一种冰区智能船队跟驰与控制方法
- 国知局
- 2024-07-31 23:57:37
本发明涉及船舶安全航行仿真技术和船舶速度预测等技术,具体涉及一种冰区智能船队跟驰与控制方法。
背景技术:
1、全球变暖的现象使人们开始关注极地开发。海冰加速融化,使得人类对北极的资源开发计划提上日程。与传统开放水域的航运相比,极地航运的优势在于能够减少航行时间和能源消耗。智能交通背景下,无人驾驶等技术的出现给海运风险检测模型提出了更高的要求,比如更好的适用性,更高的准确性等等,智能船舶技术的发展为保障冰区的航行安全提供了有效的解决方案。冰区航行通过多艘智能船舶组成船队,以跟驰的方式,共享破冰船的护航服务有助于提高破冰船的使用效率。冰区海面可能发生大雾天气,能见度低,且海冰顺着洋流不断运动,尤其是压缩冰的存在,航道可能存在封闭的情况,使得船舶行驶在狭窄的冰间航道容易产生冰困风险。由于海冰的存在,冰区的船舶作业模式与开放水域有显著区别,多采用船舶编队的方式航行,因而船船碰撞风险是冰区航行中常见的风险。设计出适合冰区航行的智能船队跟驰与控制模型能够有效节约人力资源、降低航行风险和减少能源消耗。
2、shu等人建立了一种基于最优控制的创新模型,在考虑破冰和不破冰影响的情况下,对北方航道(nsr)水域中包括破冰船和跟随船在内的船队在连续时间和空间上的航行路径进行优化。liu等人对“天佑”号2018年在在北极东北航道的首次航行的数据进行分析,建立了运输成本最低、排放最低、航行时间最短的三种船舶跟船模式多目标优化模型,采用mopso和nsgaii算法计算船舶速度最优解。目前对于冰区船舶编队的研究多集中于船队跟驰模型的建立,zhang等人建立了两艘船之间的动力学模型,zhang等人在考虑船舶安全速度和安全船头间距的基础上建立了冰区多船跟驰模型,zhang等人建立了基于船联网的冰区多船跟驰模型并评估系统稳定性。zhang等人基于车辆跟驰模型分析了极地航线存在的航行阻力建立了适用于北极航线的交通流跟驰模型。
3、当前对于船舶编队控制的研究主要集中在开阔水域的船队队形保持、避碰技术、路径规划和轨迹跟踪方面,船队通信、特殊水域、有人/无人船舶共融、不确定干扰等方面研究较少。
技术实现思路
1、本发明的目的在于提供了一种冰区智能船队跟驰与控制方法。
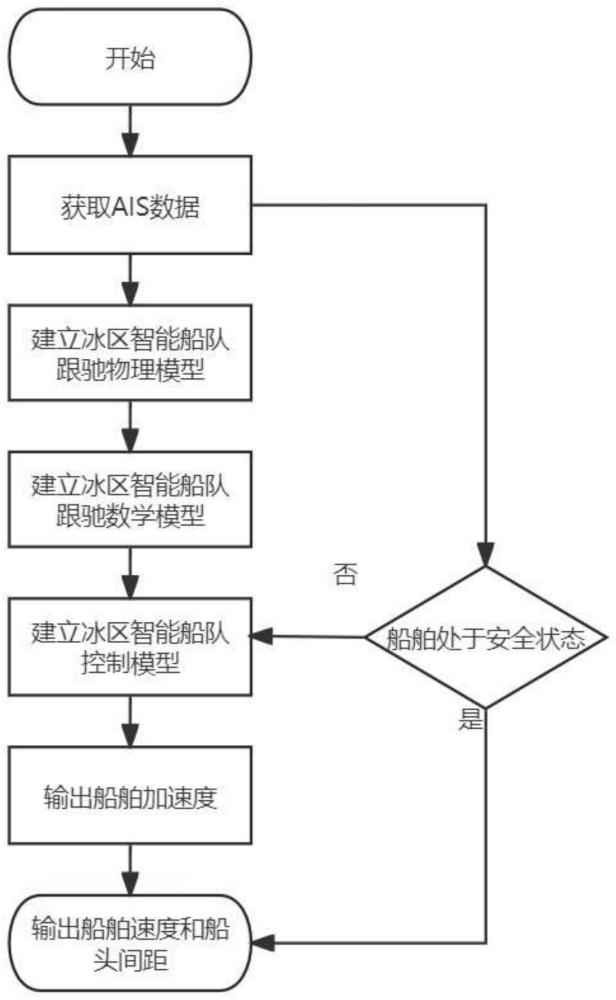
2、实现本发明目的技术解决方案为:一种冰区智能船队跟驰与控制方法,具体过程包括以下步骤:
3、步骤一:建立冰区智能船队跟驰物理模型,获取船队航行的航行数据,包括速度、船头间距、船舶参数、海冰类型和海冰厚度;
4、步骤二:引入当前船与其他船的速度差、期望船头间距和海冰阻力对船舶加速度的影响,以控制船舶加速度为目标,建立存在时滞的改进mvd冰区智能船队跟驰模型;
5、步骤三:以实际船头间距与期望船头间距的误差函数为输入,结合pid算法设计滑模面,根据步骤二建立的冰区智能船队跟驰模型和lyapunov稳定性第二定理设计smc-pid控制器;
6、步骤四:针对待控制船舶,获取该船舶与前一船舶的平均速度和船头间距,聚类分析得到船舶航行的安全域,结合该船舶与前一船舶的速度差范围,进一步确定船舶航行的状态;
7、步骤五:利用smc-pid控制器,控制处于非安全状态的船舶加速度。
8、步骤一,建立冰区智能船队跟驰物理模型,获取船队航行的航行数据,包括速度、船头间距、船舶参数、海冰类型和海冰厚度,其中:
9、冰区智能船队物理模型中,领航船为由船员驾驶的破冰船,跟随船均为自动驾驶的智能船舶;
10、船舶航行数据通过ais采集得到,采样时间间隔为10s。
11、步骤二,以控制船舶加速度为目标,引入当前船与其他船的速度差、期望船头间距和海冰阻力对船舶加速度的影响,建立存在时滞的改进mvd冰区智能船队跟驰数学模型,其中:
12、期望船头间距对船舶加速度的影响的关系式定义如下:
13、
14、δxdi(t)=v-1(v0(t))
15、
16、其中,θ表示当船舶的实际相对船头间距δxi(t)等于期望船头间距δxd(x)时,最优速度的导数,c(δxi(t))表示船间距为δxi(t)时的最优速度,δxci表示第i艘船与第i-1艘船的安全船头间距,即能够保持船舶处于安全状态的最小船头间距,v0(t)表示期望船速;
17、海冰阻力对船舶加速度的影响的关系式定义如下:
18、
19、
20、mg=ρwgvd=1×103g×l×w×d×cb
21、式中,rbr表示海冰对船舶施加的阻力,σf表示海冰弯曲强度,h表示冰厚,v表示船舶当前速度,m表示船舶质量,b表示船舶宽度,g表示重力加速度,ρw表示海水密度,vd表示船舶体积,l表示船舶长度,w表示船舶宽度,d表示船舶吃水深度,cb表示块系数;
22、以控制船舶加速度为目标,建立存在时滞的mvd冰区智能船队跟驰数学模型定义如下:
23、
24、式中,表示敏感度系数,τ表示反应时间,δvj(t)=vj(t)-vi(t)表示速度差,σj表示δvj(t)的反应系数,σi满足vi(t)表示船队中第i艘船在时间t的速度,δxi(t)表示船i与船i-1的船头间距,δ表示误差系数,δδxi(t)=δxi(t)-v-1(v0(t))表示实际船头间距与期望船头间距的误差,δvi(t)=vi(t)-v0(t)表示实际速度与期望船速的误差,ui(t)表示控制量。
25、步骤三,以实际船头间距与期望船头间距的误差函数为输入,结合pid算法设计滑模面,根据步骤二建立的冰区智能船队跟驰数学模型和lyapunov稳定性第二定理设计smc-pid控制器,其中:
26、步骤3.1,以实际船头间距与期望船头间距的误差函数为输入,结合pid算法设计滑模面,具体如下:
27、2)实际船头间距与期望船头间距的误差e的关系式定义如下:
28、e=δδxi(t)=δxi(t)-v-1(v0(t))
29、
30、2)结合pid算法设计的滑模面函数si,表达式定义如下:
31、
32、式中,sgn(ei(t))为符号函数,0<α<1;
33、步骤3.2,根据建立的冰区智能船队跟驰数学模型和lyapunov稳定性第二定理设计smc-pid控制器,表达式定义如下:
34、
35、式中,ε>0,k>0,delta为常数,sat(si)为饱和函数。
36、步骤四,针对待控制船舶,获取该船舶与前一船舶的平均速度和船头间距,进行聚类分析得到船舶航行的安全域,结合该船舶与前一船舶的速度差范围,进一步确定船舶航行的状态,具体方法为:
37、步骤4.1,针对待控制船舶,获取该船舶与前一船舶的平均速度和船头间距,进行聚类分析得到船舶航行的安全域;
38、步骤4.1.1,计算平均速度和船头间距数据符合的高斯分布模型f(x),表示如下:
39、
40、
41、其中,船舶数据样本x={s1,s2}表示平均速度和船头间距数据,y={1,2,…n}表示所有可能的状态种类,θ={1,2,…n}表示数据样本x的高斯混合成分,p(θ=i|s1,s2)表示数据样本x={s1,s2}由第i个高斯混合成分生成的后验概率,p(y=j|θ=i,s1,s2)表示数据样本由第i个高斯混合成分生成且类别为j的概率,ai表示混合系数,满足ai≥0且μi和∑i表示高斯混合成分的均值和协方差;
42、步骤4.1.2,通过em算法对速度和船头间距数据进行聚类分析,得出由平均速度和船头间距综合表示的安全域;
43、步骤4.1.2.1,计算根据当前的高斯混合模型参数,计算未标记数据集属于各高斯混合分量的概率γji,其表达式定义如下:
44、
45、步骤4.1.2.2,记标记为第i类高斯混合成分的数据样本数量为li,其数据集为dl={(x1,y1),(x2,y2),…,(xl,yl)},记未标记的数据集为du={xl+1,xl+2,…,xl+u},l和u满足l+u=m,m表示数据样本总量,根据γji更新高斯分布模型参数,其中ai、μi和∑i表达式定义如下:
46、
47、
48、
49、步骤4.1.2.2得到的参数估计值被用于下一个步骤5.1.2.1计算中,此过程不断迭代,输出船舶数据样本中各组平均速度和船头间距数据对应的聚类类别,得到船舶航行的安全域;
50、步骤4.2,对安全域根据船舶速度差进一步分类,得到由速度差,平均速度和船头间距综合表示的状态,对相邻船舶速度差的范围限制如下:当速度差范围是(-∞,-1)∪(1,+∞)(kn)时,两船速度差过大,视为不安全状态;当速度差范围是(-1,1)(kn)时,速度差合理,视为安全状态,若船舶处于安全状态,则保持当前航行行为,若船舶处于非安全状态,则对船舶加速度进行控制。
51、一种冰区智能船队跟驰与控制系统,实施所述的冰区智能船队跟驰与控制方法,实现冰区智能船队跟驰与控制。
52、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施所述的冰区智能船队跟驰与控制方法,实现冰区智能船队跟驰与控制。
53、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施所述的冰区智能船队跟驰与控制方法,实现冰区智能船队跟驰与控制。
54、本发明与现有技术相比,其显著优点在于:(1)将描述船舶航行安全的一维安全速度或安全船头间距转换为二维的状态;(2)通过对于船舶实际情况的考虑:海冰、通信延迟、船舶自身性能带来的迟滞、前船和后船的影响,从而进一步提高模型的预测精度;(3)结合了pid算法和smc控制方法的优势,在保证仿真船舶拥有良好的跟踪前船航行行为的能力的同时,优化了航行行为,使仿真结果更为平滑。(4)预先判断船舶所处状态是否安全后,控制处于非安全状态的船舶加速度,减少了不必要的加减速行为,节约资源。
55、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199393.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表