一种基于Airthoid曲线的刀具路径拐角光顺方法
- 国知局
- 2024-08-01 00:15:19
本发明涉及运动规划,具体涉及一种基于airthoid曲线的刀具路径拐角光顺方法。
背景技术:
1、复杂空间曲面通常采用nurbs曲线形式生成三维设计文件。但是大部分数控系统难以对参数曲线直接插补,在数控加工中广泛使用连续直线段描述刀具轨迹。然而,相邻直线段的几何不连续性必然导致进给速度和加速度波动过大,从而降低加工质量。现有光顺方法常用在拐角内接一段参数曲线的方法实现路径光顺连接,虽实现了速度方向和曲率的连续,但效果不如外接光顺曲线的方法显著。
2、文献1:“atmosudiro a ,verl a ,lechler a , et al. evaluation ofclothoids in manufacturing context [j]. procedia cirp, 2017, 62 541-546.”公开了一种c2连续的局部光顺方法,该方法对拐角处插入基于弧长参数的clothoid曲线实现了加工轨迹的光滑过渡,光顺曲线弧长可以解析计算,但是使用的是内接光顺曲线的方法。
3、文献2:“xu f ,sun y . a circumscribed corner rounding method based ondouble cubic b-splines for a five-axis linear tool path [j]. theinternational journal of advanced manufacturing technology, 2018, 94 (1-4):451-462.”公开了一种g2连续的局部光顺方法,该方法对直线段构成的拐角采用三次b样条曲线进行光顺,虽然是外接曲线生成的光顺路径,但是无法解析表达近似误差。
4、文献3:“he s ,yan c ,deng y , et al. a tolerance constrained g 2continuous path smoothing and interpolation method for industrial scararobots [j]. robotics and computer-integrated manufacturing, 2020, 63 101907-101907.”公开了一种g2连续的局部光顺方法,该方法对直线段构成的拐角采用三次b样条曲线进行光顺,虽然是外接曲线生成的光顺路径,但是基于几何迭代的方法生成路径,无法解析表达光顺曲线。
5、以上文献的典型特点是:光顺曲线虽然能够实现连续小线段构成的加工路径的光顺过渡,但是文献光顺方法无法同时具有近似误差可控、弧长解析计算和使用外接光顺曲线法。弧长迭代计算延长了前瞻过程的时间,限制了光顺算法的在线应用,内接光顺曲线法降低曲率极值的效果不够明显。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于airthoid曲线的刀具路径拐角光顺方法。
2、为解决上述技术问题,本发明采用如下技术方案:
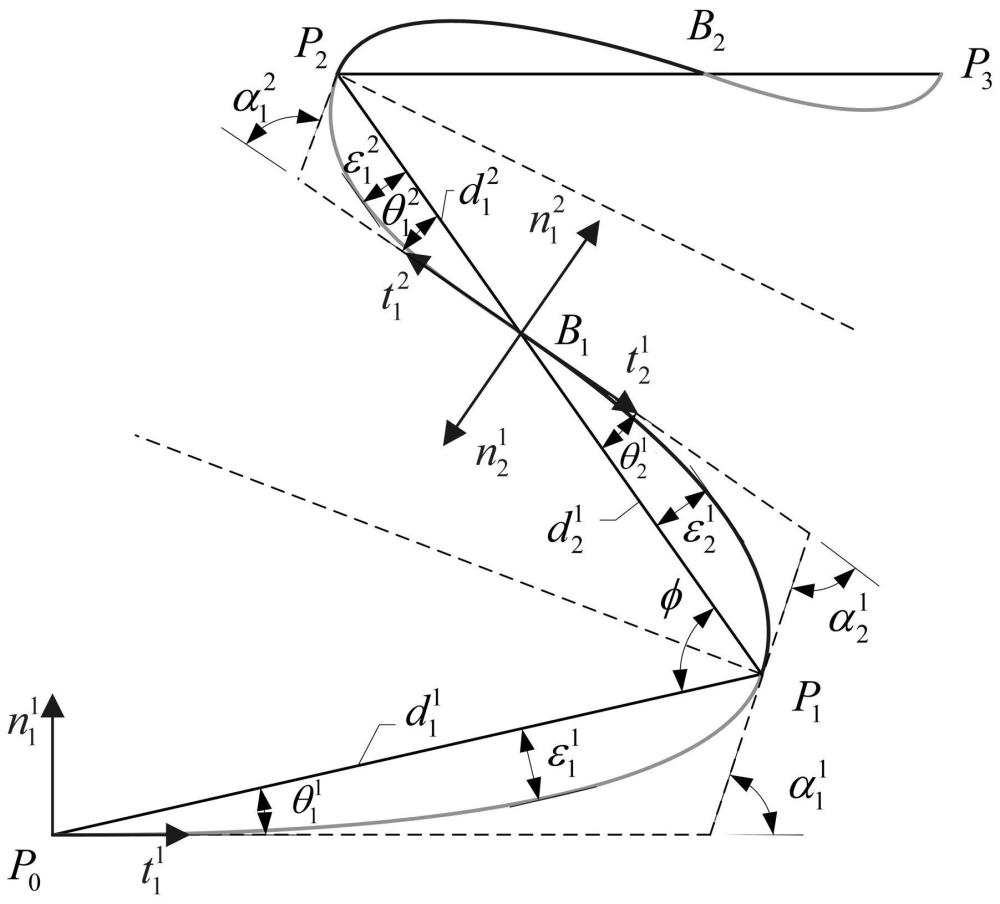
3、一种基于airthoid曲线的刀具路径拐角光顺方法,用于对具有多个拐角的刀具路径进行光顺,得到光顺曲线;光顺曲线定义如下:在每个拐角外接一对非对称的airthoid曲线,且任意两个相邻的airthoid曲线连接在一起,形成光顺曲线;任意一个拐角由直线段和直线段构成,;拐角外接的两条airthoid曲线中,靠近直线段称为第一airthoid曲线,另一条airthoid曲线称为第二airthoid曲线;光顺曲线与直线段存在交点;在点处构建坐标系,单位向量与直线段的夹角为第一airthoid曲线的坐标系偏转角,单位向量指向拐角内侧;在直线段上的点处建立坐标系,其中单位向量与直线段的夹角为第二airthoid曲线的坐标系偏转角,单位向量指向拐角内侧;再在点处建立坐标系,单位向量、分别与、方向相反,与直线段的夹角为拐角的第一airthoid曲线的坐标系偏转角,等于;拐角的第一airthoid曲线上的最大的轮廓误差,记为近似误差,发生在与直线段的平行线的相切点处;第二airthoid曲线上的最大的轮廓误差,记为近似误差,发生在与直线段的平行线的相切点处;光顺曲线在点处的切线与拐角的角平分线垂直;刀具路径拐角光顺方法具体包括以下步骤:
4、步骤一,根据给定的拐角的第一airthoid曲线的近似误差,计算的坐标系偏转角,确定;设置i=1;
5、步骤二,根据连续性条件确定拐角的第一airthoid曲线投影在直线段上的长度和第二airthoid曲线投影在直线段上的长度之间应满足的关系;
6、步骤三,根据所述连续性条件和近似误差约束方程获取的坐标系偏转角以及长度;
7、步骤四,根据坐标系偏转角和长度,确定第二airthoid曲线;
8、步骤五,根据确定的第一airthoid曲线和确定的第二airthoid曲线,解析计算和的弧长和曲率极值;
9、步骤六,i=i+1,重复运行步骤二至步骤五,直至确定所有拐角外接的airthoid曲线,并对所有拐角外接的airthoid曲线的弧长和曲率极值进行解析。
10、进一步地,所述根据给定的拐角的第一airthoid曲线的近似误差,计算的坐标系偏转角,确定,具体包括:
11、式一:;
12、其中,为拐角的第一airthoid曲线投影在直线段上的长度,即直线段本身的长度;为拐角的角度;、为中间变量:
13、;
14、;
15、通过牛顿迭代法对式一进行求解,得到第一airthoid曲线的坐标系偏转角,完成拐角的第一airthoid曲线的确定。
16、进一步地,所述根据连续性条件确定拐角的第一airthoid曲线投影在直线段上的长度和第二airthoid曲线投影在直线段上的长度之间应满足的关系,具体包括:
17、所述连续性条件为:
18、;
19、其中,分别为光顺曲线在点处的切线分别与单位向量形成的夹角;为拐角的角度;
20、、、、为中间变量:
21、;
22、;
23、;
24、。
25、进一步地,步骤三具体包括:
26、基于已知的、,通过连续性条件得到关于的表达式,将代入近似误差约束方程,得到一个关于的不等式组,进而求出的取值范围;为使拐角处光顺曲线的曲率最小,在的取值范围内取最大值,作为最终的坐标系偏转角;将代入关于的表达式,得到;
27、所述近似误差约束方程为:
28、;
29、;
30、表示直线段的长度,为光顺曲线在点处的切线与单位向量形成的夹角,、、均为中间变量:
31、;
32、;
33、。
34、进一步地,所述根据坐标系偏转角和长度,确定第二airthoid曲线,具体包括:
35、和确定后,拐角外接的两条airthoid曲线、唯一确定,、对应的特征参数和分别为:
36、;;
37、、为中间变量:
38、;
39、;
40、特征参数和分别用于表示、曲率变化的缓急程度。
41、进一步地,所述根据确定的第一airthoid曲线和确定的第二airthoid曲线,解析计算和的弧长和曲率极值,具体包括:
42、第一airthoid曲线和第二airthoid曲线的曲率极值,发生在和的连接点,即点处:
43、;
44、和对应的弧长和分别为:
45、;;
46、、为中间变量:
47、;
48、。
49、与现有技术相比,本发明的有益技术效果是:
50、本发明基于airthoid曲线进行加工路径的光顺,实现了运动速度平顺,具有光顺曲线基于弧长参数表达、c3连续、轮廓误差可控、曲率极值和弧长解析表达的优点。本发明降低了拐角处的曲率极值,提高加工效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200275.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。