器测量误差,该姿态控制方法可以在上述复合干扰的情况下保持高超声速飞行器的姿态稳定,并能提高姿态的控制精度。
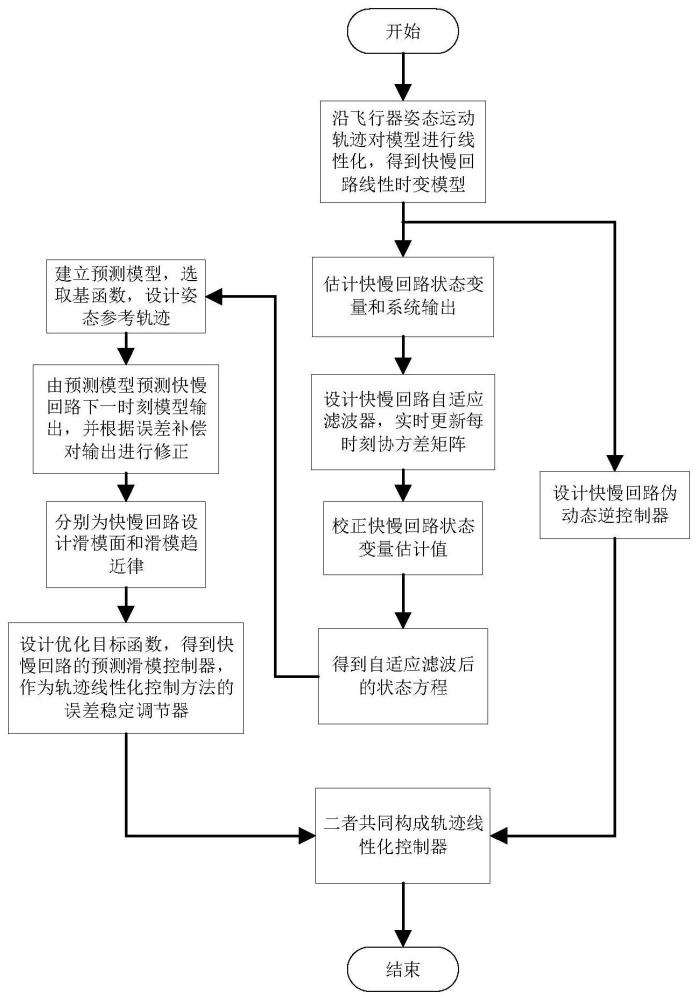
2、为实现上述技术目的,本发明采用如下技术方案:一种基于自适应扩展卡尔曼滤波器的高超声速飞行器姿态控制方法,具体包括如下步骤:
3、步骤1:根据高超声速飞行器姿态控制系统建立高超声速飞行器的非线性姿态快、慢回路模型,利用轨迹线性化方法沿高超声速飞行器的运动轨迹对非线性姿态快、慢回路模型进行线性化,得到高超声速飞行器姿态快、慢回路线性时变模型;
4、步骤2:根据步骤1得到的高超声速飞行器姿态快、慢回路线性时变模型实时更新每个时刻高超声速飞行器姿态控制系统中过程噪声协方差矩阵和观测噪声协方差矩阵的估计值,设计出快、慢回路自适应扩展卡尔曼滤波器,校正高超声速飞行器姿态控制系统中快、慢回路状态变量估计值;
5、步骤3:根据校正后的高超声速飞行器姿态控制系统中快、慢回路状态变量估计值设计基于自适应扩展卡尔曼滤波器的快、慢回路跟踪误差稳定调节器;
6、步骤4:根据高超声速飞行器的非线性姿态快、慢回路模型设计快、慢回路轨迹线性化控制器的伪逆控制器,结合步骤3得到的快、慢回路跟踪误差稳定调节器,构建快、慢回路控制器,实现对高超声速飞行器姿态控制系统中的姿态控制。
7、进一步地,步骤1中高超声速飞行器姿态慢回路线性时变模型通过以下子步骤得到:
8、步骤1.1.1、根据高超声速飞行器姿态控制系统中慢回路非线性状态方程fs(ω,p)、慢回路非线性输入方程gs(ω,p)、姿态角速率ω=[p,q,r]t和非线性姿态慢回路模型中的外部干扰ηs、vs,建立高超声速飞行器的非线性姿态慢回路模型其中,ω表示高超声速飞行器的姿态角,ω=[α,β,μ]t,α、β、μ分别表示高超声速飞行器的迎角、侧滑角、滚转角,p表示高超声速飞行器的非线性姿态慢回路模型参数,p、q、r分别表示高超声速飞行器的迎角角速度、侧滑角角速度、滚转角角速度,ys表示高超声速飞行器姿态慢回路系统的输出;
9、步骤1.1.2、分别设置ω对应的标称状态ω对应的标称输入p对应的标称参数利用轨迹线性化方法,获取高超声速飞行器的非线性姿态慢回路模型的状态误差eω、输出跟踪误差yes、误差跟踪控制的输入ωe、模型参数误差pe:
10、
11、步骤1.1.3、结合线性化后与eω相关的第一时变矩阵as、第二时变矩阵cs,分别与ωe、pe相关的时变矩阵bs、φs,得到高超声速飞行器姿态慢回路线性时变模型:
12、
13、进一步地,步骤1中高超声速飞行器姿态快回路线性时变模型通过以下子步骤得到:
14、步骤1.2.1、根据高超声速飞行器姿态控制系统中快回路非线性状态方程ff(ω,p)、快回路非线性输入方程gf(ω,p)、控制力矩向量mc、非线性姿态快回路模型中的外部干扰ηf、vf和姿态角速率ω=[p,q,r]t,建立高超声速飞行器的非线性姿态快回路模型其中,p、q、r分别表示高超声速飞行器的迎角角速度、侧滑角角速度、滚转角角速度,yf表示高超声速飞行器姿态快回路系统的输出;
15、步骤1.2.2、分别设置ω对应的标称状态mc对应的标称输入获取高超声速飞行器的非线性姿态快回路模型的状态误差eω、输出跟踪误差yef和误差控制的输入mce:
16、
17、步骤1.2.3、结合线性化后与eω相关的第一时变矩阵af、第二时变矩阵cf,分别与mce相关的时变矩阵bf、与模型参数误差pe相关的时变矩阵φf,得到高超声速飞行器姿态快回路线性时变模型:
18、
19、进一步地,步骤2中慢回路自适应扩展卡尔曼滤波器的设计过程为:
20、
21、
22、
23、
24、ps(k)=(i-hs(k))p′s(k)
25、
26、
27、其中,表示慢回路状态误差校正前估计值,ues(k)表示慢回路误差稳定调节器,p′s(k)表示慢回路校正前状态估计误差协方差矩阵,表示高超声速飞行器姿态慢回路控制系统中噪声协方差矩阵的估计值,hs(k)表示高超声速飞行器姿态慢回路控制系统中卡尔曼增益,表示高超声速飞行器姿态慢回路控制系统中观测噪声协方差矩阵的估计值,表示高超声速飞行器姿态慢回路控制系统误差补偿后k时刻eω的估计值,ps(k)表示高超声速飞行器姿态慢回路控制系统k时刻未校正状态估计误差均方值,ξs(k)表示高超声速飞行器姿态慢回路控制系统输出跟踪误差yes与预测跟踪误差之间的差值。
28、进一步地,步骤2中快回路自适应扩展卡尔曼滤波器的设计过程为:
29、
30、
31、
32、
33、pf(k)=(i-hf(k))p′f(k)
34、
35、
36、其中,表示快回路状态误差校正前估计值,uef(k)表示快回路误差稳定调节器,pf′(k)表示快回路校正前状态估计误差协方差矩阵,表示高超声速飞行器姿态快回路控制系统中噪声协方差矩阵的估计值,hf(k)表示高超声速飞行器姿态快回路控制系统中卡尔曼增益,表示高超声速飞行器姿态快回路控制系统中观测噪声协方差矩阵的估计值,表示高超声速飞行器姿态快回路控制系统误差补偿后k时刻eω的估计值,pf(k)表示高超声速飞行器姿态快回路控制系统k时刻未校正状态估计误差均方值,ξf(k)表示高超声速飞行器姿态快回路控制系统输出跟踪误差yef与预测跟踪误差之间的差值。
37、进一步地,步骤3中慢回路跟踪误差稳定调节器ωce(k)的获取过程为:
38、
39、其中,ces表示慢回路的适维矩阵,g1s、k1s表示关于as、bs、φs、cs的线性时变函数,qms、εs均表示大于零的常数,pm表示预测步长,ts表示采样时间,ss(k)表示慢回路滑模面,sgn()表示阶跃函数,表示校正后的高超声速飞行器姿态控制系统中慢回路状态变量估计值。
40、进一步地,步骤3中快回路跟踪误差稳定调节器mce(k)的获取过程为:
41、
42、其中,cef表示快回路的适维矩阵,g1f、k1f均表示关于af、bf、φf、cf的线性时变函数,qmf、εf均表示常数,pm表示预测步长,ts表示采样时间,sf(k)表示快回路滑模面,sgn()表示阶跃函数,表示校正后的高超声速飞行器姿态控制系统中快回路状态变量估计值。
43、进一步地,步骤4中慢回路轨迹线性化控制器的伪逆控制器的设计过程为:
44、
45、步骤4中慢回路控制器ωc的构建过程为:
46、
47、进一步地,步骤4中快回路轨迹线性化控制器的伪逆控制器的设计过程为:
48、
49、步骤4中慢回路控制器mc的构建过程为:
50、
51、与现有技术相比,本发明具有如下有益效果:本发明从高超声速飞行器的非线性姿态快、慢回路模型的不确定性和非高斯分布随机干扰入手,在基于轨迹线性化的预测滑模控制的基础之上,研究高超声速飞行器的姿态系统在非高斯随机干扰下的控制问题,将外部随机干扰等效为过程噪声,将传感器的测量误差等效为观测噪声,提出一种基于自适应扩展卡尔曼滤波器的高超声速飞行器姿态控制方法,以解决预测滑模控制方法在飞行区域变化、模型参数变化、非高斯随机干扰时,控制效果不佳的问题。本发明能够使高超声速飞行器姿态控制系统在多种不确定和干扰下稳定,尤其在非高斯随机干扰的作用下仍然能够精确地跟踪参考轨迹,系统具有较强的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198823.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表