一种基于协同控制的垃圾渗滤液处理控制方法与流程
- 国知局
- 2024-08-01 00:21:05
本发明属于垃圾渗滤液处理控制应用,尤其涉及一种基于协同控制的垃圾渗滤液处理控制方法。
背景技术:
1、在垃圾堆放和填埋过程中因发酵、降水淋溶、地表和地下水渗透而产生垃圾渗滤废水,渗滤液成分复杂、有机物浓度高、氨氮浓度高、含有多种重金属离子、含盐量高、呈深黑色、散发恶臭;未经处理的垃圾渗滤液流经地表或渗入地下水后,会对环境造成严重的二次污染。因此,垃圾渗滤液的污染控制成为垃圾无害化处理的重要组成内容。
2、由于垃圾渗滤液处理过程中的生物化学反应复杂,涉及的变量过多,同时各个处理环节之间存在时滞和耦合性,容易受到各种因素的干扰,需要对反应池中的水质参数进行控制。传统监测控制方案一般是根据实际需要定期进行人工取样,将水样带回实验室进行实验分析得到检测结果,再进行处理。然而,这种人工取样的方法无法全面准确地反映被监测点的水质连续动态变化情况,对反应池中水质信息的突变也无法及时掌握并做出应对。这样得到的监测数据往往不能反映出水质的真实情况,无法满足非线性、时变控制的需求。
技术实现思路
1、本发明针对垃圾渗滤液处理所存在的技术问题,提出一种设计合理、方法简单、理论性强且能够满足非线性、时变的一种基于协同控制的垃圾渗滤液处理控制方法。
2、为了达到上述目的,本发明采用的技术方案为:一种基于协同控制的垃圾渗滤液处理控制方法,包括如下步骤:
3、s1、获取垃圾渗滤液处理池中水浊度、酸碱度、溶解氧浓度以及硫化物浓度,设定水浊度规定值、酸碱度规定值、溶解氧浓度规定值以及硫化物浓度规定值,得到水浊度误差、酸碱度误差、溶解氧浓度误差以及硫化物浓度误差;
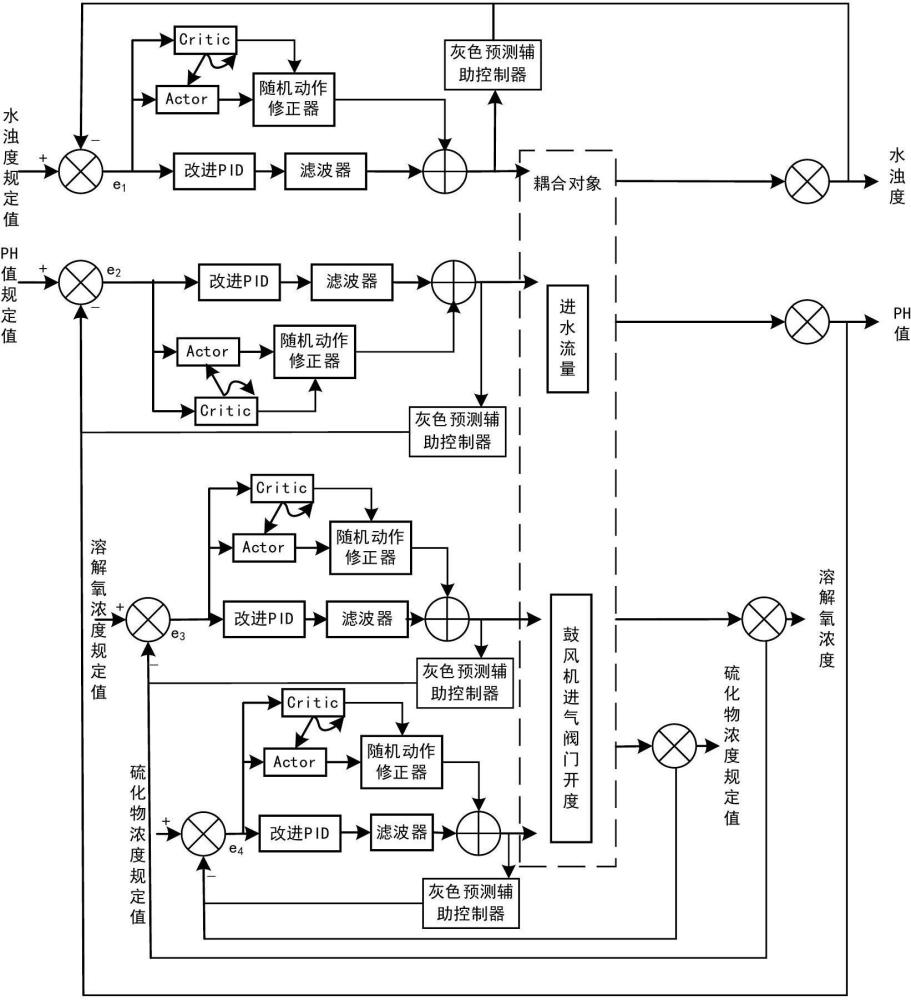
4、s2、构建协同控制模型,通过改进pid联合滤波器和强化学习中的actor-critic结构组建协同控制,水浊度误差、酸碱度误差、溶解氧浓度误差以及硫化物浓度误差分别作为协同控制的输入,各协同控制的输出分别作为耦合对象和灰色预测辅助控制器的输入,进而构建四个反馈控制,所述改进pid引入非线性变换函数,改进pid的控制公式为:
5、,其中,是输出,表示pid的系数,、为决定系数,0<<1,0<<1,和为非线性变化函数,其公式为:
6、,其中,为水浊度误差,为酸碱度误差,为溶解氧浓度误差,为硫化物浓度误差,为区间长度,其公式为:
7、,其中,为水浊度误差的变化率,为酸碱度误差的变化率,为溶解氧浓度误差的变化率,为硫化物浓度误差的变化率,为区间长度,e是自然对数的底数;
8、s3、以水浊度误差、酸碱度误差、溶解氧浓度误差以及硫化物浓度误差分别作为协同控制模型的输入,实现对进水流量和鼓风机进气阀门开度的控制。
9、作为优选,所述步骤s2中表示pid的系数包括比例、积分以及微分系数。
10、作为优选,所述滤波器为二阶滤波器,其传递函数为:
11、,其中,s为复变量,、、为可调系数,所述耦合对象包括进水流量和鼓风机进气阀门开度,所述灰色预测辅助控制器进行状态预测,其方程为:
12、,其中,表示累加生成序列,表示原始数据序列,和为待确定的参数。
13、作为优选,所述强化学习中的actor-critic结构中的actor用于进行测量估计,critic对当前的状态以及动作的表现进行估计,得到值函数用来给actor更新梯度,评价actor当前策略的好坏,critic通过采样的方式逼近更新值函数,值函数沿着最大收益方向更新策略的参数,随机动作修正器提供的修正值依赖于critic提供的值函数,所述值函数考虑优势学习,修改后的修正项的计算公式为:
14、,其中,、是t时刻的状态和动作,表示时刻的动作,表示q值中较小的一个,表示目标值网络的参数。
15、与现有技术相比,本发明的优点和积极效果在于:
16、本发明提出一种基于协同控制的垃圾渗滤液处理控制方法,通过改进pid联合滤波器和强化学习中的actor-critic结构组建协同控制,提高算法的策略学习效率和控制系统的稳定性,各协同控制的输出分别作为耦合对象和灰色预测辅助控制器的输入,进而构建四个反馈控制,得到满足非线性、时变的高效率的垃圾渗滤液处理控制。改进pid引入非线性变化函数,控制器的增益参数随控制误差而变化,提高了算法的适应能力。强化学习值函数考虑优势学习,减小非最优动作对应的q值估计来拉开最优动作状态值和非最优状态值的差距。
技术特征:1.一种基于协同控制的垃圾渗滤液处理控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于协同控制的垃圾渗滤液处理控制方法,其特征在于,所述步骤s2中表示pid的系数包括比例、积分以及微分系数。
3.根据权利要求1所述的一种基于协同控制的垃圾渗滤液处理控制方法,其特征在于,所述滤波器为二阶滤波器,其传递函数为:
4.根据权利要求1所述的一种基于协同控制的垃圾渗滤液处理控制方法,其特征在于,所述强化学习中的actor-critic结构中的actor用于进行测量估计,critic对当前的状态以及动作的表现进行估计,得到值函数用来给actor更新梯度,评价actor当前策略的好坏,critic通过采样的方式逼近更新值函数,值函数沿着最大收益方向更新策略的参数,随机动作修正器提供的修正值依赖于critic提供的值函数,所述值函数考虑优势学习,修改后的修正项的计算公式为:
技术总结本发明属于垃圾渗滤液处理控制应用技术领域,尤其涉及一种基于协同控制的垃圾渗滤液处理控制方法。通过改进PID联合滤波器和强化学习中的Actor‑Critic结构组建协同控制,提高算法的策略学习效率和控制系统的稳定性,各协同控制的输出分别作为耦合对象和灰色预测辅助控制器的输入,进而构建四个反馈控制,得到满足非线性、时变的高效率的垃圾渗滤液处理控制。改进PID引入非线性变化函数,控制器的增益参数随控制误差而变化,提高了算法的适应能力。强化学习值函数考虑优势学习,减小非最优动作对应的Q值估计来拉开最优动作状态值和非最优状态值的差距。技术研发人员:谭卫星,王芬芬受保护的技术使用者:山东智和创信息技术有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200718.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表