一种机器人的屏幕翻转控制电路的制作方法
- 国知局
- 2024-08-01 00:21:59
本技术涉及机器人控制,具体地说,涉及一种机器人的屏幕翻转控制电路。
背景技术:
1、随着科技的不断发展,机器人应用范围越来越广,在机器人应用时,屏幕为主要的信息呈现器件,为了适用不同人,机器人需要翻转控制屏幕,来使屏幕正对使用者,方便使用者操作和获取信息。
2、机器人控制屏幕转动时,通常使用电机直接控制,但是电机在工作时,由于电路中的不稳定因素和环境影响,使得电机速度控制不够稳定,最终屏幕不会转动到最合适的位置,还需要额外调整,实用性不强。
技术实现思路
1、本实用新型的目的在于提供一种机器人的屏幕翻转控制电路,以解决上述背景技术中提出的电机控制不够稳定的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
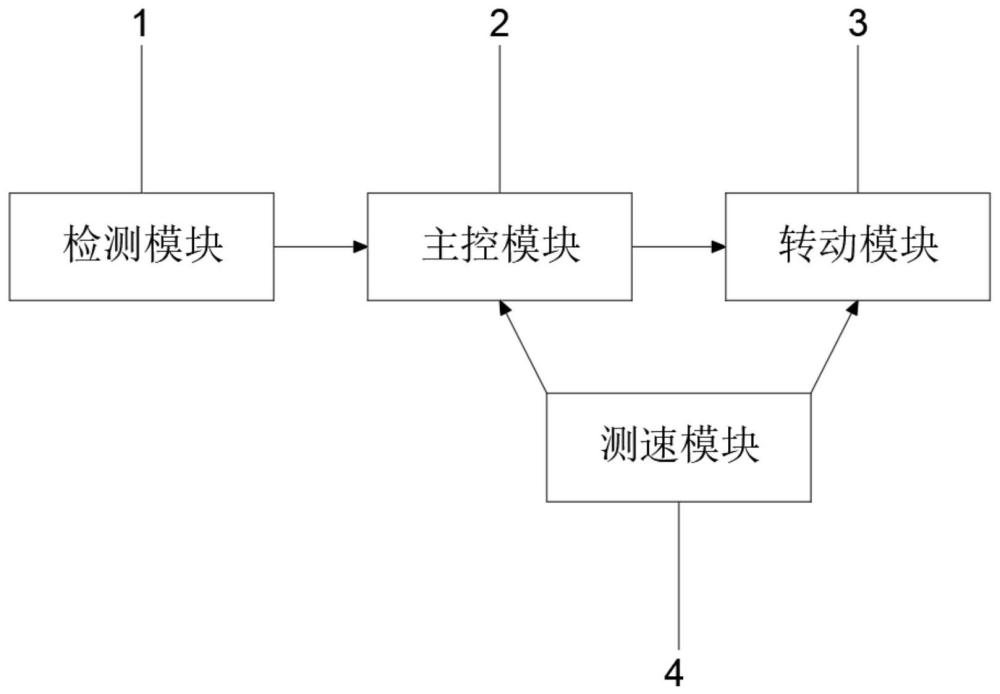
3、一种机器人的屏幕翻转控制电路,包括检测模块、主控模块、转动模块和测速模块,所述检测模块用于检测识别人脸所在位置,所述转动模块内的电机m用于控制屏幕翻转,电机m与配套的减速器控制屏幕翻转至正对人脸的角度,所述测速模块用于测量电机m的转速,所述主控模块基于pwm控制电机m转速,所述主控模块比对所述测速模块测量的转速和设定转速并使用pid算法控制电机m。
4、作为优选,所述检测模块和所述主控模块信号连接,所述检测模块基于人脸识别技术检测人脸位置。
5、作为优选,所述转动模块包括第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、电机m、第一三极管q1、第二三极管q2、第三三极管q3、第四三极管q4、第五三极管q5、第六三极管q6、第一二极管d1、第二二极管d2、第三二极管d3、第四二极管d4和电源vcc;
6、第一电阻r1第一端接所述主控模块,第一电阻r1第二端接第一三极管q1基极,第二电阻r2第一端接电源vcc,第二电阻r2第二端接第一三极管q1集电极,第一三极管q1发射极接地,第二三极管q2集电极接电源vcc,第二三极管q2基极接第二电阻r2第二端,第二三极管q2发射极接电机m第一端,第三三极管q3基极接第二电阻r2第二端,第三三极管q3发射极接电机m第一端,第三三极管q3集电极接地,电机m第二端接第五电阻r5第一端,第三电阻r3第一端接第四三极管q4基极,第三电阻r3第二端接所述主控模块,第四电阻r4第一端接电源vcc,第四电阻r4第二端接第四三极管q4集电极,第四三极管q4发射极接地,第五三极管q5集电极接电源vcc,第五三极管q5发射极接第五电阻r5第二端,第五三极管q5基极接第四电阻r4第二端,第六三极管q6发射极接第五电阻r5第二端,第六三极管q6集电极接地,第六三极管q6基极接第四电阻r4第二端;
7、第一二极管d1负极接电源vcc,第一二极管d1正极接电机m第一端,第二二极管d2负极接电机m第一端,第二二极管d2正极接地,第三二极管d3负极接电源vcc,第三二极管d3正极接第五电阻r5第二端,第四二极管d4负极接第五电阻r5第二端,第四二极管d4正极接地。
8、作为优选,所述测速模块包括霍尔器件和磁钢,磁钢和霍尔器件相互配合,磁钢安装于电机m转轴上,霍尔器件输出引脚与所述主控模块连接。
9、作为优选,所述主控模块比对所述测速模块测量的转速和设定转速并使用pid算法控制电机m的具体步骤包括:
10、计算转速误差e:
11、e=v0-v1
12、其中,v0为设定转速,v1为测量转速;
13、计算比例p:
14、p=kp×e
15、其中,kp为比例增益;
16、计算积分i:
17、
18、其中,ki为积分增益,e(t)为随时间变化的转速误差;
19、计算微分d:
20、
21、其中,kd为微分增益,为转速误差的导数;
22、计算总输出u:
23、u=p+i+d
24、pwm调制:
25、
26、其中,d为pwm信号的占空比,umax为pwm信号的最大值,t为pwm信号的周期。
27、与现有技术相比,本实用新型的有益效果是:
28、该实用新型通过设置检测模块追踪人脸,再通过主控模块控制转动模块内的电机m工作,电机m和配套的减速器共同工作使屏幕调整到合适位置,且通过测速模块测得电机m的转速,反馈给主控模块,使控制更加稳定,实用性更强。
技术特征:1.一种机器人的屏幕翻转控制电路,包括检测模块(1)、主控模块(2)、转动模块(3)和测速模块(4),其特征在于:所述检测模块(1)用于检测识别人脸所在位置,所述转动模块(3)内的电机m用于控制屏幕翻转,电机m与配套的减速器控制屏幕翻转至正对人脸的角度,所述测速模块(4)用于测量电机m的转速,所述主控模块(2)基于pwm控制电机m转速,所述主控模块(2)比对所述测速模块(4)测量的转速和设定转速并使用pid算法控制电机m。
2.根据权利要求1所述的机器人的屏幕翻转控制电路,其特征在于:所述检测模块(1)和所述主控模块(2)信号连接,所述检测模块(1)基于人脸识别技术检测人脸位置。
3.根据权利要求1所述的机器人的屏幕翻转控制电路,其特征在于:所述转动模块(3)包括第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、电机m、第一三极管q1、第二三极管q2、第三三极管q3、第四三极管q4、第五三极管q5、第六三极管q6、第一二极管d1、第二二极管d2、第三二极管d3、第四二极管d4和电源vcc;
4.根据权利要求1所述的机器人的屏幕翻转控制电路,其特征在于:所述测速模块(4)包括霍尔器件和磁钢,磁钢和霍尔器件相互配合,磁钢安装于电机m转轴上,霍尔器件输出引脚与所述主控模块(2)连接。
5.根据权利要求1所述的机器人的屏幕翻转控制电路,其特征在于:所述主控模块(2)比对所述测速模块(4)测量的转速和设定转速并使用pid算法控制电机m的具体步骤包括:
技术总结本技术涉及机器人控制技术领域,具体地说,涉及一种机器人的屏幕翻转控制电路,包括检测模块、主控模块、转动模块和测速模块,检测模块用于检测识别人脸所在位置,转动模块内的电机M用于控制屏幕翻转,电机M与配套的减速器控制屏幕翻转至正对人脸的角度,测速模块用于测量电机M的转速,主控模块基于PWM控制电机M转速,主控模块比对测速模块测量的转速和设定转速并使用PID算法控制电机M。本技术中,通过设置检测模块追踪人脸,再通过主控模块控制转动模块内的电机M工作,电机M和配套的减速器共同工作使屏幕调整到合适位置,且通过测速模块测得电机M的转速,反馈给主控模块,使控制更加稳定,实用性更强。技术研发人员:钟建鹏受保护的技术使用者:萃同电子科技(上海)有限公司技术研发日:20240112技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200760.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表