异常姿态检测系统和割草机器人的制作方法
- 国知局
- 2024-07-31 23:50:57
本技术涉及电力电子,具体而言,涉及一种异常姿态检测系统和割草机器人。
背景技术:
1、在机器人技术飞速发展的今天,割草机器人的应用市场日趋扩大。割草机器人的刀盘在运行中处于高速旋转的状态,若是机器人发生抬起、倾倒或侧翻等情况,刀盘存在伤人风险。
技术实现思路
1、为了解决上述技术问题,本申请实施例提供了一种异常姿态检测系统和割草机器人。
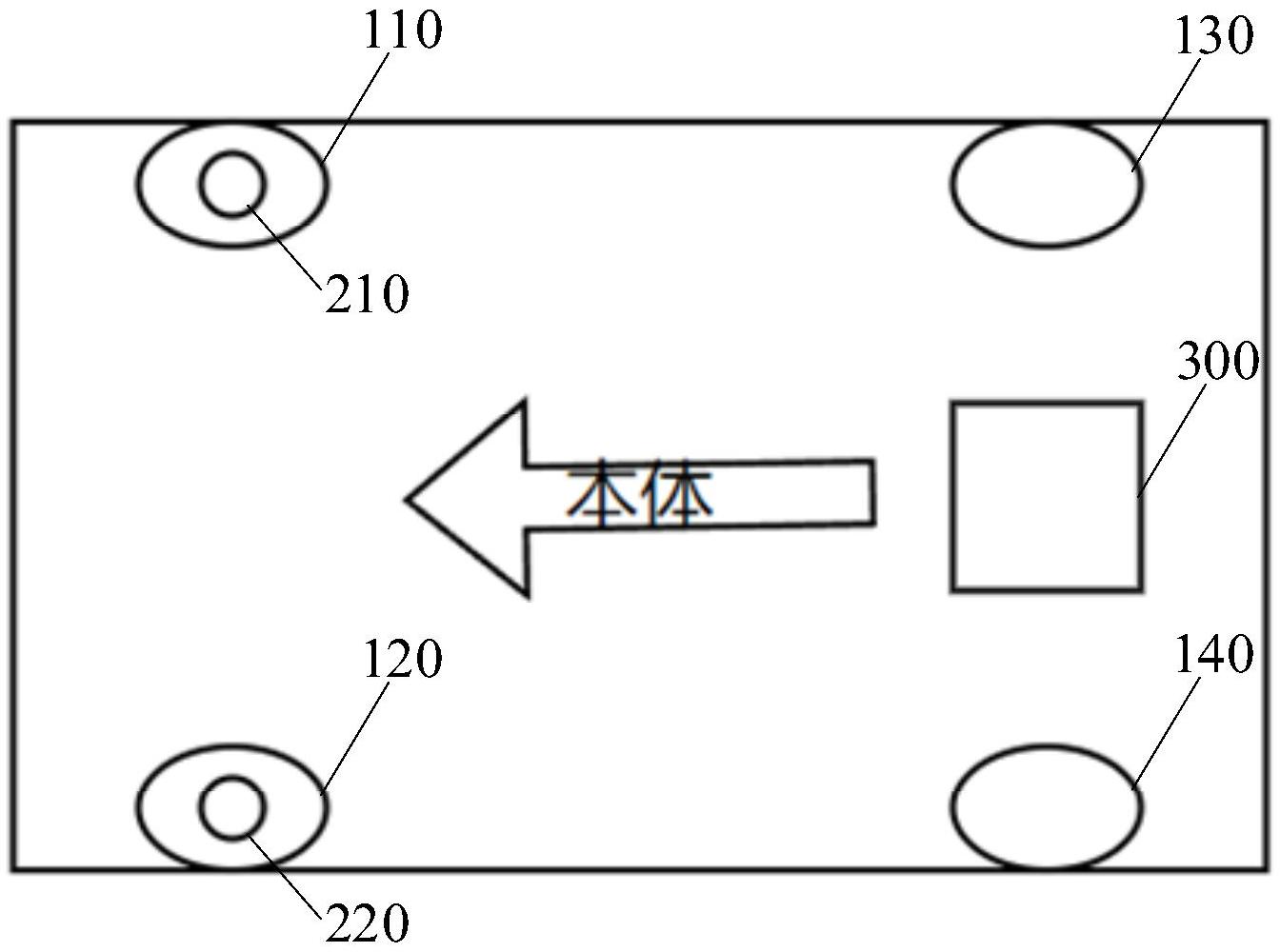
2、第一方面,本申请实施例提供了一种异常姿态检测系统,应用于割草机器人,所述割草机器人包括第一前轮结构、第二前轮结构、第一后轮结构和第二后轮结构,其中,所述第一前轮结构和所述第二前轮结构上下可伸缩,所述第一后轮结构和所述第二后轮结构不可伸缩;
3、所述系统包括第一霍尔检测模块、第二霍尔检测模块和加速度检测模块;所述第一霍尔检测模块设置在对应所述第一前轮结构的第一检测位,所述第二霍尔检测模块设置在对应所述第二前轮结构的第二检测位,所述加速度检测模块设置在所述第一后轮结构和所述第二后轮结构之间;
4、当所述第一前轮结构的伸缩量达到所述第一霍尔检测模块的触发值时,所述第一霍尔检测模块被触发;当所述第二前轮结构的伸缩量达到所述第二霍尔检测模块的触发值时,所述第二霍尔检测模块被触发;当所述第一霍尔检测模块和所述第二霍尔检测模块均被触发时,则判定所述割草机器人处于异常姿态;
5、当所述加速度检测模块检测到所述割草机器人的倾角大于最大倾角时,则判定所述割草机器人处于所述异常姿态。
6、在一实施方式中,所述第一霍尔检测模块包括第一霍尔传感器、第一隔离电容和第一瞬态抑制单元;
7、所述第一霍尔传感器的第一引脚与所述第一隔离电容的第一端电连接,所述第一霍尔传感器的第二引脚用于当所述第一霍尔检测模块被触发时输出第一触发信号,所述第一霍尔传感器的第三引脚接地;
8、所述第一隔离电容的第一端与低压电源电连接,所述第一隔离电容的第二端接地;
9、所述第一瞬态抑制单元的第一端与所述第一霍尔传感器的第二引脚电连接,所述第一瞬态抑制单元的第二端接地。
10、在一实施方式中,所述第一霍尔检测模块还包括第三隔离电容;
11、所述第三隔离电容的第一端与所述第一霍尔传感器的第二引脚电连接,所述第三隔离电容的第二端接地。
12、在一实施方式中,所述第一霍尔检测模块还包括第一电阻;
13、所述第一电阻的第一端与所述第一霍尔传感器的第二引脚电连接,所述第一电阻的第二端与所述第三隔离电容的第一端电连接。
14、在一实施方式中,所述第二霍尔检测模块包括第二霍尔传感器、第二隔离电容和第二瞬态抑制单元;
15、所述第二霍尔传感器的第一引脚与所述第二隔离电容的第一端电连接,所述第二霍尔传感器的第二引脚用于当所述第二霍尔检测模块被触发时输出第二触发信号,所述第二霍尔传感器的第三引脚接地;
16、所述第二隔离电容的第一端与低压电源电连接,所述第二隔离电容的第二端接地;
17、所述第二瞬态抑制单元的第一端与所述第二霍尔传感器的第二引脚电连接,所述第二瞬态抑制单元的第二端接地。
18、在一实施方式中,所述第二霍尔检测模块还包括第四隔离电容;
19、所述第四隔离电容的第一端与所述第二霍尔传感器的第二引脚电连接,所述第四隔离电容的第二端接地。
20、在一实施方式中,所述第二霍尔检测模块还包括第二电阻;
21、所述第二电阻的第一端与所述第二霍尔传感器的第二引脚电连接,所述第二电阻的第二端与所述第四隔离电容的第一端电连接。
22、在一实施方式中,所述加速度检测模块包括三轴加速度计、第三电阻、第四电阻和第五电阻;
23、所述三轴加速度计的第一引脚接地,所述三轴加速度计的第二引脚与所述第五电阻的第一端电连接,所述三轴加速度计的第三引脚与低压电源电连接,所述三轴加速度计的第五引脚与所述第三电阻的第一端电连接,所述三轴加速度计的第十二引脚与所述第四电阻的第一端电连接;
24、所述第三电阻的第二端用于接入中断信号,所述第四电阻的第二端用于接入时钟信号,所述第五电阻的第二端用于接入数据信号。
25、在一实施方式中,所述加速度检测模块还包括第六电阻、第七电阻和第八电阻;
26、所述第六电阻的第一端与所述低压电源电连接,所述第六电阻的第二端与所述第三电阻的第二端电连接;
27、所述第七电阻的第一端与所述低压电源电连接,所述第七电阻的第二端与所述第四电阻的第二端电连接;
28、所述第八电阻的第一端与所述低压电源电连接,所述第八电阻的第二端与所述第五电阻的第二端电连接。
29、第二方面,本申请实施例提供了一种割草机器人,所述割草机器人包括如第一方面所述的异常姿态检测系统和控制器,所述控制器用于当所述割草机器人处于异常姿态时,控制所述割草机器人的刀盘停止运行。
30、上述本申请提供的异常姿态检测系统和割草机器人,融合了加速度检测和霍尔检测两种检测方式,其能够弥补加速度变化小或者霍尔未触发时,导致测量不准的缺陷,且能够检测多种情况导致的异常姿态,使设备抬起或倾倒检测更加可靠。
技术特征:1.一种异常姿态检测系统,其特征在于,应用于割草机器人,所述割草机器人包括第一前轮结构、第二前轮结构、第一后轮结构和第二后轮结构,其中,所述第一前轮结构和所述第二前轮结构上下可伸缩,所述第一后轮结构和所述第二后轮结构不可伸缩;
2.根据权利要求1所述的异常姿态检测系统,其特征在于,所述第一霍尔检测模块包括第一霍尔传感器、第一隔离电容和第一瞬态抑制单元;
3.根据权利要求2所述的异常姿态检测系统,其特征在于,所述第一霍尔检测模块还包括第三隔离电容;
4.根据权利要求3所述的异常姿态检测系统,其特征在于,所述第一霍尔检测模块还包括第一电阻;
5.根据权利要求1所述的异常姿态检测系统,其特征在于,所述第二霍尔检测模块包括第二霍尔传感器、第二隔离电容和第二瞬态抑制单元;
6.根据权利要求5所述的异常姿态检测系统,其特征在于,所述第二霍尔检测模块还包括第四隔离电容;
7.根据权利要求6所述的异常姿态检测系统,其特征在于,所述第二霍尔检测模块还包括第二电阻;
8.根据权利要求1所述的异常姿态检测系统,其特征在于,所述加速度检测模块包括三轴加速度计、第三电阻、第四电阻和第五电阻;
9.根据权利要求8所述的异常姿态检测系统,其特征在于,所述加速度检测模块还包括第六电阻、第七电阻和第八电阻;
10.一种割草机器人,其特征在于,所述割草机器人包括如权利要求1-9任一项所述的异常姿态检测系统和控制器,所述控制器用于当所述割草机器人处于异常姿态时,控制所述割草机器人的刀盘停止运行。
技术总结本技术的实施例提供了一种异常姿态检测系统和割草机器人,涉及电力电子技术领域。该系统包括:第一霍尔检测模块、第二霍尔检测模块和加速度检测模块;当第一前轮结构的伸缩量达到第一霍尔检测模块的触发值时,第一霍尔检测模块被触发;当第二前轮结构的伸缩量达到第二霍尔检测模块的触发值时,第二霍尔检测模块被触发;当第一霍尔检测模块和第二霍尔检测模块均被触发时,则判定割草机器人处于异常姿态;当加速度检测模块检测到割草机器人的倾角大于最大倾角时,则判定割草机器人处于异常姿态。本申请能够检测多种情况导致的异常姿态,使设备抬起或倾倒检测更加可靠。技术研发人员:杨波,何雨林受保护的技术使用者:深圳市优必选科技股份有限公司技术研发日:20231201技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198814.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表