用于水下重型液压打捞夹具的多功能控制装置及控制方法与流程
- 国知局
- 2024-08-01 00:14:38
本发明涉及水下打捞及水下电子舱领域,特别是一种用于水下重型液压打捞夹具的多功能控制装置及控制方法,同时该电子舱也可应用于其他作业级、观察级水下机器人。
背景技术:
1、水下打捞机器人通常搭载推进器、机械手、传感器、液压系统等多种设备,用于实现装置运动、机械手打捞等控制任务,电子舱是用于管理水下设备的装置,起“控制大脑”的作用。
2、经过查阅“一种作业型水下机器人电子舱(201710749667.5)”包括耐压壳体和内部控制电路,用于实现水下机器人的电机驱动,但该电子舱缺乏对电子舱内部状态监测,同时缺乏对作业工具的控制接口,应用性差。“一种水下机器人电子舱(201810818568.2)”和“一种水冷散热式耐压电子舱(201621262822.8)”着重考虑电子舱散热和水密耐压,缺乏针对水下机器人作业时其他功能的扩展。“一种具有自动报警功能的水下电子舱(201821989502.1)”和“一种海洋牧场水下视频监控与水质监测用水下电子舱(201721302560.8)”主要通过检测电子舱内部漏水状况进行报警监测,但仅考虑了漏水问题,忽视了其他状态的检测。“轴径向混合安装的水下机器人电子舱结构(201911091858.2)”和“一种水下电子舱体机械结构(201910303959.5)”主要针对电子舱整体结构进行设计,对电子元件细节布局问题考虑欠缺。
3、综上所述,现有电子舱着重关注对电子舱水密耐压、散热问题的设计,但存在功能单一、舱内信息不完善、局部结构布局忽视电子元件自身散热等特性的缺陷,并且电子舱仅针对特定应用设计,扩展性不强。因此,亟需研制一种功能全面、舱体结构布局合理的控制电子舱用于水下打捞rov中。
技术实现思路
1、本发明针对现有技术存在的上述不足进行了改进和创新,其目的在于提供一种用于水下重型液压打捞夹具的多功能控制装置及控制方法。
2、为了完成本技术的发明目的,本技术采用以下技术方案:
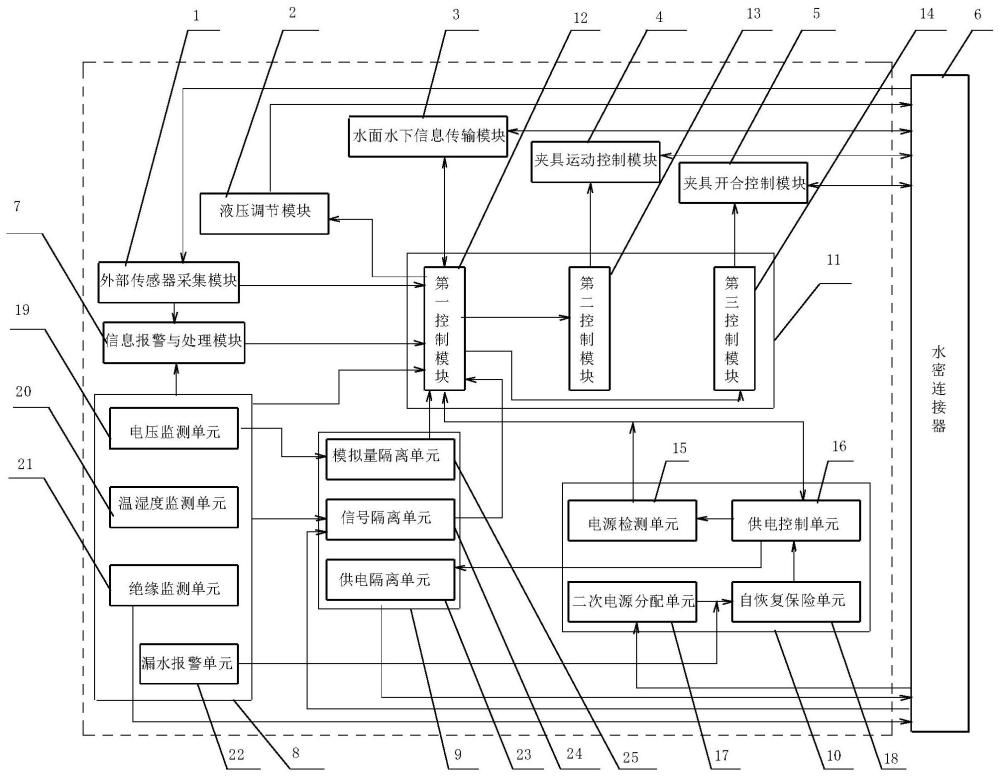
3、本发明的一种用于水下重型液压打捞夹具的多功能控制装置,控制装置布置在水密耐压舱内部,通过水密耐压舱上的水密连接器控制液压打捞夹具,它包括:外部传感器采集模块、液压调节模块、水面水下信息传输模块、夹具运动控制模块、夹具开合控制模块、信息报警与处理模块、舱内状态监测模块、故障隔离模块、智能电源控制模块和中央控制模块;水面水下信息传输模块输出端通过水密连接器与水面作业系统双向连接,实现水面与水下系统之间的数据交互,液压调节模块的输出端与水密连接器的输入端相连,外部传感器采集模块的输入端和输出端分别与水密连接器输出端和信息报警与处理模块输入端相连,中央控制模块包括:第一控制模块、第二控制模块和第三控制模块,水面水下信息传输模块、夹具运动控制模块和夹具开合控制模块的输入端分别与第一控制模块、第二控制模块和第三控制模块的输出端相连;
4、其中:
5、所述第一控制模块分别与智能电源控制模块、外部传感器采集模块、舱内状态监测模块和信息报警与处理模块相连,舱内状态监测模块的输出端与信息报警与处理模块输入端相连,第一控制模块通过水面水下信息传输模块获取和执行水面发送的开关指令,并通过它实时上传打捞夹具状态和舱内报警数据;所述第一控制模块的输出端还与液压调节模块的输入端相连,实现液压打捞夹具的液压系统的压力调节;
6、所述第二控制模块分别与第一控制模块和夹具运动控制模块相连,用于获取水面水下信息传输模块发送的夹具运动控制指令和第一控制模块发送的外部传感器采集模块采集的航向、姿态、位置和转速数据,经过推力配平、推力分配和pid控制算法,指导生成相应的运动控制量,将其发送给夹具运动控制模块;
7、所述第三控制模块分别与夹具开合控制模块和第一控制模块相连,用于获取水面水下信息传输模块发送的夹具控制指令和目标开合点,及第一控制模块发送的外部传感器采集模块采集的夹具开合行程数据,经过pid控制算法,控制夹具自动开合至设定的目标点,并将控制量发送至与之连接的夹具开合控制模块;
8、所述智能电源控制模块包括:二次电源分配单元、自恢复保险单元、供电控制单元和电源检测单元;二次电源分配单元、自恢复保险单元、供电控制单元和电源检测单元依次相连,二次电源分配单元的输入端与水密连接器连接,将输入电压转换至所需的输出电压,输出电压分配至自恢复保险单元,自恢复保险单元由不同电流的保险丝组成,供电控制单元与第一控制模块(12)双向相连,电源检测单元的输出端与第一控制模块的输入端相连,供电控制单元根据第一控制模块发送给的开关指令完成外部设备供电开关控制;电源检测单元将检测到的外部设备每一路电压数据传输至第一控制模块,判断电源供电是否正常;
9、所述舱内状态监测模块包括:电压监测单元、温湿度监测单元、绝缘监测单元和漏水报警单元,第一控制模块通过信息报警与处理模块实时读取舱内状态监测模块监测到的电压、温湿度、绝缘和漏水数据,监测其水密耐压舱内部状态;
10、所述故障隔离模块包括:供电隔离单元、信号隔离单元和模拟量隔离单元,信号隔离单元输入端分别与水密连接器和舱内状态监测模块相连,信号隔离单元输出端与第一控制模块连接,供电隔离单元输入端与输出端分别与供电控制单元和水密连接器连接,电压监测单元、模拟量隔离单元与第一控制模块依次相连,当外部设备或舱内电子器件发生故障时,通过供电隔离单元、信号隔离单元和模拟量隔离单元实现与中央控制模块之间完全隔离,保证了中央控制模块稳定运行,使得打捞夹具安全作用作业;
11、所述信息报警与处理模块输入端分别与舱内状态监测模块和外部传感器采集模块连接,对舱内和外部传感器数据进行故障阈值判断并将报警信息输出至第一控制模块,第一控制模块进行本地存储并将其上传至水面。
12、本发明的用于水下重型液压打捞夹具的多功能控制装置,其中:所述水面水下信息传输模块与第一控制模块双向相连。
13、本发明的用于水下重型液压打捞夹具的多功能控制装置,其中:所述漏水报警单元的漏水检测线安置于水密耐压舱亲水端,使其能快速响应漏水。
14、本发明的用于水下重型液压打捞夹具的多功能控制装置,其中:所述漏水报警单元和绝缘监测单元上还配置常闭继电器,上述漏水报警单元的常闭继电器与二次电源分配单元输出端相连,所述绝缘监测单元的常闭继电器与所监测的外部设备的水密连接器相连,当漏水和绝缘发生报警时,漏水报警单元的常闭继电器和绝缘监测单元的常闭继电器由常闭变为常开,断开二次电源分配单元输出端及所监测的外部设备,防止控制装置损坏。
15、本发明的一种水下重型液压打捞夹具多功能控制装置,其中:所述第一控制模块为ni 9036控制器和ni 9871或ni 9201接口模块,所述ni 9036控制器用于完成数据通信和存储功能,ni 9871为rs485/rs422接口,用于与舱内设备和外部传感器的数据传输,ni9201与电压监测单元连接,用于采集电压模拟量;第二控制模块和第三控制模块为fpga高速处理器。
16、用本发明的水下重型液压打捞夹具多功能控制装置来控制水下重型液压打捞夹具的方法,其中:它包括以下步骤:
17、步骤s1、水面水下信息传输模块完成水面作业系统与中央控制模块的通信连接;
18、步骤s2、智能电源控制模块接收中央控制模块的开关控制指令,依次对外接设备上电,并对每一路电压进行检测,判断电压控制是否正常;
19、步骤s3、舱内状态监测模块读取舱内的温度、湿度、电压、漏水和绝缘数据,信息报警与处理模块监测上述数据是否正常,当漏水和绝缘发生时,进行报警,并且漏水报警单元的常闭继电器和绝缘监测单元的常闭继电器由常闭变为常开,断开二次电源分配单元输出端和绝缘监测点设备,防止控制装置损坏;
20、步骤s4、第一控制模块实时读取外部传感器采集模块采集到液压打捞夹具的液压系统的压力、温度、油量数据及夹具搭载的传感器数据,信息报警与处理模块监测其是否正常;
21、步骤s5、第一控制模块根据水面水下信息传输模块发送的压力调节命令,指导生成调节控制量,并通过液压调节模块和水密连接器将其发送至泵控阀舱;
22、步骤s5、第二控制模块根据水面水下信息传输模块发送的运动控制命令,指导完成前进、后退、左移、右移、左转和右转运动量计算,并通过夹具运动控制模块和水密连接器将其发送至推进器控制阀舱;
23、步骤s6、第二控制模块根据水面水下信息传输模块发送的自动控制命令、姿态、位置和航向数据,指导完成定向和定位自动控制量计算,并通过夹具运动控制模块和水密连接器将其发送至推进器控制阀舱;
24、步骤s7、第三控制模块根据水面水下信息传输模块发送的打捞夹具开合控制命令,指导完成夹具的开合控制量计算,并通过夹具开合控制模块和水密连接器发送至夹具控制阀舱;
25、步骤s8、第一控制模块将舱内状态监测模块和外部传感器采集模块读取的数据通过水面水下信息传输模块和水密连接器定时上传至水面,以图形化方式进行可视化显示;
26、步骤s9、当设备发生故障时,故障隔离模块将设备的信号、模拟量和电压与中央控制模块完全隔离,保障中央控制模块仍能正常运行,使打捞夹具安全回收。
27、本发明的方法,其中:所述绝缘监测点设备包括:至少8路水下外部搭载设备。本发明的方法,其中:所述8路水下外部搭载设备包括:1路推进器控制阀舱、1路夹具控制阀舱、1路泵控阀舱、1路水下电机监测舱、1路补偿器监测舱、1路油箱监测舱、1路声呐和1路惯导/高度计/深度计。
28、与现有方法相比,本发明用于水下重型液压打捞夹具的多功能控制装置的有益效果为:
29、(1)、内部监测信息全面
30、该电子舱控制装置的舱内状态监测模块,实时采集温湿度、漏水、电源、绝缘等多类数据,保障了电子舱水下工作的安全性。
31、(2)供电可靠性强
32、该电子舱控制装置的电源控制及检测模块,通过监测其电压来判断供电是否正常,解决了传统仅通过继电器开关通断判断供电的方式,提高了电子舱水下供电的可靠性。
33、(3)低压绝缘监测能力
34、通常打捞rov仅监测高压(如:500v、3000v)绝缘,该电子舱在其内部配备24v、220v低压绝缘监测器,对水下重要的多路低压设备进行监测,进一步提高水下作业的安全性。
35、(4)接口丰富、可扩展性强
36、该电子舱除了应用在液压驱动的打捞rov上外,还可以应用在作业级、观察级rov中,并且该电子舱预留多个通信、供电接口,可以方便扩展外接模块或传感器,可快速实现其他功能。
37、(5)自动报警功能
38、该电子舱控制装置内部的控制器具备多维度数据采集和分析能力,并通过报警模块实时监测打捞rov整个系统运行状态。
39、(6)故障隔离功能
40、当所有水下打捞机器人搭载外部设备故障时可以与电子舱内部主系统隔离,保障了电子舱内部主系统的安全运行。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200201.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表