一种融合D*算法和人工势场法的轮式机器人路径规划方法
- 国知局
- 2024-08-01 00:15:05
本发明涉及机器人路径规划,尤其涉及一种融合d*算法和人工势场法的轮式机器人路径规划方法。
背景技术:
1、随着轮式机器人领域的发展,路径规划方面的算法优化比比皆是,这些算法按照划分层面的不同分为两类:全局路径规划算法和局部路径规划算法。全局路径规划是指在充分感知收集轮式机器人周围环境的情况下,为轮式机器人规划出一条从起点到目标点的可行的最优路径;局部路径规划是指轮式机器人在行进过程中,通过实时的感知收集其周围障碍物的信息,而后规划出一条能够使轮式机器人到达目标点的相对最优路线。
2、人工势场法是khatib在1986年提出的一种局部路径规划算法,它是将轮式机器人所在的周围环境抽象为一个人工势力场。其中,目标点对轮式机器人产生的是“引力”,轮式机器人行进过程中的障碍物对轮式机器人产生的是“斥力”。最后,通过控制目标点的引力和障碍物的斥力来规划设计出一条能够使轮式机器人到达目标点的可行的相对的最优路线。尽管人工势场法具有原理简单、响应速度快、计算时间短的优点,但是它存在目标不可达和局部最小点问题。此外,一般进行轮式机器人的路径规划时,假设轮式机器人所处的环境是无界的,这与实际情况不符。
技术实现思路
1、本发明的目的是提供一种融合d*算法和人工势场法的轮式机器人路径规划方法,将d*算法与人工势场法进行融合,极大地减少路径重复,进而缩短算法的计算时间,能够使得轮式机器人顺利到达目标点。
2、为了实现上述目的,本发明所采用的技术方案是:一种融合d*算法和人工势场法的轮式机器人路径规划方法,包括如下步骤:
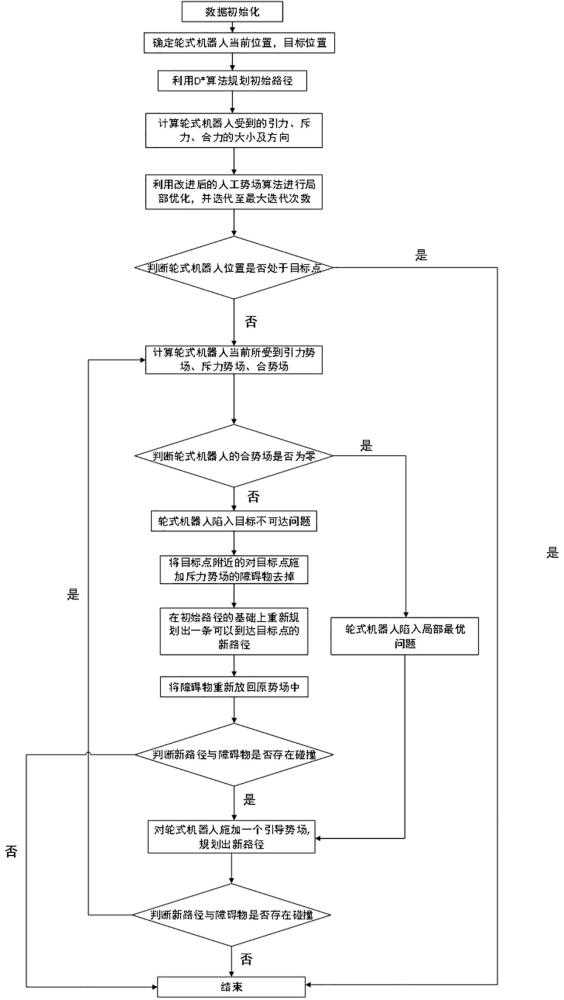
3、步骤a:数据初始化,确定轮式机器人当前所处位置、目标位置以及动态障碍物和静态障碍物位置;
4、步骤b:利用d*算法进行全局路径规划,得到一条初始路径,并将初始路径中的拐点设置为子目标点;
5、步骤c:将障碍物及轮式机器人所处环境的边界设置为斥力级,将子目标点和目标点设置为引力级,并且将目标点设置为轮式机器人所处环境中的势能最小点;
6、步骤d:计算轮式机器人受到的引力、斥力、合力的大小与方向,利用人工势场法进行局部避障,若轮式机器人此后可以顺利到达目标点,则算法结束,否则进行步骤e;
7、步骤e:计算轮式机器人当前所受的引力势场、斥力势场、合势场;
8、步骤f:若合势场不为零,则判断轮式机器人陷入目标不可达,进行目标不可达解决子程序;若合势场为零,则判断轮式机器人陷入局部最优,进行局部最优解决子程序。
9、优选的,所述步骤a中还建立了轮式机器人所处环境道路边界域势场,具体如下式所示:
10、
11、
12、
13、式中,urepc表示道路中心斥力势场,urepl表示道路左边界危险斥力势场,urepr表示道路右边界危险斥力势场,krepc表示中心斥力增益系数,krepl表示道路左边界斥力增益系数,krepr表示道路右边界斥力增益系数,表示轮式机器人质心到车辆所在车道中心轴线的法向距离,表示轮式机器人质心到道路左边界的法向距离,表示轮式机器人质心到道路右边界的法向距离,d表示轮式机器人横向宽度。
14、优选的,所述步骤b中d*算法的启发函数为:
15、
16、式中,启发函数h(s)表示由当前节点s到点sstart的预估代价;当前节点s的坐标为(xs,ys),起点sstart的坐标为(xstart,ystart);
17、路径代价函数为:
18、
19、
20、式中,succ(s)为节点s的后记节点s′的集合;c(s,s′)为由节点s′(xs′,ys′)到s(xs,ys)的移动代价。
21、优选的,所述步骤c中目标点产生的引力势场为uatt,
22、式中,katt表示引力增益系数,y表示轮式机器人所处位置坐标,yg表示目标点位置坐标;
23、障碍物对轮式机器人产生的斥力势场为urep,
24、
25、式中,r0表示轮式机器人的安全区域的半径,r表示障碍物与轮式机器人的距离,krep表示斥力增益系数,ρ0表示障碍物势场的影响范围,ρ表示轮式机器人与障碍物之间的欧几里得距离。
26、优选的,所述步骤d中轮式机器人受到合力f为引力函数fatt与斥力函数frep矢量叠加之和,具体公式为:
27、
28、fatt=-grad[uatt(y)]=-katt(y-yg)
29、
30、式中,n为存在于行驶环境中的障碍物数量。
31、优选的,所述步骤f中目标不可达解决子程序具体为将目标点附近的给予目标点斥力势场的障碍物去掉,在初始路径的基础上重新规划出一条可以到达目标点的新路径,之后将障碍物重新放回原势场中,之后判断规划出的新路径与障碍物是否存在碰撞,若无碰撞,则算法结束;若存在碰撞,给轮式机器人施加一个引导势场,规划出新路径。
32、优选的,所述步骤f中局部最优解决子程序具体为对轮式机器人给予一个引导势场,使轮式机器人跳出局部最优点,此后判断后面的路径与障碍物是否存在碰撞,若发生碰撞,则跳回步骤e。
33、本发明的有益效果是:
34、本轮式机器人路径规划方法对传统人工势场法进行了改进,在斥力势场函数中引入了斥力势场优化系数,并加入了道路边界域势场和引导势场。这些改进使得轮式机器人可以有效减少目标不可达和局部最优的可能性。当机器人沿着预定路径走到某一点时,若遇到了障碍物挡住了下一个应该走的点,a*算法会重新更新障碍物信息并重新运行来找到新路径d*算法,会导致很大程度上的路径重复;而d*算法结合人工势场算法会进行绕开障碍物,从而极大地减少路径重复,进而缩短算法的计算时间。即使遇到这些问题,也可以通过引导势场的施加,使轮式机器人顺利到达目标点。克服传统的人工势场法所存在的目标不可达和局部最小点问题等缺点。
技术特征:1.一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:包括如下步骤:步骤a:数据初始化,确定轮式机器人当前所处位置、目标位置以及动态障碍物和静态障碍物位置;
2.根据权利要求1所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤a中还建立了轮式机器人所处环境道路边界域势场,具体如下式所示:
3.根据权利要求1所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤b中d*算法的启发函数为:
4.根据权利要求1所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤c中目标点产生的引力势场为uatt,
5.根据权利要求4所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤d中轮式机器人受到合力f为引力函数fatt与斥力函数frep矢量叠加之和,具体公式为:
6.根据权利要求1所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤f中目标不可达解决子程序具体为将目标点附近的给予目标点斥力势场的障碍物去掉,在初始路径的基础上重新规划出一条可以到达目标点的新路径,之后将障碍物重新放回原势场中,之后判断规划出的新路径与障碍物是否存在碰撞,若无碰撞,则算法结束;若存在碰撞,给轮式机器人施加一个引导势场,规划出新路径。
7.根据权利要求1所述的一种融合d*算法和人工势场法的轮式机器人路径规划方法,其特征在于:所述步骤f中局部最优解决子程序具体为对轮式机器人给予一个引导势场,使轮式机器人跳出局部最优点,此后判断后面的路径与障碍物是否存在碰撞,若发生碰撞,则跳回步骤e。
技术总结本发明的目的是提供一种融合D*算法和人工势场法的轮式机器人路径规划方法,对传统人工势场法进行了改进,在斥力势场函数中引入了斥力势场优化系数,并加入了道路边界域势场和引导势场。这些改进使得轮式机器人可以有效减少目标不可达和局部最优的可能性。当机器人沿着预定路径走到某一点时,若遇到了障碍物挡住了下一个应该走的点,A*算法会重新更新障碍物信息并重新运行来找到新路径D*算法,会导致很大程度上的路径重复;而D*算法结合人工势场算法会进行绕开障碍物,从而极大地减少路径重复,进而缩短算法的计算时间。克服传统的人工势场法所存在的目标不可达和局部最小点问题等缺点。技术研发人员:郭志军,杜林林,王丁健,王远,李留西受保护的技术使用者:河南科技大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表