一种新型水下无人破障系统的制作方法
- 国知局
- 2024-08-01 00:09:09
本发明涉及一种新型水下无人破障系统。
背景技术:
1、水下破障,是海军作战面临的重要难题。
2、目前,现有水下障碍物主要清理手段的缺点:
3、1)蛙人
4、蛙人在水下行动适应能力强,可执行多类型、复杂程度高的任务,但针对岸滩水下破障行动,蛙人的缺点一是我军控制海域距离台岸滩约24海里,蛙人难以隐蔽到达任务地点,有效航程不足;二是台岸滩障碍物主要为扭八字块、轨条砦等大型、坚固障碍物,要对此类障碍物进行有效爆破需要大吨量爆破药,而蛙人可携带爆破药有限。
5、2)水面无人破障艇
6、水面无人破障艇机动性强,爆破威力大,但针对岸滩水下破障行动,水面无人破障艇的主要缺点一是无法提前隐蔽预置,在行动开始前我军需要已经取得制海权、制空权,使用有较大制约;二是水面无人破障艇无法探测敌水下障碍物部署情况,需要在行动开始前提前;三是水面无人破障艇破障范围主要为水下0-2m的障碍物,而我军主要登陆装备071、072吃水深度均超过5m,破障效果不足以支撑我军登岛作战。
7、3)深水炸弹
8、深水炸弹价格便宜,使用可靠性高,破坏威力巨大,但针对岸滩水下破障行动,深水炸弹的主要缺点一是无法提前隐蔽预置,在行动开始前我军需要已经取得制海权、制空权,使用有较大制约;二是水面无人破障艇无法探测敌水下障碍物部署情况,需要在行动开始前提前;三是使用时需要飞机低空投送,爆破精准度较差。
9、现有arv(复合型水下机器人)的缺点:
10、现有arv最长通信距离约为11km,无法满足登岛作战的长距离隐蔽航行的需求,且现有arv均不携带爆破作业系统,不具备大规模精确破障能力。
11、因此,提供一种新型水下无人破障系统。
技术实现思路
1、本发明的目的在于克服现有的缺陷而提供的一种新型水下无人破障系统,有效的实现水下障碍物的清除。
2、实现上述目的的技术方案是:
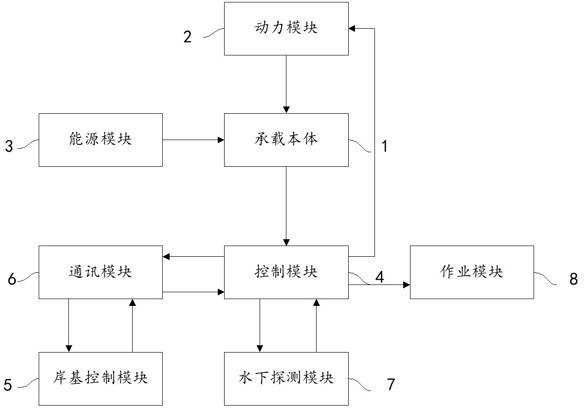
3、一种新型水下无人破障系统,包括:
4、承载本体,用于搭载爆破索,形成arv;
5、动力模块,用于驱动所述arv在水下进行运动;
6、能源模块,用于为所述arv供电;
7、控制模块,用于接收控制指令,驱动控制所述arv,并采集所述arv舱体内外部数据;
8、岸基控制模块,用于下发控制指令,并接收所述控制模块采集的舱体内外部数据,用于所述arv的远程控制,监视所述arv的运行状态和作业情况;
9、通讯模块,用于所述控制模块与岸基控制模块之间的信息传输;
10、水下探测模块,用于复杂水域条件下的环境观测与物体探测;
11、作业模块,用于所述arv的爆破索运送、投放和障碍物清理作业任务。
12、优选的,所述承载本体采用框架结构设计,尺寸为5090mm×1920mm×1220mm,搭载爆破索后的高度为1400mm,所述承载本体搭载爆破索的浮材采用玻璃微珠材质,密度0.36g/cm³,耐压强度18mpa,24h吸水率≤3%,并在浮材外表面使用聚脲喷涂和高光漆丝印工艺进行处理。
13、优选的,所述动力模块包括8个螺旋桨推进器,4个水平方向设置,4个垂直方向设置,其中,水平方向的4个螺旋桨推进器采用矢量布局方案,采用22.5°夹角对称布置。
14、优选的,所述能源模块为锂电池,锂电池单节尺寸直径18mm,长度65mm,共设置23x150节。
15、优选的,所述控制模块包括:
16、主控制单元,用于检测舱内环境数据,接收采集的所述arv的各数据信息和水下检测数据,发送至所述岸基控制模块,并接收所述岸基控制模块的控制指令;
17、其中,水下检测数据包括水下高清视频数据和声呐图像,控制指令包括但不限于控制所述动力模块的速度、爆破索投放、爆破索脱离;
18、导航单元,用于通过舱内设置的光纤惯导器件、深度计、gnss(卫星导航系统)接收机接收采集的所述arv的各数据信息,并发送至所述主控制单元;
19、其中,所述arv的各数据信息包括所述arv的三轴的角度、角速度以及加速度,dvl三轴速度、经纬度、以及舱体内部状态。
20、优选的,所述岸基控制模块包括:
21、工控单元,用于接收所述主控制单元采集的所述arv的各数据信息,进行展示;
22、控制手柄,用于操作人员对所述arv进行遥控控制,下发控制指令。
23、优选的,所述工控单元由三个显示屏组成,单个显示屏尺寸为17寸,显示屏分辨率为1920*1080;所述控制手柄上设置有lcd(液晶显示器)显示屏,用于显示当前操控指令信息。
24、优选的,所述通讯模块采用两根单模光纤实现所述主控制单元和工控单元之间的通讯。
25、优选的,所述水下探测模块包括:
26、光学探测单元,用于通过安装在所述arv上的摄像机和led(发光二极管)灯监测水下高清视频数据,监测爆破索运送过程、布放状态以及拖曳展开情况,辅助实施障碍物切割清理作业,并将监测的数据传输至所述主控制单元;
27、声学探测单元,用于通过安装在所述arv上的二维多波束图像声呐采集到的声呐图像传输至所述主控制单元。
28、优选的,所述作业模块包括:
29、爆破索运送单元,用于实现爆破索的固定、依次投放、牵引、脱离操作;
30、两个机械臂,安装在所述arv艏部,一个所述机械臂末端搭载夹爪,用于负责抓取固定网具,另一个所述机械臂末端搭载切割盘,在网具固定后进行切割作业。
31、本发明的有益效果是:本发明提供了一个提前隐蔽预置、隐蔽航行、大规模破障的arv,解决了现有破障手段无法有效清除敌岸滩水下2-7m障碍物的问题,实现了水下探测和作业任务,具备爆破索运送和投放、水下障碍物识别和检测、水下障碍物清理等功能,具备完成复杂环境下的海洋作业任务能力,满足了水下障碍物清除的需要。
技术特征:1.一种新型水下无人破障系统,其特征在于,包括:
2.根据权利要求1所述的一种新型水下无人破障系统,其特征在于,所述承载本体采用框架结构设计,尺寸为5090mm×1920mm×1220mm,搭载爆破索后的高度为1400mm,所述承载本体搭载爆破索的浮材采用玻璃微珠材质,密度0.36g/cm³,耐压强度18mpa,24h吸水率≤3%,并在浮材外表面使用聚脲喷涂和高光漆丝印工艺进行处理。
3.根据权利要求1所述的一种新型水下无人破障系统,其特征在于,所述动力模块包括8个螺旋桨推进器,4个水平方向设置,4个垂直方向设置,其中,水平方向的4个螺旋桨推进器采用矢量布局方案,采用22.5°夹角对称布置。
4.根据权利要求1所述的一种新型水下无人破障系统,其特征在于,所述能源模块为锂电池,锂电池单节尺寸直径18mm,长度65mm,共设置23x150节。
5.根据权利要求1所述的一种新型水下无人破障系统,其特征在于,所述控制模块包括:
6.根据权利要求5所述的一种新型水下无人破障系统,其特征在于,所述岸基控制模块包括:
7.根据权利要求6所述的一种新型水下无人破障系统,其特征在于,所述工控单元由三个显示屏组成,单个显示屏尺寸为17寸,显示屏分辨率为1920*1080;所述控制手柄上设置有lcd显示屏,用于显示当前操控指令信息。
8.根据权利要求6所述的一种新型水下无人破障系统,其特征在于,所述通讯模块采用两根单模光纤实现所述主控制单元和工控单元之间的通讯。
9.根据权利要求8所述的一种新型水下无人破障系统,其特征在于,所述水下探测模块包括:
10.根据权利要求1所述的一种新型水下无人破障系统,其特征在于,所述作业模块包括:
技术总结本发明公开了一种新型水下无人破障系统,包括:承载本体,用于搭载爆破索,形成ARV;动力模块,用于驱动所述ARV在水下进行运动;控制模块,用于接收控制指令,驱动控制所述ARV,并采集所述ARV舱体内外部数据;岸基控制模块,用于下发控制指令,并接收所述控制模块采集的舱体内外部数据,用于所述ARV的远程控制,监视所述ARV的运行状态和作业情况;通讯模块,用于所述控制模块与岸基控制模块之间的信息传输;水下探测模块,用于复杂水域条件下的环境观测与物体探测;能源模块,用于为所述ARV供电;作业模块,用于所述ARV的爆破索运送、投放和障碍物清理作业任务。本发明有效的实现了水下障碍物的清除。技术研发人员:李梓涵,管晓乐,陈操斌受保护的技术使用者:航天科工空天动力研究院(苏州)有限责任公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表