一种造船业智能机器人应用平台仿真系统的制作方法
- 国知局
- 2024-08-01 00:17:06
本发明涉及电气自动化领域,具体为一种造船业智能机器人应用平台仿真系统。
背景技术:
1、为了解决船厂生产制造效率低、成本高、人工短缺等问题,将智能机器人与门架等设备相结合,依托自动控制、机器人编程等技术,搭建一个通用智能机器人应用平台,以实现较高程度的自动化。实际应用中由于船厂车间差异化较大,功能需求复杂,为了更好的满足船厂的使用需求、成本控制等,在平台实际制造前,需对平台进行一定程度的仿真,基于此,本发明提供了一种造船业智能机器人应用平台仿真系统。
技术实现思路
1、本发明的目的在于提供一种造船业智能机器人应用平台仿真系统,以解决上述背景技术中提出的问题。
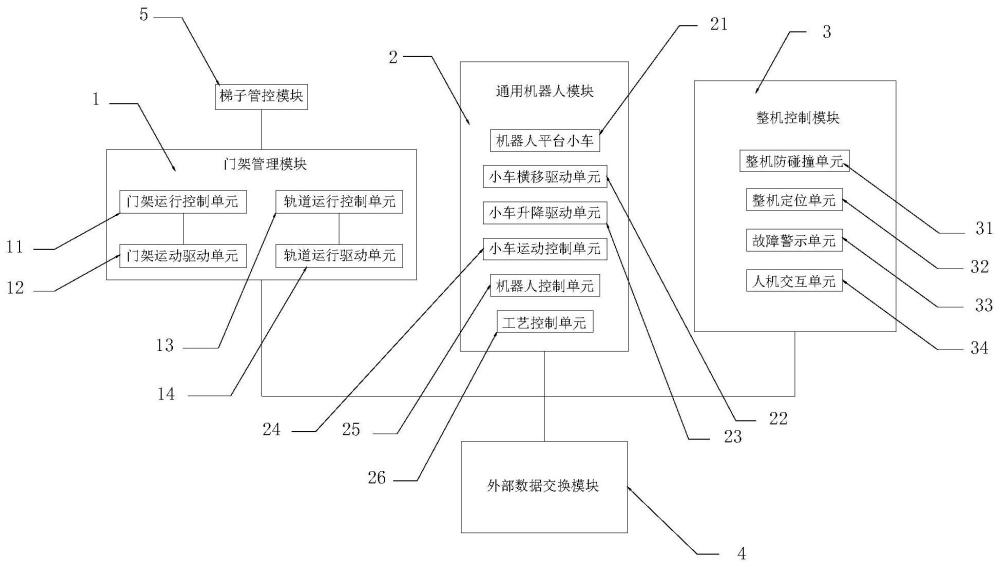
2、为实现上述目的,本发明提供如下技术方案:一种造船业智能机器人应用平台仿真系统,包括门架管理模块、通用机器人模块、整机控制模块以及外部数据交换模块,所述门架管理模块、通用机器人模块、整机控制模块均与外部数据交换模块电性连接,所述外部数据交换模块与使用人员进行数据交互;所述门架管理模块用于管控门架以及轨道的运行,所述通用机器人模块用于管控机器人以及承载机器人的平台小车的运行,所述整机控制模块用于管控整机的驱动运行。
3、优选的,所述门架管理模块包括门架运行控制单元以及门架运行驱动单元,所述门架运行控制单元接收外部数据交换模块发出的驱动信号,并发送至门架运行驱动单元产生响应,驱动门架结构工作。
4、优选的,所述门架管理模块还包括轨道运行控制单元以及轨道运行驱动单元,所述轨道运行控制单元接收外部数据交换模块发出的驱动信号,并发送至轨道运行驱动单元产生响应,驱动轨道结构工作。
5、优选的,所述门架管理模块连接有梯子管控模块,所述梯子管控模块用于管控现场电动梯子的工作。
6、优选的,所述通用机器人模块包括机器人平台小车、小车横移驱动单元、小车升降驱动单元、小车运动控制单元,所述小车运动控制单元接收外部数据交换模块发出的驱动信号,并发送至小车横移驱动单元、小车升降驱动单元产生响应,驱动机器人平台小车工作。
7、优选的,所述通用机器人模块还包括机器人控制单元以及工艺控制单元,所述机器人控制单元用于管控机器人的工作,工艺控制单元管控机器人进行焊接、划线、喷砂工艺的加工。
8、优选的,所述整机控制模块包括整机防碰撞单元、整机定位单元、故障警示单元,所述整机定位单元对设备位置进行定位,整机防碰撞单元检测障碍的位置并规划进行躲避,障碍的位置通过故障警示单元进行警示。
9、优选的,所述外部数据交换模块设置有ui人机交互界面,所述整机控制模块设置有人机交互单元,使用人员通过ui人机交互界面与人机交互单元进行交互信息。
10、与现有技术相比,本发明的有益效果是:本发明通过利用离线仿真技术,构造虚拟应用平台及其工作环境,从不同的角度观察预设功能的完成情况,进行虚拟在线演示;同时利用虚拟通信技术,可实现智能机器人与plc、ui之间的通信,完成数据交换,测试人机交互功能。最终目的是模拟整个平台全生产周期的工作状态,缩短项目周期,节约生产制造成本。
技术特征:1.一种造船业智能机器人应用平台仿真系统,其特征在于:包括门架管理模块(1)、通用机器人模块(2)、整机控制模块(3)以及外部数据交换模块(4),所述门架管理模块(1)、通用机器人模块(2)、整机控制模块(3)均与外部数据交换模块(4)电性连接,所述外部数据交换模块(4)与使用人员进行数据交互;所述门架管理模块(1)用于管控门架以及轨道的运行,所述通用机器人模块(2)用于管控机器人以及承载机器人的平台小车的运行,所述整机控制模块(3)用于管控整机的驱动运行。
2.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述门架管理模块(1)包括门架运行控制单元(11)以及门架运行驱动单元(12),所述门架运行控制单元(11)接收外部数据交换模块(4)发出的驱动信号,并发送至门架运行驱动单元(12)产生响应,驱动门架结构工作。
3.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述门架管理模块(1)还包括轨道运行控制单元(13)以及轨道运行驱动单元(14),所述轨道运行控制单元(13)接收外部数据交换模块(4)发出的驱动信号,并发送至轨道运行驱动单元(14)产生响应,驱动轨道结构工作。
4.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述门架管理模块(1)连接有梯子管控模块(5),所述梯子管控模块(5)用于管控现场电动梯子的工作。
5.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述通用机器人模块(2)包括机器人平台小车(21)、小车横移驱动单元(22)、小车升降驱动单元(23)、小车运动控制单元(24),所述小车运动控制单元(24)接收外部数据交换模块(4)发出的驱动信号,并发送至小车横移驱动单元(22)、小车升降驱动单元(23)产生响应,驱动机器人平台小车(21)工作。
6.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述通用机器人模块(2)还包括机器人控制单元(25)以及工艺控制单元(26),所述机器人控制单元(25)用于管控机器人的工作,工艺控制单元(26)管控机器人进行焊接、划线、喷砂工艺的加工。
7.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述整机控制模块(3)包括整机防碰撞单元(31)、整机定位单元(32)、故障警示单元(33),所述整机定位单元(32)对设备位置进行定位,整机防碰撞单元(31)检测障碍的位置并规划进行躲避,障碍的位置通过故障警示单元(33)进行警示。
8.根据权利要求1所述的一种造船业智能机器人应用平台仿真系统,其特征在于:所述外部数据交换模块(4)设置有ui人机交互界面,所述整机控制模块(3)设置有人机交互单元(34),使用人员通过ui人机交互界面与人机交互单元(34)进行交互信息。
技术总结本发明涉及电气自动化领域,具体公开了一种造船业智能机器人应用平台仿真系统,包括门架管理模块、通用机器人模块、整机控制模块以及外部数据交换模块,所述门架管理模块、通用机器人模块、整机控制模块均与外部数据交换模块电性连接,所述外部数据交换模块与使用人员进行数据交互;所述门架管理模块用于管控门架以及轨道的运行,所述通用机器人模块用于管控机器人以及承载机器人的平台小车的运行,所述整机控制模块用于管控整机的驱动运行;本发明所提供的平台仿真系统,行车用来保证智能机器人在整个车间内的大范围移动和定位,智能机器人按功能用来进行车间内的焊接、划线、喷砂工作。技术研发人员:魏道新,汪洋,张铮,刘畋宏,张俊杰,彭敏林,衡超,张军,徐亮,陈刚,单珊,韩荃受保护的技术使用者:中船第九设计研究院工程有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200447.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。