一种基于积分凸包抑制的防超调增强型PI控制器及方法
- 国知局
- 2024-07-31 23:51:09
本发明属于控制,具体涉及一种基于积分凸包抑制的防超调增强型pi控制器及方法。
背景技术:
1、在直流电机pi(proportional integral)控制器调速技术中,pi控制器参数整定是一项十分重要的工作,尽管有自动和手动整定的方法,甚至参数整定的口诀,但在实际应用中需要丰富的经验,不容易把握。采用pi控制系统如果使用不恰当的pi参数,电机在启动、停止,或者调整目标转速幅度较大时,容易出现较大的超调量,甚至出现系统震荡,这是需要避免的。
2、为了解决这个问题,往往采用积分分离或者抗积分饱和的方法,这在一定程度上可以减小超调,但在具体操作时依然存在不够直观等困难。
3、现有直流电机pi控制器调速技术的主要问题是:
4、1.现有的pi控制器参数整定主要依靠经验,pi控制器参数整定困难;
5、2.不恰当的pi控制器参数整定使直流电机容易出现较大的转速超调量;
6、3.对于直流电机转速防超调现有技术一般采用积分分离或者抗积分饱和的方法,这在一定程度上可以减小超调,但在具体操作时依然存在不够直观等问题。
技术实现思路
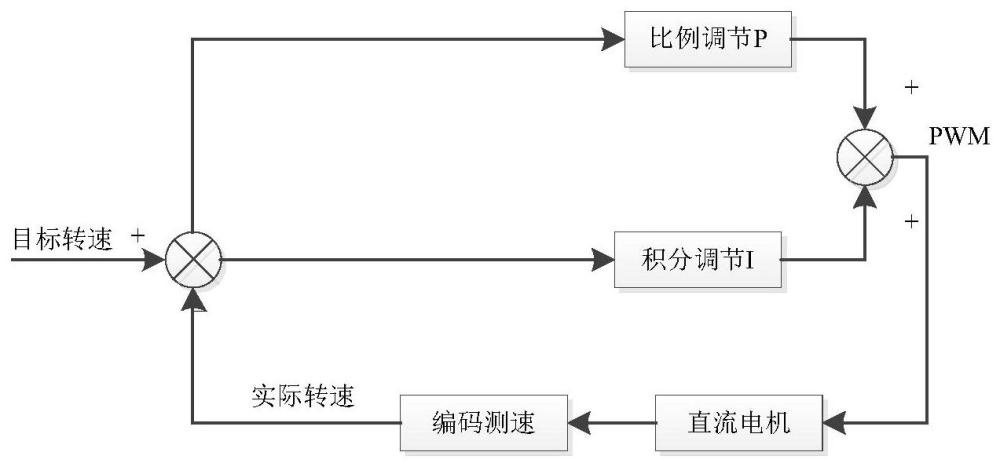
1、为了克服现有技术的不足,本发明提供了一种基于积分凸包抑制的防超调增强型pi控制器及方法,在arduino控制板中运行增强型pi控制器即epi(enhaced pi)控制器;epi控制器是在pi控制器的积分项增加一个积分阈值参数,积分增量只有在跟积分阈值比较,满足设定条件的情况下,才在pwm总量中累积该积分项;积分阈值的调节受可视化的积分凸包的指导,如果出现积分凸包,则减小积分阈值;编码直流电机将测得的转速反馈给arduino控制板,arduino控制板通过epi控制器根据编码直流电机反馈的转速计算pwm值,并通过pwm数字端口向电机驱动芯片发送驱动控制信号。本发明通过与pi控制器相比,可以更加灵活、直观地对转速超调进行控制。
2、本发明解决其技术问题所采用的技术方案如下:
3、一种基于积分凸包抑制的防超调增强型pi控制器,包括arduino控制板、电机驱动芯片、编码直流电机;
4、所述arduino控制板中运行epi控制器;
5、所述epi控制器是在pi控制器的积分项增加一个积分阈值参数,积分增量只有在跟积分阈值比较,满足设定条件的情况下,才在pwm总量中累积该积分项;积分阈值的调节受可视化的积分凸包的指导,如果出现积分凸包,则减小积分阈值;
6、编码直流电机将测得的转速反馈给arduino控制板,arduino控制板通过epi控制器根据编码直流电机反馈的转速计算pwm值,并通过pwm数字端口向电机驱动芯片发送驱动控制信号。
7、优选地,所述积分凸包是指将电机pi控制器的积分项随时间变化的关系进行可视化,绘制出的积分线在局部出现的凸包;所述比例脉冲是指电机pi控制器的比例线在局部出现的脉冲,往往出现在目标转速变化的阶跃处。
8、优选地,所述arduino框架函数setup()中除了设置初始目标转速外,还绑定了一个外部中断和一个定时中断;所述外部中断绑定编码器脉冲,脉冲中断触发时调用中断函数code(),该函数在编码电机旋转过程中对脉冲计数,为计算转速做准备;
9、每隔时间tsample,定时中断触发时调用中断处理函数rpm_measure(),该函数根据时间间隔tsample内的脉冲数计算转速,并将脉冲数清零,为下次计算转速做准备;
10、在arduino框架函数loop()里,epi控制器控制频率与定时器的采样频率相同,每隔时间tsample,根据当前速度与目标速度的差值,采用epi控制器,计算驱动电动机的pwm值。
11、优选地,所述电机驱动芯片采用l298,编码直流电机采用带编码盘的motor-encoder。
12、一种基于积分凸包抑制的防超调增强型pi控制器参数整定方法,包括如下步骤:
13、步骤1:epi控制器参数包括比例常数kp、积分常数ki、积分阈值intthr;
14、步骤2:设置积分阈值intthr为最大值,此时的epi控制器相当于pi控制器,采用pi控制器参数整定方法对pi控制器参数进行初步整定,此阶段在proteus仿真环境下进行,因而允许转速超调;
15、步骤3:结合积分凸包抑制,对积分阈值intthr从大到小进行调整,在epi控制器积分项计算过程中设置是否累加该次积分项的控制系数index和积分阈值intthr;
16、步骤4:在epi控制器中,对于积分i项,每次计算积分i项前设置index为0,当前一次pwm值大于正的极限值时,如果积分增量为负则累加该次积分增量;当前一次pwm值小于负的极限值时,如果积分增量为正则累加该次积分增量;当前一次pwm不超过正负极限值且积分值绝对值小于积分阈值intthr,累加该积分增量;这三种情况下都设置index为1,即累加本次积分增量,其余情况index为0,忽略本次积分增量;同时,观察积分曲线,如果出现积分凸包,则减小积分阈值intthr;如果出现转速静差,则增加积分阈值intthr;重复上述过程,直到既没有积分凸包,也无转速静差,即在没有超调的情况下实现实际转速与目标转速相同,此时的kp、ki、intthr即为最终的epi控制器参数。
17、本发明的有益效果如下:
18、1、积分凸包能可视化地反映转速超调,抑制积分凸包则可消除转速超调。
19、2、在pi控制器中引入积分阈值参数构成新的增强型epi控制器。通过调节积分阈值参数,能可视化地调节积分凸包,进而实现超调抑制。
20、3、通过与pi控制器相比,基于凸包抑制的增强型epi控制器可以更加灵活、直观地对转速超调进行控制。
21、4、epi控制下的转速超调随着积分阈值的减小而减小,这不仅证实了epi控制器有效,也为积分阈值的调整提供了方向性参考,但阈值过小,会出现静差。所以需要根据积分凸包,调整合适的积分阈值。
技术特征:1.一种基于积分凸包抑制的防超调增强型pi控制器,其特征在于,包括arduino控制板、电机驱动芯片、编码直流电机;
2.根据权利要求1所述的一种基于积分凸包抑制的防超调增强型pi控制器,其特征在于,所述积分凸包是指将电机pi控制器的积分项随时间变化的关系进行可视化,绘制出的积分线在局部出现的凸包;所述比例脉冲是指电机pi控制器的比例线在局部出现的脉冲,往往出现在目标转速变化的阶跃处。
3.根据权利要求1所述的一种基于积分凸包抑制的防超调增强型pi控制器,其特征在于,所述arduino框架函数setup()中除了设置初始目标转速外,还绑定了一个外部中断和一个定时中断;所述外部中断绑定编码器脉冲,脉冲中断触发时调用中断函数code(),该函数在编码电机旋转过程中对脉冲计数,为计算转速做准备;
4.根据权利要求1所述的一种基于积分凸包抑制的防超调增强型pi控制器,其特征在于,所述电机驱动芯片采用l298,编码直流电机采用带编码盘的motor-encoder。
5.一种如权利要求1所述的增强型pi控制器的参数整定方法,其特征在于,包括如下步骤:
技术总结本发明公开了一种基于积分凸包抑制的防超调增强型PI控制器及方法,在Arduino控制板中运行增强型PI控制器即ePI(enhaced PI)控制器;ePI控制器是在PI控制器的积分项增加一个积分阈值参数,积分增量只有在跟积分阈值比较,满足设定条件的情况下,才在PWM总量中累积该积分项;积分阈值的调节受可视化的积分凸包的指导,如果出现积分凸包,则减小积分阈值;编码直流电机将测得的转速反馈给Arduino控制板,Arduino控制板通过ePI控制器根据编码直流电机反馈的转速计算PWM值,并通过PWM数字端口向电机驱动芯片发送驱动控制信号。本发明通过与PI控制器相比,可以更加灵活、直观地对转速超调进行控制。技术研发人员:乐万德,曹敬馨,刘洲洲,程传旭,王钰受保护的技术使用者:西安航空学院技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198839.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表