用于辅助驾驶飞行器的方法与流程
- 国知局
- 2024-07-31 23:51:08
本发明涉及辅助驾驶飞行器的领域,并且更具体地涉及检测飞行器环境中的障碍物。
背景技术:
1、如已知的,驾驶飞行器一般需要先进的技能来掌握驾驶技术,并且特别是驾驶飞行器的技术。
2、实际上,飞行器中存在的大量命令使得使用每个飞行器变得复杂。这种命令多样性要求在给定飞行器中专门化。在单个飞行器的驾驶中的专业化在使用飞行器方面需要许多资格步骤,经由许可的通过和飞行小时数的计数。
3、然而,对于未来的空中活动,新兴的趋势是在更广阔的人口范围内可及的一组飞行交通工具。换言之,未来的一些飞行器将需要能够更容易地驾驶,以便具有比到目前为止所需的那些更少资格的更多数量的人可接近。
4、evtol(电气垂直起飞和着陆设备)的开始证实了这种趋势,evtol对应于对现在称为uam(城市空中交通)的响应,即城市空中交通趋于邀请更多的人控制电动飞行机器。飞行员,或优选地称为驾驶员,可以是希望在城市地区旅行的任何人的城市空中出租车,这将仅受为飞行提供能量的电池的电存储容量限制(目前主要的技术约束)。
5、在此背景下,为了能够使城市飞行更容易接近,有必要为飞行员提供更好的人体工程学和更好的辅助。
技术实现思路
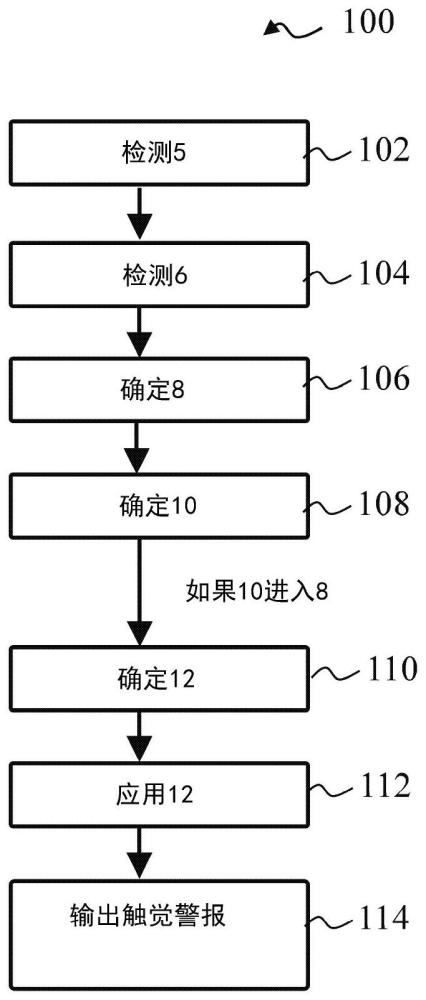
1、为此,根据第一方面,提出了一种用于辅助飞行器驾驶的方法,该方法由包括电子电路系统的计算系统来实现。该方法包括以下步骤:
2、-检测该飞行器的环境中的障碍物;
3、-确定围绕每个检测到的障碍物的保护区;
4、-确定飞行器遵循的初始轨迹;
5、-如果初始轨迹进入保护区,则基于飞行器的初始轨迹并且基于围绕每个检测到的障碍物的保护区确定经校正轨迹,使得飞行器避开保护区;
6、-将经校正轨迹应用于飞行器;以及
7、-在飞行器的飞行控制杆中输出至少一个触觉警报,该触觉警报指示当将经校正轨迹应用于飞行器时应用于飞行器的偏转的方向。
8、根据本发明的方法因此使得有可能通过校正飞行器的轨迹以便避开障碍物以及通过提供与对轨迹进行的校正相对应的人体工程学且简单的警报来辅助飞行员。
9、根据一个特定设置,该方法包括检测飞行器遵循的初始轨迹上的着陆区,所检测到的着陆区被确定为飞行器的初始轨迹的目的地,并且经校正轨迹的目的地与初始轨迹的目的地一致。
10、根据一个特定设置,每个保护区的尺寸是与飞行器的速度成比例地确定的。
11、根据一个特定设置,当飞行器悬停在环境的一点的上方时,该方法包括:
12、-确定悬停飞行器周围的静态安全区,该静态安全区以飞行器为中心并且相对于环境的所述点是静态的;
13、-检测悬停飞行器移动到静态安全区之外;
14、-将悬停飞行器重新定位在静态安全区的中心;以及
15、-在飞行器的飞行控制杆中输出至少一个触觉警报,该触觉警报指示当将飞行器重新定位在静态安全区的中心时应用于飞行器的偏转的方向。
16、根据一个特定设置,初始轨迹是使用来自传感器和检测器的数据来确定的,该传感器和检测器选自:惯性单元、相机、激光雷达、雷达、卫星定位系统、姿态确定系统。
17、根据另一方面,提出了一种包括程序代码指令的计算机程序产品,当所述指令被处理器执行时,该程序代码指令用于执行根据本发明的方法。
18、根据另一方面,提出了一种其上存储有计算机程序的非瞬态存储介质,该计算机程序包括多个程序代码指令,当从所述非瞬态存储介质中读取所述指令并且由至少一个处理器执行所述指令时,该程序代码用于执行根据本发明的方法。
19、根据另一方面,提出了一种包括电子电路系统的计算系统,该电子电路系统被配置成实现对驾驶飞行器的辅助,包括以下步骤:
20、-检测该飞行器的环境中的障碍物;
21、-确定围绕每个检测到的障碍物的保护区;
22、-确定飞行器遵循的初始轨迹;
23、-如果初始轨迹进入保护区,则基于飞行器的初始轨迹并且基于围绕每个检测到的障碍物的保护区确定经校正轨迹,使得飞行器避开保护区;
24、-将经校正轨迹应用于飞行器;以及
25、-在飞行器的飞行控制杆中输出至少一个触觉警报,该触觉警报指示当将经校正轨迹应用于飞行器时应用于飞行器的偏转的方向。
技术特征:1.一种用于辅助驾驶飞行器(1)的方法(100),所述方法由包括电子电路系统的计算系统(200)实现,并且所述方法的特征在于,它包括以下步骤:
2.如权利要求1所述的方法,其特征在于,包括:检测(104)所述飞行器(1)遵循的所述初始轨迹(10)上的着陆区(6),所检测到的着陆区(6)被确定为所述飞行器(1)的所述初始轨迹(10)的目的地,并且所述经校正轨迹(12)的目的地与所述初始轨迹(10)的目的地一致。
3.如前述权利要求中任一项所述的方法(100),其特征在于,每个保护区(8)的尺寸是与所述飞行器(1)的速度成比例地确定的。
4.如前述权利要求中任一项所述的方法(100),其特征在于,当所述飞行器(1)悬停在所述环境的一点的上方时,所述方法包括:
5.如前述权利要求中任一项所述的方法(100),其特征在于,所述初始轨迹(10)是使用来自传感器和检测器的数据来确定的,所述传感器和所述检测器选自:惯性单元、相机、激光雷达、雷达、卫星定位系统、姿态确定系统。
6.一种包括程序代码指令的计算机程序产品,所述程序代码指令用于在所述指令被至少一个处理器执行时执行根据权利要求1到5中任一项所述的方法(100)。
7.一种非暂态存储介质,其上存储有包括程序代码指令的计算机程序,当所述指令被从所述非暂态存储介质中读取并且由处理器执行时用于执行根据权利要求1到5中任一项所述的方法(100)。
8.一种包括电子电路系统的计算系统(200),所述电子电路系统被配置成实现对驾驶飞行器的辅助,包括以下步骤:
技术总结一种用于辅助驾驶飞行器的方法(100),包括以下步骤:检测(102)该飞行器的环境中的障碍物;确定(106)围绕每个检测到的障碍物的保护区;确定(108)飞行器遵循的初始轨迹;如果该初始轨迹进入保护区,则确定(110)经校正轨迹以使得该飞行器避开该保护区;将经校正轨迹应用于(112)飞行器;以及在飞行器的飞行控制杆中输出(114)至少一个触觉警报,该触觉警报指示当应用经校正轨迹时应用于飞行器的偏转的方向。因此,通过提供符合人体工程学且简单的警报辅助了驾驶,从而保证了飞行器的安全轨迹。技术研发人员:K·阿卜杜利受保护的技术使用者:空中客车简化股份公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198836.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表