一种基于双车联动的协同调度方法与流程
- 国知局
- 2024-08-01 00:17:16
本发明涉及防撞,特别是涉及一种基于双车联动的协同调度方法。
背景技术:
1、炼钢现场各个跨区、库房各个区域大都是多台天车运行在同一轨道上,多台天车在同一轨道进行作业时,会面临相邻天车作业之间的协同调度问题。不合理的调度会引起多车相互等待而降低运行效率、触发天车控制层和硬件层防撞保护而异常停车等问题,不仅严重影响了正常的作业生产,而且存在很大的安全隐患问题。例如现有技术中,如图2所示,废钢跨与渣跨作业中,两侧分布不同的库区,放着对应的物料,同跨天车同一方向方向上不能越过另一台天车,天车移动至对应库区后,完成吸料动作后,移动至中间轨道槽车处,进行放料动作。此现有技术中天车在同一个跨区进行作业时,会面临相邻天车作业之间的协同调度问题。
2、申请公布号为cn109409603a的中国发明专利《一种应用于多行车的调度算法》公开一种根据天车数量将作业区域划分为与天车数量相同的区域,通过分区避免天车路径冲突的方法。然而,该方法未能真正实现双天车协同调度,也无法适应变动性。
技术实现思路
1、针对上述存在的技术问题,本发明提供了一种基于双车联动的协同调度方法及系统。
2、本发明采用以下具体的技术方案:
3、一种基于双车联动的协同调度方法,其方法包括以下步骤:
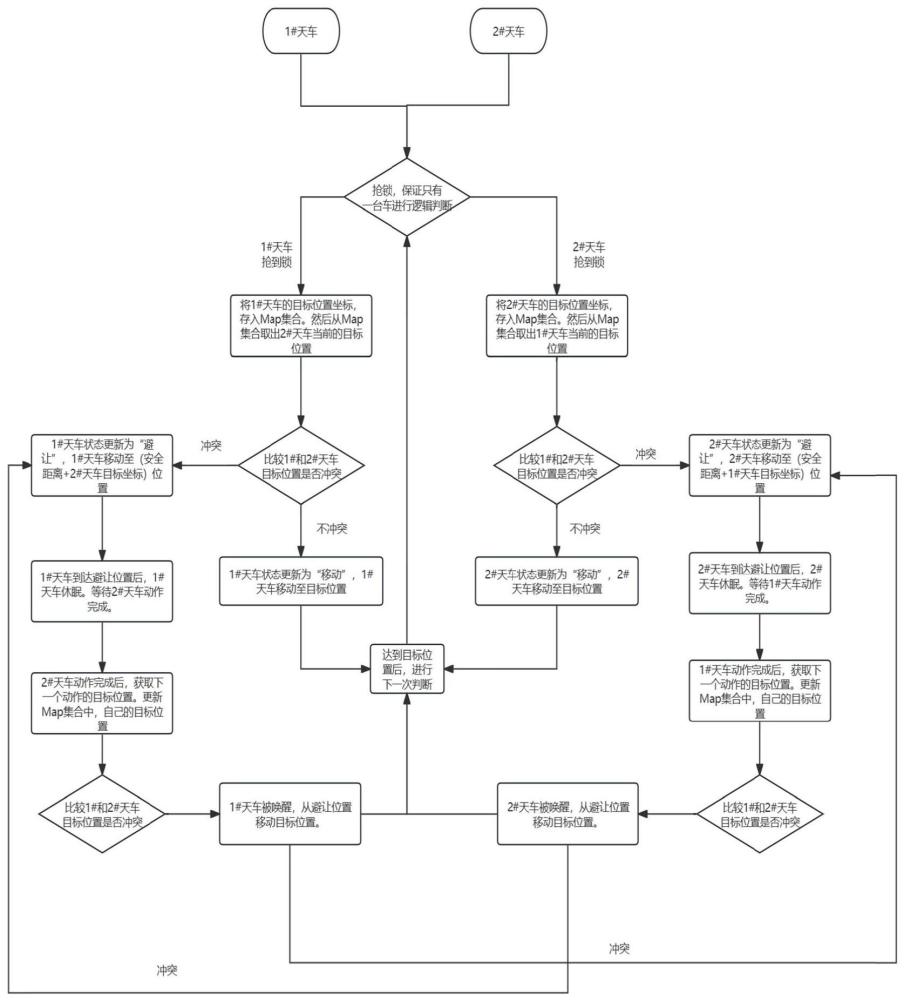
4、s1:构建同跨天车中天车的控制线程,所述控制线程操控天车处于移动或避让的状态,所述不同天车的控制线程共同抢夺一把锁,以保证同一时刻只有抢到锁的天车进行运行逻辑判断;
5、s2:设计一个同跨天车的静态map集合,设计的map集合中的key值为每台天车的编号,value值为每台天车的目标位置,当天车抢夺到锁时,进行两车的移动冲突判断,所述抢到锁的天车的目标位置进行更新,更新为下个的动作的目标位置,未抢到锁的天车的目标位置保持原先位置不变;
6、s3:在同跨天车中设计各个天车的守护唤醒线程,所述守护唤醒线程与控制线程互相配合,根据天车不同的移动冲突情况,控制天车采取相应的处理方式,其具体的处理方式如下:
7、s3.1:天车的移动冲突与移动不冲突的处理;若天车移动冲突,则先判断同跨天车中不同天车的位置,再由控制线程控制当前移动冲突的天车执行避让动作,并移动至另一台天车目标位置加上或减去安全距离的坐标;若天车移动不冲突,则天车直接各自移动至目标位置;
8、s3.2:天车移动至冲突位置后的处理;天车由于移动冲突移动至避让位置后,该天车的控制线程执行等待指令,等待另一台天车移动之后,更新map集合数据,若天车之间的目标位置不再冲突,则该天车的守护唤醒线程执行唤醒指令,唤醒控制线程,将该被守护天车移动至目标位置;所述守护唤醒线程执行唤醒指令条件需满足:被守护天车状态为避让;被守护天车的避让动作完成,另一台天车状态为移动,且两车目标位置不冲突;
9、s3.3:两台天车连续移动冲突时的处理;若当两车均处于避让状态,则生成天车的特殊唤醒线程,天车的特殊唤醒线程在被守护天车处于避让完成的等待状态时唤醒该被守护天车的控制线程,将其移动至目标位置。
10、进一步地,所述步骤s1中,抢到锁的天车的控制线程,判断其天车的目标位置是否与另一台天车的目标位置冲突,若冲突,则当前天车状态为避让;若不冲突,当前天车状态为移动。
11、进一步地,所述步骤s1中,位于放料区不同侧即异侧库区的天车的控制线程共同抢夺一把锁时,完成放料任务用时短的天车先一步抢到锁,所述计算天车完成放料任务的用时公式为:
12、t=|x-x0|/v
13、其中,t表示为天车执行完成放料指令的用时,x表示为当前天车的坐标位置,x0表示为天车的放料区的坐标位置,v表示为天车的运行速度;
14、通过上式,计算不同天车完成放料任务用时,再比较天车用时大小关系,用时短的天车先一步抢到锁进行运行逻辑判断。
15、进一步地,所述步骤s2中,所述天车的位置坐标的精度是mm,进行两车的移动冲突判断时,若当前天车为左侧天车,当前天车前往的目标位置小于另一台天车的目标位置并且两车目标位置差>=15000mm,双车的移动位于安全位置,则当前天车移动不冲突,反之移动冲突;若当前天车为右侧天车,当前天车的目标位置大于另一台天车的目标位置且两者距离差>=15000mm,双车的移动位于安全位置,则当前天车移动不冲突,反之,移动冲突。
16、进一步地,所述步骤s3.1中,进行天车的移动冲突与移动不冲突的处理时,若判定当天车移动冲突且当前天车的位置为左侧天车时,该天车执行避让动作,移动至另一台天车目标位置减去安全距离的坐标;若判定当天车移动冲突且当前天车的位置为右侧天车时,该天车移动至另一台天车目标位置加上安全距离的坐标;若天车移动不冲突,则天车直接移动至目标位置。
17、进一步地,所述步骤s3.1中,无论天车移动是否冲突,都更新静态map集合数据,将其天车value值更新为当前的目标位置坐标值。
18、进一步地,所述步骤s3.2中,两车均处于避让状态的过程为:若出现天车1放料,天车2放料避让,天车2放料完毕准备吸料时,发现与天车1目标位置再次冲突,天车2执行避让指令,而当天车1吸料完毕时,发现天车1目标位置与天车2目标再次冲突,天车1也只能走避让位置,此时两车均处于避让状态;两车均处于避让状态时,天车的特殊唤醒线程在被守护天车2处于避让完成的等待状态时唤醒该天车的控制线程,将其移动至目标位置。
19、进一步地,所述步骤s3.2中,守护唤醒线程会定时去查看map集合数据,若发现map集合的目标数据不再冲突且守护天车正处于避让动作完成后的等待状态,守护唤醒线程会将天车的控制线程唤醒,将天车移动至目标位置;所述守护唤醒线程处于轮询工作中,一直在工作,当控制线程不再工作进行销毁时,守护线程亦不再工作,进行销毁。
20、进一步地,所述步骤s3.3中,所述特殊唤醒线程为一次性作业,特殊唤醒线程执行唤醒指令,唤醒被守护的天车后,该线程即销毁。
21、进一步地,所述协同调度方法还包括定制天车移动权,当移动冲突时,位于放料区同一侧即同侧库区的天车吸料完成正准备放料时,距离放料区近的天车获得移动最高优先级,此种情况下,若天车移动冲突时,该距离放料区近的天车继续移动,不执行避让动作。
22、进一步地,所述定制天车的移动权成立的条件为存在不等式
23、|x1-x0|>|x2-x0|恒成立,不等式中的x1和x2表示为位于放料区同一侧即同侧库区的天车的位置坐标,不等式表达的含义为:两台天车执行指令的途中,若其中一台天车的距放料区的距离一直小于另一台天车时,则该距离放料区近的天车获得移动最高优先级,不执行避让动作。
24、本发明的有益效果在于:
25、(1)本发明基于map集合技术和线程技术控制天车合理执行等待、避让或移动的调度任务,从而实现同跨天车的协同调度,实现同跨两台天车在同侧或异侧的连续抓料、放料与避让动作。
26、(2)本发明能够实现双天车的路径冲突消解和有序避让,保证了双天车的工作效率和工作进程。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200456.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。