永磁同步电机抗冲击模型预测力矩平滑控制方法、装置、设备和介质
- 国知局
- 2024-07-31 17:28:56
本发明涉及永磁同步电机,具体而言,涉及一种永磁同步电机抗冲击模型预测力矩平滑控制方法、装置和设备。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor, pmsm)以其卓越的效率、功率密度和控制精度而著称,是一种三相交流电动机。这种电机由三组相位差120度的定子绕组和装有永磁体的转子组成。通过向三相逆变器发送pwm(脉冲宽度调制)信号,控制igbt(绝缘栅双极晶体管)的开关状态,从而在定子绕组中产生电压和三相电流,进而产生定子磁场与转子磁场相互作用,驱动电机旋转。
2、与传统的感应电机相比,pmsm因其高功率密度、高效率、优异的动态响应和较小的扭矩波动等特性,在工业、制造业和新能源汽车等高性能需求领域得到了广泛应用。
3、但是,pmsm在转速/转矩象限切换、加速/减速以及加/卸载过程中可能会遇到较大的冲击和扭矩过冲问题,这不仅可能影响乘坐舒适性,还可能导致与电机相连的传动系统磨损加剧,缩短使用寿命,特别是在没有缓冲装置的电机驱动系统中,这些问题尤为突出。
4、目前市场上的pmsm降低冲击控制方法主要分为两大类:
5、第一类方法采用扭矩控制模式,通过在参考扭矩中加入过渡过程,如斜坡、多项式插值、样条曲线插值或s曲线过渡等,以减少冲击。但这种方法由于依赖扭矩控制,无法确保速度的精确跟踪。即使引入了额外的速度控制环,不当的过渡时间设置仍可能导致速度振荡加剧、系统带宽降低和稳定性问题。
6、第二类方法采用速度控制模式,同样在参考速度中加入过渡过程。尽管这种方法能够实现速度的平滑过渡,但它无法有效降低加/卸载时的冲击,也无法实现扭矩输出的平滑化。
7、这些方法各有优势和局限性,因此在实际应用中需要根据具体需求和系统特性进行选择和优化。有鉴于此,申请人在研究了现有的技术后特提出本技术。
技术实现思路
1、本发明提供了一种永磁同步电机抗冲击模型预测力矩平滑控制方法、装置和设备,以改善上述技术问题中的至少一个。
2、第一方面、本发明实施例提供了一种永磁同步电机抗冲击模型预测力矩平滑控制方法,其包含步骤s1至步骤s7。
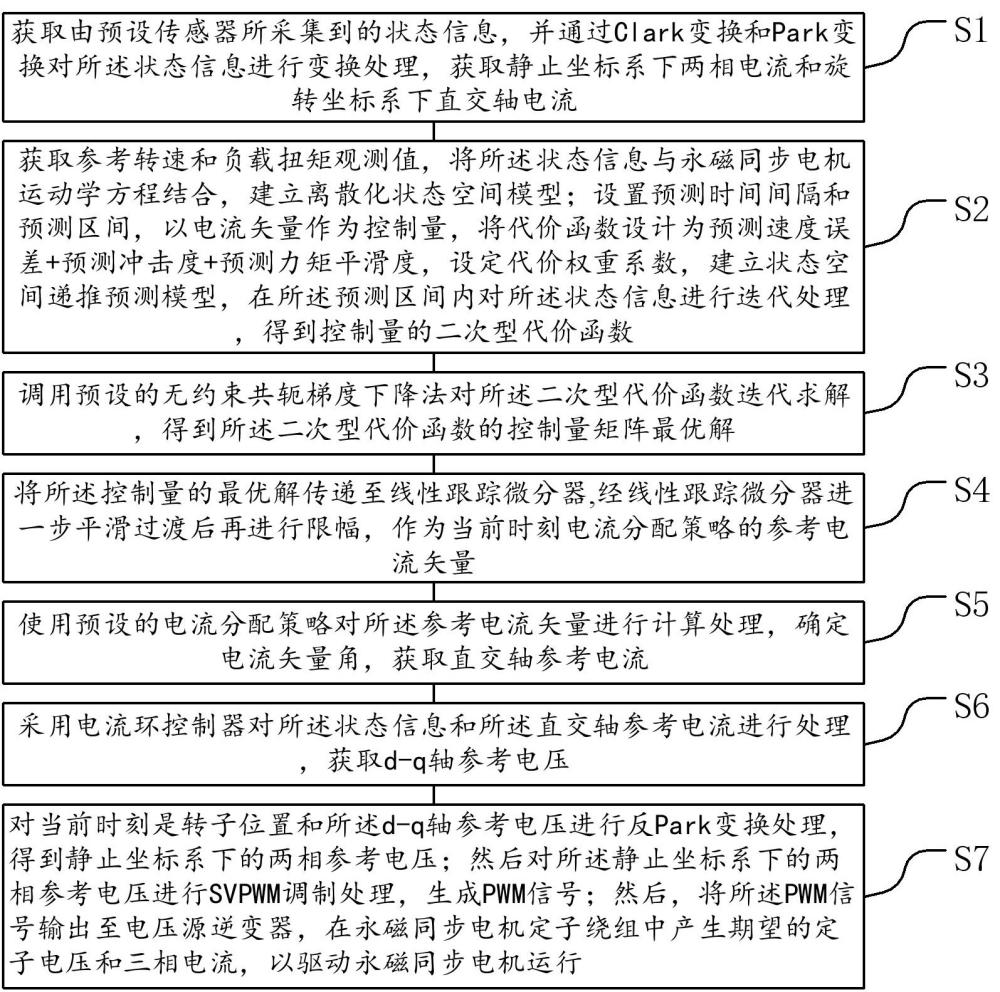
3、s1、获取由预设传感器所采集到的状态信息,并通过clark变换和park变换对所述状态信息进行变换处理,获取静止坐标系下两相电流和旋转坐标系下直交轴电流。其中,所述状态信息包括近两次采样时刻的三相电流、转子位置和机械角速度。
4、s2、获取参考转速和负载扭矩观测值,将所述状态信息与永磁同步电机运动学方程结合,建立离散化状态空间模型。设置预测时间间隔和预测区间,以电流矢量作为控制量,将代价函数设计为预测速度误差+预测冲击度+预测力矩平滑度,设定代价权重系数,建立状态空间递推预测模型,在所述预测区间内对所述状态信息进行迭代处理,得到控制量的二次型代价函数。
5、s3、调用预设的无约束共轭梯度下降法对所述二次型代价函数迭代求解,得到所述二次型代价函数的控制量矩阵最优解,然后令。式中,表示当前采样时刻二次型代价函数电流矢量最优解,表示控制量矩阵最优解的第一行。
6、s4、将所述控制量的最优解传递至线性跟踪微分器,经线性跟踪微分器进一步平滑过渡后再进行限幅,作为当前时刻电流分配策略的参考电流矢量。
7、s5、使用预设的电流分配策略对所述参考电流矢量进行计算处理,确定电流矢量角,获取直交轴参考电流。
8、s6、采用电流环控制器对所述状态信息和所述直交轴参考电流进行处理,获取d-q轴参考电压。
9、s7、对当前时刻的转子位置和所述d-q轴参考电压进行反park变换处理,得到静止坐标系下的两相参考电压和。然后,对所述静止坐标系下的两相参考电压进行svpwm调制处理,生成pwm信号。然后,将所述pwm信号输出至电压源逆变器,在永磁同步电机定子绕组中产生期望的定子电压和三相电流,以驱动永磁同步电机运行。
10、在一个可选的实施例中,步骤s2包括步骤s201至步骤s219。
11、s201、根据所述负载扭矩观测值和永磁同步电机的运动学特性,构建永磁同步电机动力学模型。其中,所述永磁同步电机动力学模型的表达式为:式中,表示当前时刻永磁同步电机的机械角速度,表示当前时刻永磁同步电机的机械角速度的导数,为粘滞阻尼系数,表示转动惯量,表示当前采样时刻,表示当前时刻负载扭矩观测值,为转矩常数,表示当前时刻待指定的电流矢量。
12、s202、设定预测时间间隔为,然后使用一阶前向欧拉方法对永磁同步电机动力学模型进行离散化处理,获取永磁同步电机离散化动力学模型。其中,永磁同步电机离散化动力学模型的表达式为:式中,为预测第时刻永磁同步电机的机械角速度,为粘滞阻尼系数,为预测时间间隔,表示转动惯量,表示当前时刻永磁同步电机的机械角速度,表示当前时刻负载扭矩观测值,为转矩常数,表示当前时刻待指定的电流矢量。
13、s203、将当前时刻机械角速度定义为状态变量。
14、s204、将当前时刻待指定的电流矢量定义为控制变量。
15、s205、根据所述状态变量和所述控制变量,构建离散化状态空间模型。其中,离散化状态空间模型的表达式为:式中,为预测的下一时刻状态,为永磁同步电机的机械特性矩阵,为力矩响应矩阵,为负载扭矩干扰矩阵。
16、s206、令为机械角速度指令参考值,将实际的机械角速度赋值给,即:令输出,定义机械角速度输出误差。其中,机械角速度输出误差的表达式为:式中,为机械角速度指令参考值、为输出、为机械角速度实际值。
17、s207、定义冲击度为机械角速度的二阶导数。其中,冲击度的表达式为:式中,为冲击度,表示导数,为机械角速度,为系统时间。
18、s208、根据所述冲击度,采用二阶前向差分法建立预测冲击度离散化模型。
19、预测冲击度离散化模型的表达式为:式中,为预测第时刻的冲击度,为根据第时刻状态预测得到的第时刻状态,为根据第时刻状态预测得到的第时刻状态,为当前时刻的状态变量,为预测时间间隔。
20、s209、定义力矩平滑度为控制量的二阶导数。其中,力矩平滑度的表达式为:式中,为控制量、表示导数,为系统时间。
21、s210、根据所述力矩平滑度,采用二阶后向差分法建立预测力矩平滑度离散化模型。其中,预测力矩平滑度离散化模型的表达式为:式中,为预测第时刻的力矩平滑度,为当前时刻的控制变量,为第时刻的电流矢量,为第时刻的电流矢量,为预测时间间隔,表示导数,为系统时间。
22、s211、根据所述机械角速度输出误差、预测冲击度离散化模型和预测力矩平滑度离散化模型,定义第一代价函数为预测速度误差+预测冲击度+预测力矩平滑度。式中,为预测区间的长度,表示基于当前时刻向后预测步,表示转置,表示预测的第时刻机械角速度输出误差,表示预测的第时刻冲击度,表示预测的第时刻力矩平滑度,为每个预测机械角速度与期望值之间误差累加的权重系数,为每个预测机械角速度二阶导数累加的权重系数,为每个预测力矩平滑度(电流矢量二阶导数)累加的权重系数。
23、s212、在所述预测区间内,对所述当前时刻状态信息进行迭代处理,得到状态空间预测模型的递推表达式:式中,为永磁同步电机的机械特性矩阵的嵌套矩阵,为当前时刻的状态变量的嵌套矩阵,为力矩响应矩阵的嵌套矩阵,为当前时刻的控制变量的嵌套矩阵,为负载扭矩干扰矩阵的系数矩阵,为负载扭矩干扰矩阵。
24、s213、将所述第一代价函数中的:展开处理,并定义为第二代价函数。其中,所述第二代价函数的表达式为:式中,为机械角速度指令参考值的列矩阵,为变换后的矩阵,为变换矩阵集合,为预测的状态变量的列矩阵,表示转置,为每个预测机械角速度与期望值之间误差累加的权重系数的对角矩阵集合。
25、s214、将状态空间递推预测模型代入第二代价函数,并舍去初始状态常数项,获取新的第二代价函数。
26、s215、将所述第一代价函数中的第二项:展开处理,并定义为第三代价函数 。其中,第三代价函数表达式为:式中,表示第三代价函数、为预测的冲击度的列矩阵,表示转置,为每个预测机械角速度二阶导数累加的权重系数的对角矩阵集合;
27、s216、将状态空间递推预测模型代入第三代价函数,并舍去初始状态常数项,获取新的第三代价函数;
28、s217、将所述第一代价函数中的第三项:展开处理,并定义为第四代价函数。
29、第四代价函数的表达式为:式中,为当前时刻的控制变量,为第时刻的电流矢量,为第时刻的电流矢量,表示转置,为每个预测力矩平滑度(电流矢量二阶导数)累加的权重系数的对角矩阵集合。
30、s218、将状态空间递推预测模型代入第四代价函数,并舍去初始状态常数项,获取新的第四代价函数;
31、s219、根据所述新的第二代价函数、所述新的第三代价函数和所述新的第四代价函数,构建控制量的二次型代价函数。。
32、在一个可选的实施例中,所述预设的无约束共轭梯度下降法的算法作用为:对于二次型函数,求。式中,表示变量向量,表示转置,表示二次型矩阵,表示线性项矩阵,表示使二次型函数取得最小值的变量值。
33、在一个可选的实施例中,所述预设的无约束共轭梯度下降法的算法框架如下:
34、步骤一:设定迭代初值、精度阈值和最大迭代次数。
35、步骤二:计算初始位置的梯度,定义负梯度。式中,表示梯度、表示二次型矩阵、表示自变量、为参数。
36、步骤三:令,进行以下循环:
37、1、如果或,停止迭代,退出循环,输出作为最优解。其中,表示每次迭代的变量向量,表示对应的梯度值,表示的2范数。
38、2、计算下降步长,所述。式中,表示对应的负梯度。
39、3、更新迭代点,所述。
40、4、计算新梯度,所述。
41、5、计算组合系数,所述。
42、6、计算共轭方向,所述。
43、7、更新,,令,返回循环步骤1重复循环。
44、在一个可选的实施例中,步骤s4中,所述线性跟踪微分器的传递函数表达式为:式中,为拉普拉斯算子,为所述线性跟踪微分器的收敛速度。
45、在一个可选的实施例中,步骤s4中,参考电流矢量的表达式为:式中,为参考电流矢量,表示限幅函数,为线性跟踪微分器的传递函数,表示当前采样时刻二次型代价函数电流矢量最优解、表示幅值上限,表示幅值下限。
46、在一个可选的实施例中,所述永磁同步电机抗冲击模型预测力矩平滑控制方法用以控制内置式永磁同步电机或表贴式永磁同步电机。
47、在一个可选的实施例中,所述直交轴参考电流的给定方法为控制、最大转矩电流比控制、弱磁控制、最大转矩电压比控制或最小损耗控制。
48、第二方面、本发明实施例提供了一种永磁同步电机抗冲击模型预测力矩平滑控制装置,包含数据获取模块、代价函数构建模块、代价函数求解模块、电流矢量计算模块、参考电流计算模块、参考电压计算模块和调制驱动模块。
49、数据获取模块,用于获取由预设传感器所采集到的状态信息,并通过clark变换和park变换对所述状态信息进行变换处理,获取静止坐标系下两相电流和旋转坐标系下直交轴电流。其中,所述状态信息包括近两次采样时刻的三相电流、转子位置和机械角速度。
50、代价函数构建模块,用于获取参考转速和负载扭矩观测值,将所述状态信息与永磁同步电机运动学方程结合,建立离散化状态空间模型。设置预测时间间隔和预测区间,以电流矢量作为控制量,将代价函数设计为预测速度误差+预测冲击度+预测力矩平滑度,设定代价权重系数,建立状态空间递推预测模型,在所述预测区间内对所述状态信息进行迭代处理,得到控制量的二次型代价函数。
51、代价函数求解模块,用于调用预设的无约束共轭梯度下降法对所述二次型代价函数迭代求解,得到所述二次型代价函数的控制量矩阵最优解,然后令。式中,表示当前采样时刻二次型代价函数电流矢量最优解,表示控制量矩阵最优解的第一行。
52、电流矢量计算模块,用于将所述控制量的最优解传递至线性跟踪微分器,经线性跟踪微分器进一步平滑过渡后再进行限幅,作为当前时刻电流分配策略的参考电流矢量。
53、参考电流计算模块,用于使用预设的电流分配策略对所述参考电流矢量进行计算处理,确定电流矢量角,获取直交轴参考电流。
54、参考电压计算模块,用于采用电流环控制器对所述状态信息和所述直交轴参考电流进行处理,获取d-q轴参考电压。
55、调制驱动模块,用于对当前时刻的转子位置和所述d-q轴参考电压进行反park变换处理,得到静止坐标系下的两相参考电压。然后,对所述静止坐标系下的两相参考电压进行svpwm调制处理,生成pwm信号。然后,将所述pwm信号输出至电压源逆变器,在永磁同步电机定子绕组中产生期望的定子电压和三相电流,以驱动永磁同步电机运行。
56、第三方面、本发明实施例提供了一种永磁同步电机抗冲击模型预测力矩平滑控制设备,其包括传感器、处理器、存储器、pwm发生器和逆变器,以及存储在所述存储器内的计算机程序。所述计算机程序能够被所述处理器执行,以实现如第一方面任意一段所述的一种永磁同步电机抗冲击模型预测力矩平滑控制方法。
57、第四方面、本发明实施例提供了一种计算机可读存储介质。所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如第一方面任意一段所述的一种永磁同步电机抗冲击模型预测力矩平滑控制方法。
58、通过采用上述技术方案,本发明可以取得以下技术效果:
59、本发明实施例的永磁同步电机抗冲击模型预测力矩平滑控制方法能够使永磁同步电机速度跟踪精确的同时力矩平滑过渡,减小象限切换、加/减速和加/卸载时的冲击度。
60、方法包括速度环抗冲击模型预测力矩平滑控制和线性跟踪微分器。抗冲击模型预测力矩平滑控制包含状态采集、模型预测、滚动优化和反馈校正。具体的,基于采集的状态信息和永磁同步电机运动学模型,建立离散化状态空间模型。以电流矢量作为控制量,将代价函数设计为预测速度误差+预测冲击度+预测力矩平滑度,从而建立状态空间递推预测模型。通过无约束共轭梯度下降法迭代求解二次型代价函数,然后将控制量最优解传递至线性跟踪微分器,经线性跟踪微分器进一步平滑过渡后作为当前时刻参考电流矢量。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。