自适应测试评估的方法、装置、计算机存储介质及终端
- 国知局
- 2024-07-31 23:51:01
本申请涉及但不限于自动驾驶技术,其中涉及一种自适应测试评估的方法、装置、计算机存储介质及终端。
背景技术:
1、当前自动驾驶汽车面临严峻的安全问题,一些前沿的汽车车辆运营公司研发的自动驾驶汽车均遭遇了严重的交通事故,这些安全问题阻碍了自动驾驶汽车的规模化应用和商业化落地,因此,需对自动驾驶汽车进行测试评估。自动驾驶汽车的测试评估的基本流程包括:根据生成的一系列测试场景,对自动驾驶汽车进行测试;收集测试结果并对自动驾驶汽车的安全性进行评估;相关技术中的测试评估,通常可以得到事故率等测试指标的估计值。
2、真实道路测试评估方法是相关技术中的测试评估方法,因为自然驾驶环境中的安全关键场景(如碰撞事故场景等)非常罕见,事故事件发生概率极低,存在真实道路测试的低效性问题,导致基于蒙特卡洛采样的测试方法需要非常多的测试次数才可以得到事故率的估计值,据测算一款自动驾驶汽车需要在自然驾驶环境中累积测试超过100亿公里,才能得到较高置信度的安全性能测试结果;而大量测试所消耗的时间成本和经济成本是不可接受的。重要性采样方法可以缓解自动驾驶汽车的事故事件发生概率极低的问题,其基本思想是提高那些容易发生事故的关键场景的采样概率,从而提高测试效率。但是,重要性采样方法面临维度灾难问题,无法应用于高维测试环境中。
3、由于自动驾驶汽车系统的高度复杂性和所采用神经网络算法的黑箱性,利用单一代理模型(例如idm、fvdm等模型)构造的重要性采样函数q与多种类型的被测自动驾驶汽车对应的最优重要性采样函数之间存在很大差距,导致基于重要性采样方法的测试效率存在提升瓶颈,而自适应测试评估方法则致力于解决这个问题。相关技术中的自适应测试评估方法主要包括如下三个阶段:第一阶段:在正式进行测评之前,通过对自动驾驶汽车进行少量测试得到测试结果,并利用这些测试结果优化重要性采样函数;第二阶段:使用优化后的重要性采样函数对自动驾驶汽车进行测试,得到测试结果;第三阶段:根据稀疏对抗采样方法得到测试指标的估计结果,直到测试指标满足预先设定的收敛条件。自适应测试策略调整方法是自适应测试评估方法的一种调整方法,自适应测试策略调整方法主要应用于自适应测试评估方法第一阶段。
4、上述自适应测试评估方法只能用于简单低维的测试场景中,如何获得高效的可应用于高维测试环境的测试评估方法,成为一个有待解决的问题。
技术实现思路
1、以下是对本申请详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本公开实施例提供一种自适应测试评估的方法、装置、计算机存储介质及终端,能够在高维测试环境中高效实现自动驾驶车辆的测试评估。
3、本公开实施例提供了一种自适应测试评估的方法,包括:
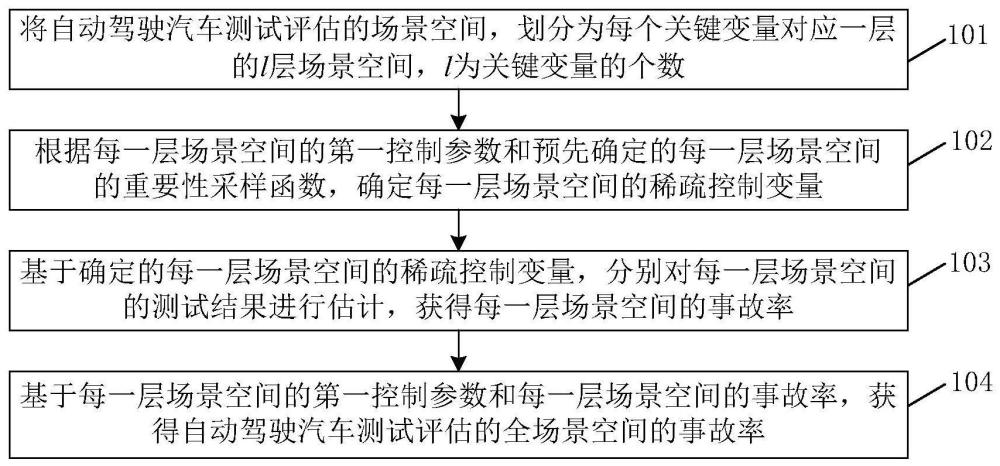
4、将自动驾驶汽车测试评估的场景空间,划分为每个关键变量对应一层的l层场景空间,l为关键变量的个数;
5、根据每一层场景空间的第一控制参数和预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量;
6、基于确定的每一层场景空间的稀疏控制变量,分别对每一层场景空间的测试结果进行估计,获得每一层场景空间的事故率;
7、基于每一层场景空间的第一控制参数和每一层场景空间的事故率,获得自动驾驶汽车测试评估的全场景空间的事故率。
8、另一方面,本公开实施例还提供一种计算机存储介质,所述计算机存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现上述自适应测试评估的方法。
9、再一方面,本公开实施例还提供一种终端,包括:存储器和处理器,所述存储器中保存有计算机程序;其中,
10、处理器被配置为执行存储器中的计算机程序;
11、所述计算机程序被所述处理器执行时实现如上述自适应测试评估的方法。
12、还一方面,本公开实施例还提供一种自适应测试评估的装置,包括:划分单元、确定稀疏控制变量单元、估计单元和确定结果单元;其中,
13、划分单元设置为:将自动驾驶汽车测试评估的场景空间,划分为每个关键变量对应一层的l层场景空间,l为关键变量的个数;
14、确定稀疏控制变量单元设置为:根据每一层场景空间的第一控制参数和预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量;
15、估计单元设置为:基于确定的每一层场景空间的稀疏控制变量,分别对每一层场景空间的测试结果进行估计,获得每一层场景空间的事故率;
16、确定结果单元设置为:基于每一层场景空间的第一控制参数和每一层场景空间的事故率,获得自动驾驶汽车测试评估的全场景空间的事故率。
17、与相关技术相比,本公开实施例根据测试场景中包含的关键变量的个数将场景空间按层划分,基于每一层场景空间的第一控制参数和预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量;基于确定的每一层场景空间的稀疏控制变量,对每一层场景空间的测试结果进行估计,获得每一层场景空间的事故率;基于每一层场景空间的第一控制参数和每一层场景空间的事故率,获得自动驾驶汽车测试评估的全场景空间的事故率;可适用于高维测试环境,实现了自动驾驶汽车的高效测试评估。
18、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
技术特征:1.一种自适应测试评估的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据每一层场景空间的第一控制参数预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量之前,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述每一层场景空间的稀疏控制变量的表达式为:
4.根据权利要求3所述的方法,其特征在于,所述每一层场景空间的事故率为的表达式为:
5.根据权利要求1至4任一项所述的方法,其特征在于,所述根据每一层场景空间的第一控制参数和预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量之前,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述二次规划模型,由所述调整模型基于最优的重要性采样函数的组成结构确定。
7.根据权利要求6所述的方法,其特征在于,所述二次规划模型的表达式为:
8.根据权利要求7所述的方法,其特征在于,所述自适应搜索策略的表达式为:
9.根据权利要求8所述的方法,其特征在于,所述根据采样时刻的状态,从离散动作空间中根据构建的自适应搜索策略采样出对应于该采样时刻的状态的动作,以获得状态动作对,包括:
10.根据权利要求5所述的方法,其特征在于,所述将获得的状态动作对代入转换得到的二次规划模型进行求解,包括:
11.根据权利要求10所述的方法,其特征在于,所述将搜索到的状态动作对代入转换获得的二次规划模型时,所述二次规划模型的表达式为:
12.根据权利要求5所述的方法,其特征在于,所述预设的求解停止条件,包括:预先设定的平均滑动差分函数的取值小于预先设定的停止阈值;
13.一种计算机存储介质,所述计算机存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至12中任一项所述的自适应测试评估的方法。
14.一种终端,包括:存储器和处理器,所述存储器中保存有计算机程序;其中,
15.一种自适应测试评估的装置,其特征在于,包括:划分单元、确定稀疏控制变量单元、估计单元和确定结果单元;其中,
技术总结本申请公开一种自适应测试评估的方法、装置、计算机存储介质及终端,本公开实施例根据测试场景中包含的关键变量的个数将场景空间按层划分,基于每一层场景空间的第一控制参数和预先确定的每一层场景空间的重要性采样函数,确定每一层场景空间的稀疏控制变量;基于确定的每一层场景空间的稀疏控制变量,对每一层场景空间的测试结果进行估计,获得每一层场景空间的事故率;基于每一层场景空间的第一控制参数和每一层场景空间的事故率,获得自动驾驶汽车测试评估的全场景空间的事故率;可适用于高维测试环境,实现了自动驾驶汽车的高效测试评估。技术研发人员:封硕,杨敬轩,张毅,白若瑄,何泓霖,李述,彭黎辉,胡坚明受保护的技术使用者:清华大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198821.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表