一种基于井下矿车远程驾驶舱多级安全冗余保障系统的制作方法
- 国知局
- 2024-08-01 00:13:12
本发明涉及无人驾驶,具体为一种基于井下矿车远程驾驶舱多级安全冗余保障系统。
背景技术:
1、随着无人驾驶技术的迅猛发展,应用该技术的领域也不断增多,然而,在实际的工程应用中,无人驾驶仍然存在不少技术难点,为了保证井下矿区无人系统作业安全和高效,必须具备良好的容错及故障处理机制,当无人驾驶系统出现异常时,应具完善的应对机制,用于解决出现的问题,保障作业安全及高效的接续工作,尽可能减少经济损失,因此多级安全冗余保障变得十分重要。
2、目前井下遥控驾驶系统应用较少,且一般遥控驾驶系统均采用直接点对点遥控视频推收流,进行实时监控和遥控控制,遥控端与被遥控车辆直接进行数据交互,其中视频传输主要通过rtsp协议实现,控制指令多采用广播udp报文下发,针对井下遥控场景,目前主要采用近场遥控作业,受限于网络条件,一般由现场运维操作人员手持遥控器进行遥控作用,作业效率与安全均有作业人员保证。
3、以此,现有井下遥控作业稳定性受限于网络环境与现场运维,其安全和效率没法保证,遥控端布置在井下或距离作业区域较近的距离无法重根本上保障操作人员安全,而且井下环境复杂,这也导致遥控作业效率较低,同时完全依赖操作人员操作无法应对突发的紧急状况,为此本发明提供了一种基于井下矿车远程驾驶舱多级安全冗余保障系统。
技术实现思路
1、针对现有技术存在的上述不足,本发明提供了一种基于井下矿车远程驾驶舱多级安全冗余保障系统,为解决井下矿区无人驾驶应用中,纯无人运行时出现的突发故障等异常情况,保障作业安全与工作接续,提高遥控作业安全性与效率。
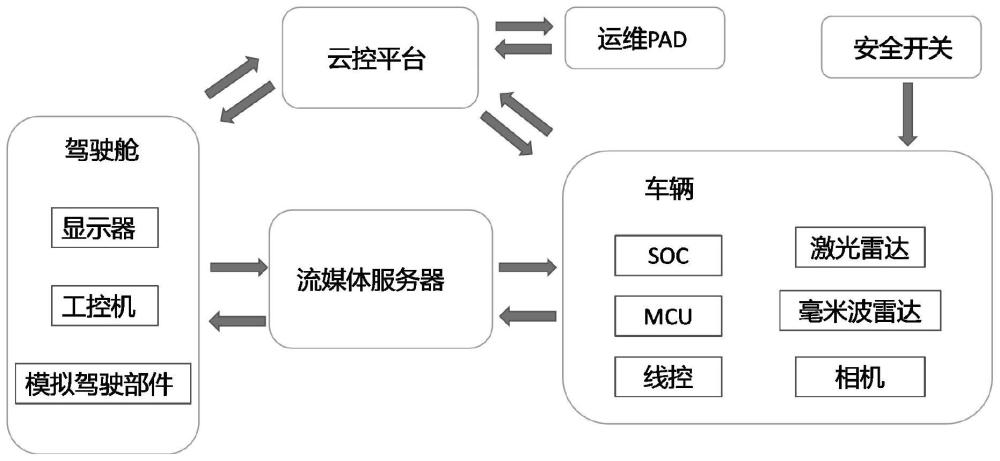
2、本发明提供如下技术方案:一种基于井下矿车远程驾驶舱多级安全冗余保障系统,包括无人驾驶矿车、云控平台、驾驶舱、流媒体服务器、运维pad和安全开关;
3、无人驾驶矿车包括soc+mcu的异构域控制器作为车辆控制单元,线控为车辆实际执行控制单元,以及分布在车辆前后左右的四路摄像头、视频推流控制器、无人驾驶车控单元、激光雷达与毫米波雷达、支持5g的cpe网络设备,可切换无人驾驶模式和遥控驾驶模式;
4、通过激光雷达与毫米波雷达感知设备和定位设备通过决策规划及控制算法的计算,车控单元向线控系统发送控制指令,同时对线控系统的状态数据进行接收,反馈给云控平台;
5、在遥控驾驶模式下,车辆控制单元通过控制视频推流控制器,向流媒体服务器推送视频数据,并且接收驾驶舱发送过来的控制指令,车辆控制单元作为无人驾驶车辆的大脑,通过云控平台指令和其运行的无人驾驶程序,来执行无人驾驶与遥控驾驶的状态切换;
6、驾驶舱包括显示器、工控机、模拟驾驶部件,通过操作方向盘、刹车油门部件,下发车辆的控制指令,其中模拟驾驶部件内还配备一个急停按钮,执行紧急停车操作;
7、流媒体服务器作为视频及信号传输中中介;可转发视频及控制信号,并对多个设备进行收流,遥控的同时,其他设备作为安全冗余进行监控,同时对多个舱和多个矿车进行匹配;
8、云控平台负责调度,对所有矿车的状态进行监测,可查看每一台矿车的实时状态,并对无人驾驶矿车下发控制指令及作业任务,同时通过算法调度车辆与驾驶舱进行匹配,下发遥控指令控制矿车切换到遥控驾驶模式;
9、运维pad作为移动操作端,运维pad通过无线网络与云控平台连接,获取每辆车的状态信息,通过运维pad上的界面操作,向云控平台发送对车辆的启动、停止、上报故障、发起指定车辆遥控驾驶申请操作;
10、安全开关同样也是现场运维或保障人员使用的安全设备,用于人为干预遥控系统作业,进行紧急停车。
11、优选的,在切换到遥控驾驶模式后,驾驶舱与车端通过流媒体服务器进行视频数据与控制指令交互,流媒体服务器专注于遥控驾驶模式下车端与舱端的数据交互,通过专用的5g通道,加快数据传输。
12、优选的,驾驶舱与无人驾驶矿车通过一对一的匹配方式连接,云控平台分别向匹配成功的车端与舱端下发遥控驾驶指令,驾驶舱在匹配车辆成功后,通过驾驶舱上的驾驶安全开关,选择是否下发车辆控制指令。
13、优选的,在专业驾驶人员不足或出现故障的情况下时,驾驶舱舱可禁止模拟驾驶控制器下发车辆控制指令,只进行收流监控车辆状态,在必要条件下启动急停,停止车辆工作;在开启驾驶安全开关条件下,对视频进行监控,并通过模拟驾驶控制器下发车辆控制指令,远程操控车辆。
14、与现有技术对比,本发明具备以下有益效果:
15、该基于井下矿车远程驾驶舱多级安全冗余保障系统,依托云控平台智能算法调度,实现多端发起,多车与多舱通过专用流媒体服务器在特定网络通道下交互,辅助配合运维pad、安全开关,及雷达aeb功能等多设备端的安全冗余配置,应对无人驾驶车辆复杂的故障场景,最大限度的保证安全,和续接作业任务,极大提高无人驾驶系统工作效率与容错率。
16、通过云控平台、驾驶舱、现场运维的多通道监控,在遥控车辆出现异常情况时,可以及时将车停下来,根据实际环境,快速的发起远程遥控接管,进行续接任务和驾驶到安全区停车。通过驾驶舱与多车智能匹配,提高系统工作效率,辅助车上多路感知传感器保障安全。
技术特征:1.一种基于井下矿车远程驾驶舱多级安全冗余保障系统,其特征在于,包括无人驾驶矿车、云控平台、驾驶舱、流媒体服务器、运维pad和安全开关;
2.根据权利要求1所述的一种基于井下矿车远程驾驶舱多级安全冗余保障系统,其特征在于:在切换到遥控驾驶模式后,驾驶舱与车端通过流媒体服务器进行视频数据与控制指令交互,流媒体服务器专注于遥控驾驶模式下车端与舱端的数据交互,通过专用的5g通道,加快数据传输。
3.根据权利要求1所述的一种基于井下矿车远程驾驶舱多级安全冗余保障系统,其特征在于:驾驶舱与无人驾驶矿车通过一对一的匹配方式连接,云控平台分别向匹配成功的车端与舱端下发遥控驾驶指令,驾驶舱在匹配车辆成功后,通过驾驶舱上的驾驶安全开关,选择是否下发车辆控制指令。
4.根据权利要求1所述的一种基于井下矿车远程驾驶舱多级安全冗余保障系统,其特征在于:在专业驾驶人员不足或出现故障的情况下时,驾驶舱舱可禁止模拟驾驶控制器下发车辆控制指令,只进行收流监控车辆状态,在必要条件下启动急停,停止车辆工作;在开启驾驶安全开关条件下,对视频进行监控,并通过模拟驾驶控制器下发车辆控制指令,远程操控车辆。
技术总结本发明涉及无人驾驶技术领域,且公开了一种基于井下矿车远程驾驶舱多级安全冗余保障系统,包括无人驾驶矿车、云控平台、驾驶舱、流媒体服务器、运维PAD和安全开关;无人驾驶矿车包括SOC+MCU的异构域控制器作为车辆控制单元,线控为车辆实际执行控制单元。该基于井下矿车远程驾驶舱多级安全冗余保障系统,依托云控平台智能算法调度,实现多端发起,多车与多舱通过专用流媒体服务器在特定网络通道下交互,辅助配合运维PAD、安全开关,及雷达AEB功能等多设备端的安全冗余配置,应对无人驾驶车辆复杂的故障场景,最大限度的保证安全,和续接作业任务,极大提高无人驾驶系统工作效率与容错率。技术研发人员:黄琰,冯冲,申永刚受保护的技术使用者:理工雷科智途(北京)科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200052.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表