用于城市空中机动车辆的无人机器人及城市空中机动车辆的制作方法
- 国知局
- 2024-07-31 23:51:07
本公开涉及一种用于城市空中机动车辆的无人操作机器人(an unmanned robotfor an urban air mobility vehicle)及使用该无人机器人的城市空中机动车辆。
背景技术:
1、城市空中机动车辆的平稳运行需要在城市空中机动车辆起飞前或城市空中机动车辆着陆后进行各种地面作业。在城市空中机动车辆针对此类地面作业移动的过程中,城市空中机动车辆可能与另一城市空中机动车辆或其他对象发生碰撞而造成机身损坏,或者可能与工作人员发生碰撞而造成事故。
2、此外,在城市空中机动车辆的起降区与登机口之间没有单独的路线指示可能导致乘客对移动路径感到困惑。
3、本公开的背景中包括的信息仅用于增强对本公开的一般背景的理解,且不可以被视为承认或以任何形式暗示该信息形成已为本领域技术人员所知的现有技术。
技术实现思路
1、本公开的各个方面旨在提供一种用于城市空中机动车辆的无人机器人及使用该无人机器人的城市空中机动车辆,该无人机器人能够提前防止与其他对象碰撞造成的事故并引导乘客安全进出。
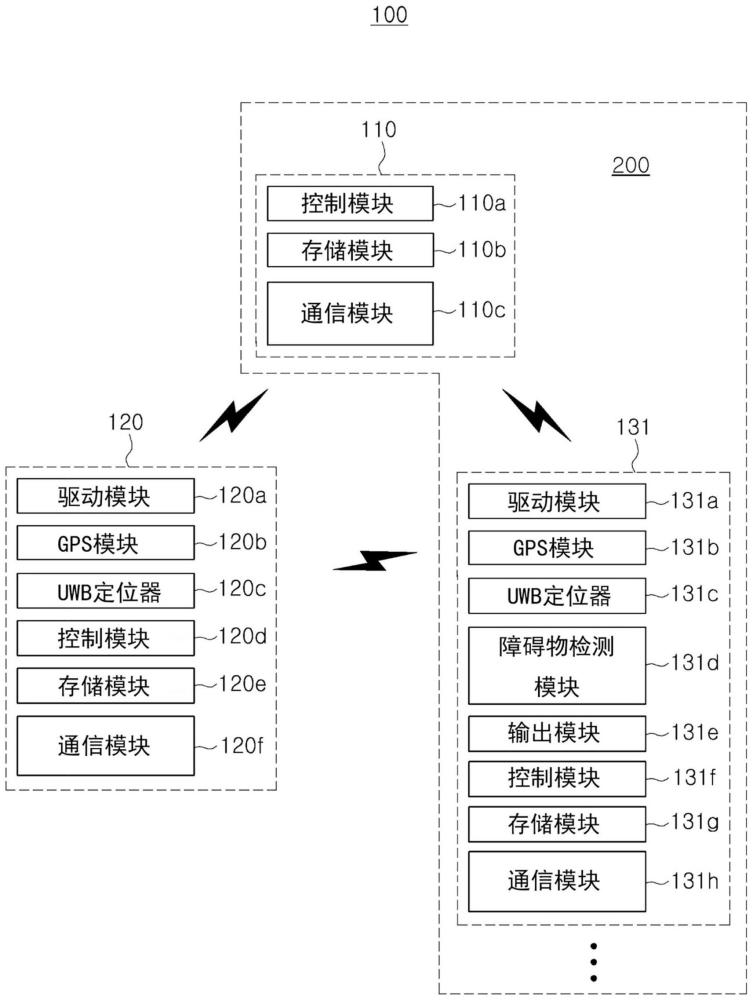
2、根据本公开的一方面,一种用于城市空中机动车辆的无人机器人可以包括:处理器;通信模块,可操作地连接到处理器并被配置为接收根据第一模式和第二模式中的一个的命令;以及至少一种存储介质,可操作地连接到处理器,其中被配置为由处理器可执行的程序记录在至少一种存储介质中,其中该程序可以包括针对控制模块的命令,该控制模块被配置为基于接收到的根据第一模式和第二模式中的一个的命令来控制操作的执行,其中第一模式可以是一个或多个无人机器人在布置成围绕城市空中机动车辆的同时与城市空中机动车辆同步移动的模式,并且第二模式可以是一个或多个无人机器人布置在城市空中机动车辆的起降区与登机口之间的路面上从而为乘客提供进出的移动路径的模式。
3、根据本公开的另一方面,城市空中机动车辆可以包括:处理器;通信模块,被配置为发送根据第一模式和第二模式中的一个的命令;以及至少一种存储介质,可操作地连接到处理器,其中被配置为由处理器可执行的程序记录在至少一种存储介质中,其中该程序可以包括针对控制模块的命令,该控制模块被配置为控制通信模块向无人机器人发送根据第一模式和第二模式中的一个的命令,其中第一模式可以是一个或多个无人机器人在布置成围绕城市空中机动车辆的同时与城市空中机动车辆同步移动的模式,并且第二模式可以是一个或多个无人机器人布置在城市空中机动车辆的起降区与登机口之间的路面上从而为乘客提供进出的移动路径的模式。
4、根据本公开的另一方面,提供一种用于在计算机上执行上述方法的计算机可读存储介质。
5、根据本公开的一方面,多个无人机器人可以在根据来自控制服务器的命令被布置成围绕城市空中机动车辆的外围的同时与城市空中机动车辆同步移动,并且可以提前警告与其他对象碰撞的风险,从而提前防止与其他对象碰撞造成的事故。
6、此外,根据本公开的一方面,多个无人机器人可以根据来自控制服务器的命令布置在城市空中机动车辆和登机口之间的路面上,并且可以为乘客提供进出城市空中机动车辆的移动路径,从而引导乘客安全进出。
7、本公开的方法和设备具有其他特征和优点,在本文中包含的附图和下列一起用于解释本公开的特定原理的具体实施方式中,其他特征和优点将变得显而易见且被更详细地阐述。
技术特征:1.一种无人机器人,所述无人机器人用于城市空中机动车辆,包括:
2.根据权利要求1所述的无人机器人,进一步包括超宽带锚点即uwb锚点,其中根据所述第一模式的命令包括关于所述城市空中机动车辆的位置的信息、关于所述城市空中机动车辆的形状和大小的信息、所述城市空中机动车辆中包括的uwb定位器的id以及设置有与所述uwb定位器相对应的uwb锚点的所述无人机器人的id。
3.根据权利要求2所述的无人机器人,进一步包括驱动模块,其中所述控制模块:
4.根据权利要求3所述的无人机器人,
5.根据权利要求3所述的无人机器人,
6.根据权利要求5所述的无人机器人,其中所述控制模块控制所述驱动模块根据关于在移动过程中到具有对应定位器id的对应uwb定位器的距离和方向的信息,通过增大或减小方向和速度来减小与uwb定位器的距离误差。
7.根据权利要求2所述的无人机器人,进一步包括:
8.根据权利要求7所述的无人机器人,其中所述警报信号以听觉或视觉的方式输出。
9.根据权利要求1所述的无人机器人,
10.根据权利要求9所述的无人机器人,进一步包括驱动模块,
11.根据权利要求10所述的无人机器人,其中,当接收到根据所述第二模式的命令时,所述控制模块控制所述驱动模块基于关于所述边界线上的位置的信息将所述无人机器人从所述第二等待点移动到所述边界线上的预定位置以形成所述移动路径。
12.根据权利要求11所述的无人机器人,进一步包括输出模块,所述输出模块以听觉或视觉的方式输出引导信息,
13.一种城市空中机动车辆,包括:
14.根据权利要求13所述的城市空中机动车辆,进一步包括超宽带定位器即uwb定位器,
15.根据权利要求14所述的城市空中机动车辆,其中所述uwb定位器的安装位置包括所述城市空中机动车辆的左翼和右翼的端部、尾翼的端部、驾驶舱前部的端部中的至少一个。
16.根据权利要求14所述的城市空中机动车辆,其中基于根据所述第一模式的命令,在所述无人机器人基于关于所述城市空中机动车辆的位置的信息而移动到与所述城市空中机动车辆间隔预设距离的第一等待点之后,
17.根据权利要求16所述的城市空中机动车辆,
18.根据权利要求13所述的城市空中机动车辆,进一步包括驱动模块,
19.根据权利要求13所述的城市空中机动车辆,
20.根据权利要求19所述的城市空中机动车辆,其中根据所述第二模式,所述无人机器人基于关于所述边界线上的位置的信息从第二等待点移动到所述边界线上的预定位置以形成所述移动路径。
技术总结一种用于城市空中机动车辆的无人机器人包括:处理器;通信模块;以及至少一种存储介质,可操作地连接到处理器,其中被配置为由处理器可执行的程序记录在至少一种存储介质中,其中该程序可以包括针对控制模块的命令,该控制模块被配置为基于接收到的根据第一模式和第二模式中的一个的命令来控制操作的执行,其中第一模式可以是一个或多个无人机器人与城市空中机动车辆同步移动的模式,并且第二模式可以是一个或多个无人机器人被布置在城市空中机动车辆的起降区与登机口之间的路面上来提供移动路径的模式。技术研发人员:金桂润,李知娥受保护的技术使用者:现代自动车株式会社技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198834.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表