基于工业控制的智能化设备调节控制方法及系统
- 国知局
- 2024-07-31 23:55:14
本发明涉及人工智能,具体为基于工业控制的智能化设备调节控制方法及系统。
背景技术:
1、在工业生产中,提高生产效率、降低能源消耗是企业追求的目标之一,五轴联动机床作为重要的加工设备,在零件加工中起着关键作用。当前,随着传感器技术和数据处理技术的发展,工业设备可以实时采集各种数据,如机床运行数据、刀具状态数据等,通过对这些数据的分析和处理,可以实现智能化的设备控制和优化。
2、传统的加工方法往往依赖于经验和手工调整,缺乏智能化和自动化程度,这导致了加工效率低下、能源消耗高和加工精度不稳定等问题。由于缺乏智能化调节,传统的加工设备在加工过程中能耗较高,效率低下,无法充分利用能源和设备资源。在传统方法中,由于操作人员的技术水平和经验不同,加工精度和稳定性往往难以保证,刀具的运动轨迹规划和各轴的运动参数确定不够精确,容易导致加工过程中出现偏差,影响加工质量。
技术实现思路
1、本发明的目的在于提供基于工业控制的智能化设备调节控制方法及系统,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
3、基于工业控制的智能化设备调节控制方法,所述方法包括以下步骤:
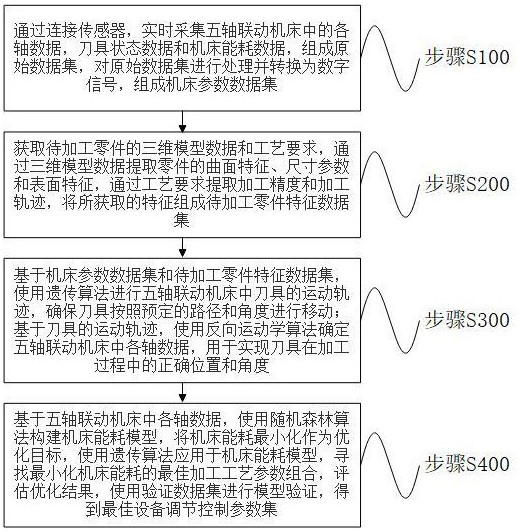
4、s100、通过连接传感器,实时采集五轴联动机床中的各轴数据,刀具状态数据和机床能耗数据,组成原始数据集,对原始数据集进行处理并转换为数字信号,组成机床参数数据集;
5、s200、获取待加工零件的三维模型数据和工艺要求,通过三维模型数据提取零件的曲面特征、尺寸参数和表面特征,通过工艺要求提取加工精度和加工轨迹,将所获取的特征组成待加工零件特征数据集;
6、s300、基于机床参数数据集和待加工零件特征数据集,使用遗传算法进行五轴联动机床中刀具的运动轨迹,确保刀具按照预定的路径和角度进行移动;基于刀具的运动轨迹,使用反向运动学算法确定五轴联动机床中各轴数据,用于实现刀具在加工过程中的正确位置和角度;
7、s400、基于五轴联动机床中各轴数据,使用随机森林算法构建机床能耗模型,将机床能耗最小化作为优化目标,使用遗传算法应用于机床能耗模型,寻找最小化机床能耗的最佳加工工艺参数组合,评估优化结果,使用验证数据集进行模型验证,得到最佳设备调节控制参数集。
8、根据步骤s100,所述各轴数据包括五轴联动机床中x轴、y轴、z轴、a轴和b轴的位置、角度、速度和加速度,所述刀具状态数据包括切削速度、刀具旋转速度、切削力、刀具磨损系数和材料与刀具的相关性常数,所述机床能耗数据包括总能耗和能耗效率;通过加权移动平均对原始数据集进行噪声过滤处理,对去噪后的数据进行平滑处理,以消除数据中的突变和抖动;进行异常值检测和处理,对原始数据中是模拟信号的数据进行数模转换,对转换后的数字信号进行归一化处理,将数据范围缩放到[-1, 1]的范围内。
9、步骤s300包括:
10、s301、获取机床参数数据集和待加工零件特征数据集;
11、s302、使用遗传算法,通过初始化种群、适应度评估、选择操作、交叉操作、变异操作和重复迭代的步骤,规划五轴联动机床中刀具的运动轨迹;
12、s303、根据遗传算法得到的刀具轨迹,确定每个时刻刀具所在位置和姿态,使用反向运动学算法,根据每个时刻刀具所在位置和姿态,求解五轴联动机床中各轴数据,确保所求解的运动参数能够使刀具在加工过程中达到预定的位置和角度。
13、步骤s302包括:
14、s302-1、随机生成一组初始的个体,每个个体代表一条刀具的运动轨迹,个体的表示是一系列的刀具运动参数组合,组成一个种群;设种群大小为n,每个个体由m个运动参数组成,则所述种群表示为一个n * m的矩阵,其中每行代表一个个体,每列代表一个刀具运动参数;所述刀具运动参数组合中包括刀具在加工过程中的位置和姿态;
15、s302-2、使用线性加权法计算每个个体的适应度,设计适应度函数;
16、s302-3、根据适应度评估结果,选择出适应度较高的个体,作为下一代种群的父代,采用选择算子从当前种群中进行选择,使用轮盘赌选择作为选择策略;
17、s302-4、对父代种群中的个体进行交叉操作和变异操作,产生新的个体,增加种群的多样性,交叉操作和变异操作的具体方式取决于所选择的算子,所述交叉操作采用均匀交叉,所述变异操作采用随机变异;
18、s302-5、重复进行选择、交叉和变异操作,直到达到用户设置的收敛条件。
19、根据步骤s302-1,随机生成一组初始的个体时,在预定义的范围内随机生成参数值;刀具的位置参数描述了刀具在空间中的位置,用刀具在空间中的x、y、z轴组成的坐标系表示,通过调整刀具的位置参数的数值,能够实现刀具在空间中的移动;刀具的姿态使用旋转角度进行表示,通过调整旋转角度的数值,能够实现刀具在空间中的旋转,从而与刀具的位置参数一起构成刀具的运动轨迹。
20、根据步骤s302-2,所述适应度函数将考虑机床参数数据集和待加工零件特征数据集中的部分数据和计算得到的数据,并将这些数据加权求和,以得到每个个体的适应度值,适应度函数的参数包括以下指标:刀具路径与加工轨迹的匹配程度,用距离量d表示;加工时间,用t表示;机床能耗,用e表示;加工精度,用acc表示;
21、其中,所述刀具路径与加工轨迹的匹配程度通过随机生成的个体的刀具路径与待加工零件特征数据集中的加工轨迹进行计算,设加工轨迹由点集表示,刀具路径由点集表示,使用hausdorff距离度量两条路径之间的匹配程度,hausdorff距离定义为:
22、;
23、其中:,;
24、加工时间通过机床参数数据集和待加工零件特征数据集中的部分数据进行计算;
25、适应度函数ada表示为:;
26、其中,是刀具路径与加工轨迹的匹配程度的权重,是加工时间的权重,是机床能耗的权重,是加工精度的权重;、、和由用户根据零件的曲面特征、尺寸参数和表面特征,以及加工精度进行调整。
27、在计算加工时间时,从待加工零件特征数据集中提取加工轨迹,将加工轨迹分成若干小段,每段对应一个刀具的直线或圆弧运动,对于每一小段,根据机床的运动参数和刀具状态数据进行时间计算;
28、对于一段直线运动,从点到,从机床参数数据集中获取该段的切削速度、切削力和材料与刀具的相关性常数;通过切削力和材料与刀具的相关性常数c计算进给速度,公式为:;确定移动速度,其中是该段的切削速度;使用以下公式计算时间:
29、;
30、其中,是该段的直线运动时间;
31、对于旋转运动,从姿态到,使用公式计算时间:
32、;
33、其中,是该段的刀具旋转速度,该段的旋转时间;
34、将每段的和累加,结合刀具状态数据中的刀具磨损系数wat,得到加工时间t,公式如下:
35、。
36、根据步骤s302-3,轮盘赌选择是一种常用的选择策略,用于根据个体的适应度来选择父代个体。其基本思想是将适应度较高的个体分配更多的选择机会,从而增加其被选中的概率,以提高遗传算法的收敛性和搜索效率。
37、首先,根据每个个体的适应度计算适应度比例,适应度比例可以通过将每个个体的适应度除以种群中所有个体的适应度之和得到。将适应度比例映射到轮盘上,构建一个轮盘赌,使适应度较高的个体对应的扇形区域更宽,适应度较低的个体对应的扇形区域更窄。轮盘赌的半径是1,而每个扇形区域的长度是该个体的适应度比例。从构建好的轮盘赌中随机选择一个起始位置,然后依次进行选择。随机选择一个0到1之间的随机数作为轮盘赌的指针,指针指向的扇形区域对应的个体即被选中作为父代个体。重复以上步骤,直到选择足够数量的父代个体,组成下一代种群。
38、根据步骤s303,通过已知的刀具末端位置,计算机床在工作空间中的位置,设机床基座到刀具末端的变换矩阵为t:;其中,r是旋转矩阵,k是位置向量;
39、通过已知的刀具末端姿态,计算刀具相对于基座的旋转角度,设旋转矩阵r为:,其中,表示绕x轴旋转角度的旋转矩阵,表示绕y轴旋转角度的旋转矩阵;
40、通过变换矩阵t和旋转矩阵r,反向求解各轴的位置和角度:
41、,,,,;
42、通过求解的各轴的位置和角度,能够通过时间间隔推算出各轴的速度和加速度。
43、根据步骤s400,使用随机森林算法构建机床能耗模型,通过构建若干棵决策树进行预测,将五轴联动机床中各轴数据分为训练集和验证集,使用训练集进行模型训练,使用验证集进行模型验证和调参,通过若干次迭代训练,调整随机森林的超参数,以获得最优的能耗预测模型;
44、在构建每棵决策树时,随机选择一部分样本和一部分特征进行训练。这样可以增加决策树的多样性,减少过拟合。根据随机选择的样本和特征,构建一棵决策树。在构建过程中,根据一定的条件将数据集分割成不同的子集,直到达到停止条件,例如节点中的样本数达到预定阈值,或者树的深度达到预定的最大深度。重复上述步骤,构建多棵决策树,形成随机森林。
45、对于分类任务,采用投票法;对于回归任务,采用平均法。即通过多个决策树的综合结果来进行最终的分类或回归预测。
46、将机床能耗最小化作为优化目标,定义目标函数,目标函数des表示为:,其中tec是总能耗,ee是能源效率,是目标函数的权重参数,用于平衡总能耗和能耗效率;使用遗传算法对目标函数进行优化,寻找最小化机床能耗的最佳加工工艺参数组合;对遗传算法得到的最佳加工工艺参数组合进行评估,计算总能耗和能耗效率,使用验证数据集对优化结果进行。
47、基于工业控制的智能化设备调节控制系统,包括:
48、传感器数据采集模块:实时采集五轴联动机床中的各轴数据、刀具状态数据和机床能耗数据,包括:传感器接口单元和数据处理单元;其中,传感器接口单元负责与传感器进行通信和数据采集,数据处理单元负责对采集到的原始数据进行预处理和转换,组成机床参数数据集;
49、零件特征获取模块:获取待加工零件的三维模型数据和工艺要求,提取零件特征用于加工规划,包括:cad数据解析单元和工艺要求解析单元;其中,cad数据解析单元用于解析三维模型数据,提取零件的曲面特征、尺寸参数和表面特征,工艺要求解析单元用于解析工艺要求,提取加工精度和加工轨迹信息;
50、刀具运动规划模块:使用遗传算法进行五轴联动机床中刀具的运动轨迹规划,包括:遗传算法优化单元、适应度计算单元和反向运动学求解单元;其中,遗传算法优化单元负责实现遗传算法的初始化、选择、交叉和变异操作,适应度计算单元负责计算每个个体的适应度,评估刀具路径与加工轨迹的匹配程度,反向运动学求解单元负责根据刀具的运动轨迹规划,使用反向运动学算法求解五轴联动机床中各轴数据,确保刀具在加工过程中的正确位置和角度;
51、能耗模型构建与优化模块:使用随机森林算法构建机床能耗模型,并通过遗传算法优化加工参数以最小化能耗,包括:随机森林模型构建单元和遗传算法优化单元;其中,随机森林模型构建单元负责基于各轴数据和能耗数据构建机床能耗模型,遗传算法优化单元负责使用遗传算法寻找最佳加工工艺参数组合,以最小化机床能耗。
52、与现有技术相比,本发明所达到的有益效果是:
53、本发明利用随机森林算法构建机床能耗模型,并通过遗传算法优化加工工艺参数,能够有效降低机床的能耗,节约能源成本,符合节能减排的现代工业要求。
54、本发明通过遗传算法优化加工工艺参数,结合五轴联动机床的运动轨迹规划和反向运动学算法确定各轴数据,可以使刀具在加工过程中始终保持正确的位置和角度,从而优化加工工艺,提高加工质量和稳定性。
55、本发明能够根据待加工零件特征数据集和工艺要求,灵活调整加工工艺参数,适应不同类型和要求的零件加工,提升了生产线的灵活性和适应性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199172.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表