一种矿用电铲回转机构的自动运行控制系统及方法与流程
- 国知局
- 2024-08-01 00:14:41
本发明涉及一种矿用电铲回转机构的自动运行控制系统及方法,属于矿用电铲控制。
背景技术:
1、矿用电铲是露天煤矿、铁矿和有色金属矿山开采系统的核心装备,承担着矿岩的“挖掘”和“装载”两大重要功能,其综合性能直接决定着整个矿山的开采效率和安全性,对国家资源开采和能源安全具有重要意义。矿用电铲体积巨大,斗容达几十立方米,高度达20米,自重超1000吨。其回转机构由于转动惯量大,为保护机械结构及回转稳定性,因此回转机构通常采用转矩矢量控制,即通过控制回转电机输出转矩改变回转机构的加速度,从而调节其角速度达到控制回转角度的目的。在实现电铲自动回转中需要考虑多种因素和分析动力学特性,属于非线性且不稳定的复杂系统。
2、现在的矿用电铲回转控制是驾驶员凭借其经验,根据回转的运行状态人为控制主令的方向和大小,然后将主令值输入到变频器,从而控制回转机构的加速、减速及停车。智能控制方法多数为速度控制,采用恒定速度的方法会导致出现较大误差及强烈振动;控制回转按某种特定速度曲线平稳运行的方法由于存在启动和停止的缓速运行阶段,会导致效率低及连续性差的缺陷。如果采用pid控制方法,会难以确定控制系数。
技术实现思路
1、发明目的:本发明的目的是至少解决一个现有技术中存在的问题,本发明一个方面是提供矿用电铲回转机构的自动运行控制方法,通过采用模糊控制的方法,控制矿用电铲回转机构精准运行到任意角度,实现智能化转矩控制。
2、技术方案:为实现上述目的,本发明采用的技术方案为:
3、一种矿用电铲回转机构的自动运行控制方法,包括以下步骤:
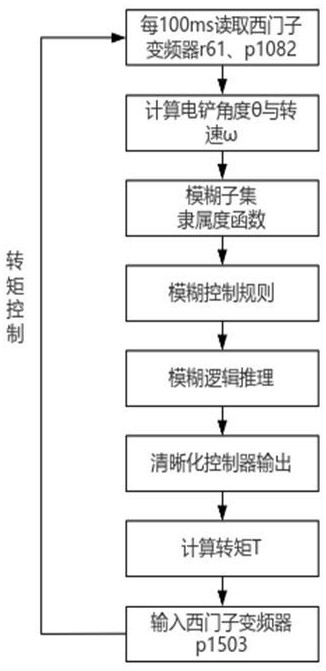
4、步骤1,检测回转机构的回转电机实际速度,根据回转电机实际速度确定回转角度θ与回转角速度ω。
5、步骤2,采用模糊控制器根据回转角度θ与回转角速度ω得到回转转矩t。回转角度θ与回转角速度ω作为模糊控制器的输入,模糊控制器的输出为回转转矩t。确定模糊控制器采用的模糊子集和模糊规则表。
6、步骤3,根据模糊规则表进行模糊逻辑推理,得到回转转矩的分布图。
7、步骤4,根据回转转矩的分布图进行回转转矩清晰化,得到清晰化回转转矩。
8、步骤5,根据清晰化回转转矩得到变频器输入转矩,对回转机构进行转矩控制。
9、优选的,回转角度θ的计算公式如下:
10、
11、其中,θ表示回转角度,αa表示铲斗初始位置对应回转角度,αb表示目标位置对应回转角度,t表示运动时间,r61表示回转电机实际速度,n表示回转电机与减速机的传动比。
12、优选的,模糊规则表建立的方法如下:
13、步骤21,当回转角度θ位于回转角度的零子集zeθ时,回转转矩t的大小取决于当前回转角速度ω的大小,方向与当前回转角速度ω相反。
14、步骤22,当回转角度θ位于回转角度的负小子集nsθ或回转角度的正小子集psθ,回转转矩t的大小和方向取决于当前回转角速度ω。
15、步骤23,当回转角度θ位于回转角度的负中子集nmθ、回转角度的负大子集nbθ、回转角度的正中子集pmθ或回转角度的正大子集pbθ。回转转矩t的选择取决于当前回转角速度ω的大小和方向,且当前回转角速度ω位于回转角速度的负中子集nmω、回转角速度的负大子集nbω、回转角速度的正中子集pmω或回转角速度的正大子集pbω时,回转转矩t的以回转角度θ大于π的方向运动。
16、优选的,所述模糊子集为{nbk,nmk,nsk,zek,psk,pmk,pbk},k表示对象,k指θ、ω或t,nbk表示对象k的负大子集,nmk表示对象k的负中子集,nsk表示对象k的负小子集,zek表示对象k的零子集,psk表示对象k的正小子集,pmk表示对象k的正中子集,pbk表示对象k的正大子集。
17、优选的,模糊逻辑推理方法如下:
18、步骤31,确定回转角度、回转角速度在各模糊子集中的隶属度。
19、步骤32,从模糊规则表中找出回转角度、回转角速度对应的控制规则。
20、步骤33,计算被激活的控制规则的蕴含关系及输出。
21、步骤34,将所有的输出取并集就得到了总输出的回转转矩t的分布图。
22、优选的,所述输入转矩的计算公式如下:
23、
24、其中,p1503表示输入转矩,t*表示清晰化回转转矩。
25、优选的,隶属度函数采用三角形函数。
26、本发明的另一个目的,是提供一种矿用电铲回转机构的自动运行控制系统,包括回转角度检测单元、回转角速度确定单元、模糊控制器、清晰化控制器以及输出单元,其中:
27、所述回转角度检测单用于检测回转机构的回转角度θ。
28、所述回转角速度确定单元确定回转角速度ω。
29、所述模糊控制器用于输入回转角度θ和回转角速度ω,然后根据模糊规则表进行模糊逻辑推理得到回转转矩的分布图。
30、所述清晰化控制器用于根据回转转矩的分布图进行回转转矩清晰化,得到清晰化回转转矩。
31、所述输出单元用于输出清晰化回转转矩。
32、优选的,回转角度θ的计算公式如下:
33、
34、其中,θ表示回转角度,αa表示铲斗初始位置对应回转角度,αb表示目标位置对应回转角度,t表示运动时间,r61表示回转电机实际速度,n表示回转电机与减速机的传动比。
35、优选的,还包括输入转矩控制器,所述输入转矩控制器根据清晰化回转转矩得到变频器输入转矩,对回转机构进行转矩控制,所述输入转矩的计算公式如下:
36、
37、其中,p1503表示输入转矩,t*表示清晰化回转转矩。
38、本发明相比现有技术,具有以下有益效果:
39、通过采用模糊控制的基本思想和理论,将传统基于数学机理模型控制的方法转变为基于数据和人工经验驱动的智能方法,利用模糊控制法则来描述系统变量间的关系,使矿用电铲能够自动快速平稳精准地回转到任意指定角度。当矿用电铲当前位置距离目标回转角度较远时,使其自动加速运行。运动过程中,会按照当前的角度与速度实时调整控制转矩。当位于目标点附近时,减速并进行自适应精准停车。
技术特征:1.一种矿用电铲回转机构的自动运行控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述矿用电铲回转机构的自动运行控制方法,其特征在于,回转角度θ的计算公式如下:
3.根据权利要求2所述矿用电铲回转机构的自动运行控制方法,其特征在于:模糊规则表建立的方法如下:
4.根据权利要求3所述矿用电铲回转机构的自动运行控制方法,其特征在于:所述模糊子集为{nbk,nmk,nsk,zek,psk,pmk,pbk},k表示对象,k指θ、ω或t,nbk表示对象k的负大子集,nmk表示对象k的负中子集,nsk表示对象k的负小子集,zek表示对象k的零子集,psk表示对象k的正小子集,pmk表示对象k的正中子集,pbk表示对象k的正大子集。
5.根据权利要求4所述矿用电铲回转机构的自动运行控制方法,其特征在于:模糊逻辑推理方法如下:
6.根据权利要求5所述矿用电铲回转机构的自动运行控制方法,其特征在于:所述输入转矩的计算公式如下:
7.根据权利要求6所述矿用电铲回转机构的自动运行控制方法,其特征在于:隶属度函数采用三角形函数。
8.一种矿用电铲回转机构的自动运行控制系统,其特征在于,包括回转角度检测单元、回转角速度确定单元、模糊控制器、清晰化控制器以及输出单元,其中:
9.根据权利要求8所述矿用电铲回转机构的自动运行控制系统,其特征在于,回转角度θ的计算公式如下:
10.根据权利要求8所述矿用电铲回转机构的自动运行控制系统,其特征在于,还包括输入转矩控制器,所述输入转矩控制器根据清晰化回转转矩得到变频器输入转矩,对回转机构进行转矩控制,输入转矩的计算公式如下:
技术总结本发明公开了一种矿用电铲回转机构的自动运行控制系统及方法,包括回转角度检测单元、回转角速度确定单元、模糊控制器、清晰化控制器以及输出单元,首先检测回转机构的回转电机实际速度,根据回转电机实际速度确定回转角度与回转角速度,然后选择模糊控制器,同时确定模糊控制器采用的模糊子集和模糊规则表,模糊控制器根据回转角度与回转角速通过模糊规则表进行模糊逻辑推理,得到回转转矩的分布图,其次进行回转转矩清晰化,最后根据清晰化回转转矩得到变频器输入转矩,对回转机构进行转矩控制。本发明通过采用模糊控制的方法,控制矿用电铲回转机构精准运行到任意角度,实现智能化转矩控制。技术研发人员:张柏荣,岳海峰,职彦,郭云飞,王勇澎,张震男,李光,石磊,武牡丹,赵文玉,李天昱,卫涛,宋永泉受保护的技术使用者:山西太重智能采矿装备技术有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200204.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表