一种内置式永磁同步电机电流谐波抑制方法及系统
- 国知局
- 2024-07-31 17:58:29
本发明属于永磁同步电机,具体涉及一种内置式永磁同步电机电流谐波抑制方法及系统。
背景技术:
1、内置式永磁同步电机(interior permanent magnet synchronous motor,ipmsm)具有功率密度高、效率高、调速性能好、结构紧凑等优点,在工业应用和家用电器领域中得到了广泛的应用。在ipmsm控制系统中,由于逆变器具有死区时间和管压降等非线性特性,会在定子电流中引入时间谐波,同时,齿槽效应和磁饱和效应会将空间谐波引入定子电流中。对于空间谐波,抑制方法主要是优化电机的本体结构;对于时间谐波,抑制方法主要是优化电机的控制方法。目前,二阶广义积分器(sogi)由于数学模型简单、动态特性快等优点,在电网和电机控制中得到了广泛的应用。然而,当二阶广义积分器提取电流谐波时,待提取的电流谐波分量与其它电流分量在二阶广义积分器的输入电流信号中是互相耦合的,并且在保证快速动态性的前提下,二阶广义积分器对其它电流分量的衰减效果是不足的,因此电流谐波提取的误差相对较大。
2、专利公开号为cn113965129b,名称为一种永磁同步电机控制系统电流测量偏移误差的补偿方法的专利申请,包括:建立包含相电流测量偏移误差的永磁同步电机矢量控制系统;推导相电流测量偏移误差引起的电机稳态转速一次脉动方程;设计级联解耦二阶广义积分器结构,提取由相电流测量偏移误差引起的转速一次脉动分量并计算其幅值;设计相电流测量偏移误差补偿策略,利用粒子群算法调节该补偿算法中pi控制器的参数,使补偿算法的输出分别为a、b两相电流的相电流测量偏移误差补偿值,消除电流测量误差,抑制电机稳态转速的一次脉动。该专利申请需要多个sogi进行谐波提取,且解耦的不彻底,除了提取出来的谐波解耦以外,还有其它电流分量耦合在一起。
技术实现思路
1、为了克服上述现有技术中存在的问题,本发明的目的在于提供一种内置式永磁同步电机电流谐波抑制方法及系统,既能避免对传统二阶广义积分器的结构进行改造,又能将待提取的电流谐波与其它电流分量相互解耦。减小了其他电流分量对sogi提取电流谐波精度的影响,从而在保证动态响应的前提下减小了电流谐波提取的误差。
2、为实现上述目的,本发明采用的技术方案是:
3、一种内置式永磁同步电机电流谐波抑制方法,包括以下步骤:
4、s1:根据内置式永磁同步电机电流谐波模型,d-q同步旋转坐标系下,三相定子电流变换为d轴电流和q轴电流,包含电流谐波d轴和q轴的电流方程为:
5、
6、
7、其中,i1th是基波电流的幅值;θ1是基波电流的初始相角;i1th是基波电流的幅值;i(6n-1)th和i(6n+1)th是定子电流谐波的幅值;θ6n-1和θ6n+1是定子电流谐波的初始相角;ω为电角速度;将定子电流第6n-1次和第6n+1次谐波在d轴电流和q轴电流中变换为第6n次谐波;
8、s2:通过交叉解耦的陷波滤波器-二阶广义积分器分别提取d轴电流和q轴电流中的第6n次电流谐波与设定为零的指令值相减,通过pi控制器的闭环调节生成要注入的补偿电压值;
9、s3:将pi控制器闭环调节生成的补偿电压值注入到内置式永磁同步电机矢量控制电流内环中,与d轴电压和q轴电压相加。
10、可选的,步骤s1中,将d-q同步旋转坐标系下包含第6n次电流谐波的内置式永磁同步电机电流方程代入d-q同步旋转坐标系下内置式永磁同步电机的电压方程,得到包含第6n次电流谐波的内置式永磁同步电机电压方程。
11、可选的,步骤s1中,在d-q同步旋转坐标系下,忽略磁链谐波。
12、可选的,定子电流谐波为第5、7、11、13阶定子电流谐波;定子电流第5次和第7次谐波在d轴电流和q轴电流中变换为第6次谐波,定子电流第11次和第13次谐波在d轴电流和q轴电流中变换为第12次谐波。
13、可选的,电压补偿信号的值为:
14、
15、
16、其中,id6th和id12th分别为通过交叉解耦的陷波滤波器-二阶广义积分器提取d轴电流id的6次和12次电流谐波;iq6th和iq12th分别为通过交叉解耦的陷波滤波器-二阶广义积分器提取q轴电流iq的6次和12次电流谐波;kp2为d轴第6次电流谐波pi控制器的比例增益;ki2为d轴第6次电流谐波pi控制器的积分增益;kp3为d轴第12次电流谐波pi控制器的比例增益;ki3为d轴第12次电流谐波pi控制器的积分增益;kp4为q轴第6次电流谐波pi控制器的比例增益;ki4为q轴第6次电流谐波pi控制器的积分增益;kp5为q轴第12次电流谐波pi控制器的比例增益;ki5为q轴第12次电流谐波pi控制器的积分增益。
17、可选的,d轴电流环的开环传递函数为:
18、
19、其中,gpi1(s)是在d轴电流环中pi控制器的传递函数;gpi2(s)是第6次电流谐波pi控制器的传递函数;gpi3(s)是第12次电流谐波pi控制器的传递函数;kpwm是逆变器增益;tpwm是逆变器的开关周期。
20、可选的,内置式永磁同步电机的基波电流控制器与谐波电流控制单元独立运行。
21、可选的,步骤s3中,电压补偿信号与电流内环控制器输出的电压指令叠加后输入pwm调制模块。
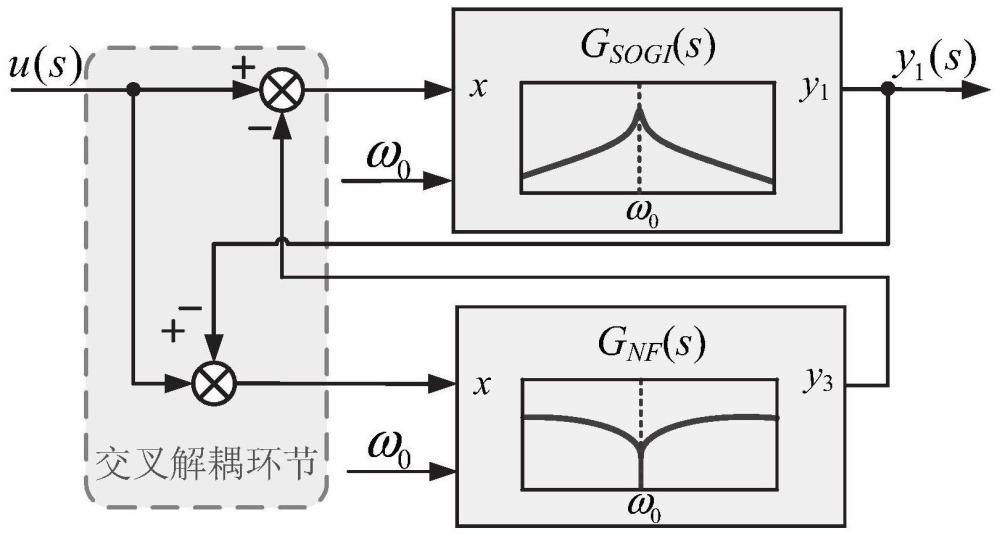
22、可选的,实施交叉解耦的陷波滤波器-二阶广义积分器的传递函数为:
23、
24、其中,ω0为被消除的频率;k为陷波滤波器的带宽;u(s)为输入信号;y1(s)是提取的输出;m为比例系数;s为复平面变量。
25、一种内置式永磁同步电机电流谐波抑制系统,包括:
26、第一计算模块,用于根据内置式永磁同步电机电流谐波模型,d-q同步旋转坐标系下,三相定子电流变换为d轴电流和q轴电流,包含电流谐波d轴和q轴的电流方程为:
27、
28、
29、其中,i1th是基波电流的幅值;θ1是基波电流的初始相角;i1th是基波电流的幅值;i(6n-1)th和i(6n+1)th是定子电流谐波的幅值;θ6n-1和θ6n+1是定子电流谐波的初始相角;ω为电角速度;将定子电流第6n-1次和第6n+1次谐波在d轴电流和q轴电流中变换为第6n次谐波;
30、交叉解耦的陷波滤波器-二阶广义积分器,用于分别提取d轴电流和q轴电流中的第6n次电流谐波;
31、第二计算模块,用于通过交叉解耦的陷波滤波器-二阶广义积分器分别提取d轴电流和q轴电流中的第6n次电流谐波与设定为零的指令值相减,通过pi控制器的闭环调节生成要注入的补偿电压值;
32、第三计算模块,用于将pi控制器闭环调节生成的补偿电压值注入到内置式永磁同步电机矢量控制电流内环中,与d轴电压和q轴电压相加。
33、与现有技术相比,本发明具有以下有益效果:
34、本发明采用交叉解耦的陷波滤波器-二阶广义积分器电流谐波提取方法对d轴电流id和q轴电流iq中的6n次电流谐波进行提取,避免了对传统二阶广义积分器结构进行改进,也不必考虑陷波滤波器的引入对系统稳定性造成的影响。
35、本发明中的交叉解耦的陷波滤波器-二阶广义积分器电流谐波提取方法既能保证谐波提取的快速动态响应,相对于传统二阶广义积分器电流谐波提取,交叉解耦的陷波滤波器-二阶广义积分器电流谐波提取方法又能提高电流谐波的提取精度。
36、本发明中的交叉解耦的陷波滤波器-二阶广义积分器电流谐波提取方法,设计思路简单明了,方法自身程序不复杂且易于编程实现。因此,能够将其搭载于现有成熟的数字信号处理器中正常运行,不用开发新的硬件平台,即可大大降低人力和经济成本,易于批量化生产。
37、本发明中的交叉解耦的陷波滤波器-二阶广义积分器电流谐波提取方法自身占用控制系统的资源很小,不会造成数字控制器内存不够用的情况,也不会引起明显的系统滞后。
38、本发明可以适用于内置式永磁同步电机矢量控制系统在不同转矩情况下的电流谐波抑制。
39、本发明中的通过pi控制器的闭环调节生成补偿电压,设计思路简单明了,pi参数调节简单,并具有动态过程中电流超调小、响应快速的能力。
40、本发明最后将计算得到的补偿电压叠加到参考电压中,从而抵消参考电压中的谐波分量,实现了电流谐波的抑制。基波电流控制器与谐波电流控制单元独立运行,控制目标值可以分别设置,相对于传统的电流内环控制器既要控制基波分量又要控制谐波分量来说,所提电流谐波抑制方法实现了电流基波和谐波分量的独立控制,控制精度更高。
本文地址:https://www.jishuxx.com/zhuanli/20240731/177473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表