一种晶圆自动上下料装置的制作方法
- 国知局
- 2024-07-31 18:56:39
本技术涉及自动上下料,特别是涉及一种晶圆自动上下料装置。
背景技术:
1、在半导体aoi测试生产过程中,晶圆一般存放于密封、洁净的晶圆盒中从而实现批量供料,测试过程中,需要将晶圆盒内的晶圆逐一取出以实现上料。现有技术中,cn110190013a公开了一种晶圆上料装置,该装置中,设置有带有能够传送晶圆盒的第一工位与第二工位,该装置只能用于一种规格的晶圆的上料作业,难以兼容不同规格晶圆的上料需求。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本实用新型提供一种能够兼容不同规格晶圆的上下料作业的晶圆自动上下料装置。
2、技术方案:为实现上述目的,本实用新型的晶圆自动上下料装置,其包括机架,所述机架上具有上料工位、搬运机械手以及寻边定位装置;
3、所述上料工位处设置有晶圆盒定位机构;所述晶圆盒定位机构上设置有多组定位组件,所述定位组件包括晶圆盒感应传感器,不同定位组件对应的所述晶圆盒感应传感器的位置不同;
4、所述搬运机械手包括升降模组、置于所述升降模组顶部的机械臂以及安装在所述机械臂末端的抓手;
5、所述寻边定位装置包括晶圆载台、光学寻边传感器以及读码器,所述晶圆载台能够做x轴、y轴的平移运动以及做旋转运动。
6、进一步地,每组所述定位组件包括对称设置的两个第一定位块与对称设置的两个第二定位块,两个所述第一定位块之间的距离为第一间距,两个所述第二定位块之间的距离为第二间距;不同定位组件对应的所述第一间接以及所述第二间距不同。
7、进一步地,所述上料工位具有两个所述晶圆盒定位机构。
8、进一步地,所述搬运机械手中,所述升降模组的顶部安装有两组所述机械臂,两组所述机械臂的末端均安装有所述抓手。
9、进一步地,所述抓手包括陶瓷牙叉,所述陶瓷牙叉上具有多个吸附气孔。
10、进一步地,所述机架上具有机罩,所述搬运机械手以及寻边定位装置置于机罩内,所述上料工位置于所述机罩外;所述机罩具有供所述抓手进出的作业窗口。
11、进一步地,所述作业窗口的上下边缘之间设置有安全光栅。
12、进一步地,所述机架还具有防护上翻门,所述防护上翻门的上边缘相对于所述机罩转动安装;所述防护上翻门能够将所述上料工位罩在其内。
13、有益效果:本实用新型的晶圆自动上下料装置,其通过设置带有多组定位组件的晶圆盒定位机构以及寻边定位机构,使得晶圆自动上下料装置对多种尺寸的晶圆具有很好的兼容性。上料时晶圆被搬运机械手抓取至寻边定位机构识别以及调节位姿后,再抓走,可以晶圆满足上料条件。下料时,晶圆经由寻边定位机构调整位姿后再由搬运机械手抓取至晶圆盒,可避免晶圆由于位置不准与晶圆盒碰撞损坏。
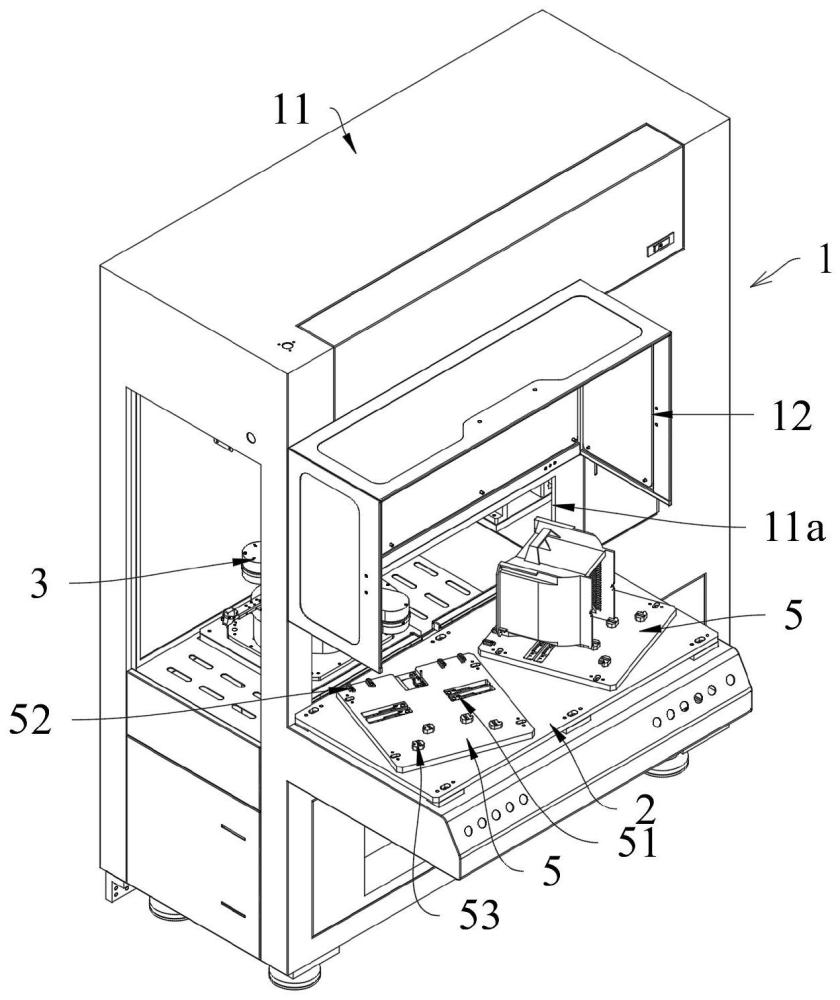
技术特征:1.一种晶圆自动上下料装置,其特征在于,其包括机架(1),所述机架(1)上具有上料工位(2)、搬运机械手(3)以及寻边定位装置(4);
2.根据权利要求1所述的晶圆自动上下料装置,其特征在于,每组所述定位组件包括对称设置的两个第一定位块(52)与对称设置的两个第二定位块(53),两个所述第一定位块(52)之间的距离为第一间距,两个所述第二定位块(53)之间的距离为第二间距;不同定位组件对应的所述第一间接以及所述第二间距不同。
3.根据权利要求1所述的晶圆自动上下料装置,其特征在于,所述上料工位(2)具有两个所述晶圆盒定位机构(5)。
4.根据权利要求1所述的晶圆自动上下料装置,其特征在于,所述搬运机械手(3)中,所述升降模组(31)的顶部安装有两组所述机械臂(32),两组所述机械臂(32)的末端均安装有所述抓手(33)。
5.根据权利要求1所述的晶圆自动上下料装置,其特征在于,所述抓手(33)包括陶瓷牙叉(33a),所述陶瓷牙叉(33a)上具有多个吸附气孔(33b)。
6.根据权利要求1所述的晶圆自动上下料装置,其特征在于,所述机架(1)上具有机罩(11),所述搬运机械手(3)以及寻边定位装置(4)置于机罩(11)内,所述上料工位(2)置于所述机罩(11)外;所述机罩(11)具有供所述抓手(33)进出的作业窗口(11a)。
7.根据权利要求6所述的晶圆自动上下料装置,其特征在于,所述作业窗口(11a)的上下边缘之间设置有安全光栅(6)。
8.根据权利要求6所述的晶圆自动上下料装置,其特征在于,所述机架(1)还具有防护上翻门(12),所述防护上翻门(12)的上边缘相对于所述机罩(11)转动安装;所述防护上翻门(12)能够将所述上料工位(2)罩在其内。
技术总结本技术公开了一种晶圆自动上下料装置,其包括机架,机架上具有上料工位、搬运机械手以及寻边定位装置;上料工位处设置有晶圆盒定位机构;晶圆盒定位机构上设置有多组定位组件,定位组件包括晶圆盒感应传感器,不同定位组件对应的晶圆盒感应传感器的位置不同;搬运机械手包括升降模组、置于升降模组顶部的机械臂以及安装在机械臂末端的抓手;寻边定位装置包括晶圆载台、光学寻边传感器以及读码器,晶圆载台能够做X轴、Y轴的平移运动以及做旋转运动。本技术中,通过设置带有多组定位组件的晶圆盒定位机构以及寻边定位机构,使得晶圆自动上下料装置对多种尺寸的晶圆具有很好的兼容性。技术研发人员:程胜,张建伟,徐东冬受保护的技术使用者:昆山瑞泰智能科技有限公司技术研发日:20231103技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/181057.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
图像传感器基板的制作方法
下一篇
返回列表