盘装置的制造方法以及程序与流程
- 国知局
- 2024-07-31 19:44:21
本发明的实施方式涉及盘装置的制造方法以及程序。
背景技术:
1、一般而言,在以硬盘装置为代表的盘装置中,组装有用于将例如磁头等头定位在作为记录介质的盘上的目标位置、即访问对象的磁道上的控制器(软件)。头在盘上的被定位的位置执行数据的读/写动作。
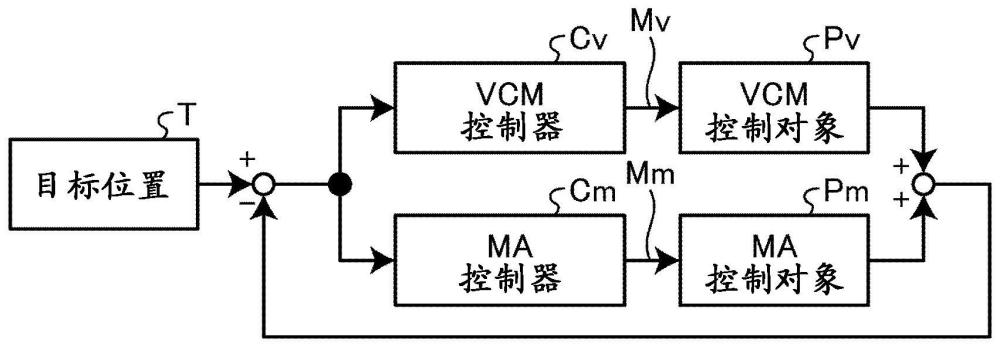
2、另外,近年来,在盘装置领域,正在进行所谓的两级致动器的研究开发,即,除了使在前端配置有头的臂移动的音圈马达(vcm:voice coil motor)之外,还通过设置在臂的前端的微致动器(ma:micro actuator)使头细微地移动。在该情况下,控制器分为vcm用控制器和ma用控制器。
3、另外,关于两级致动器的盘装置,也在进行以位置误差信号(pes:position errorsignal)的观测周期的n倍(n为2以上的整数)控制vcm和ma的多速率(multi rate)控制的研究开发。
4、然而,在现有技术中,在由两级致动器进行多速率控制的磁盘装置中,头的定位精度还不够,尚有改善的余地。
技术实现思路
1、本实施方式提供能够在由两级致动器进行多速率控制的盘装置中提高头的定位精度的盘装置的制造方法以及程序。
2、本实施方式涉及一种盘装置的制造方法,所述盘装置具备:盘,其存储数据;头,其相对于所述盘进行数据的读/写;第1致动器,其使前端配置有所述头的臂整体移动;第2致动器,其设置在所述臂的前端,使所述头移动;第1控制器,其以作为头位置观测周期的1/n周期(n为2以上的整数)的多速率,根据所述头的目标位置,控制所述第1致动器;第2控制器,其以所述1/n周期,根据所述头的目标位置,控制所述第2致动器;以及第1附加滤波器,其附加在所述第1控制器和所述第1致动器之间,根据来自所述第1控制器的输入数据,输出向所述第1致动器的输出数据,所述制造方法包括以下步骤:在附加所述第1附加滤波器之前的状态下,运算部对于所述第1致动器的操作量和所述第2致动器的操作量,分别以所述1/n周期施加测试信号而测定头位置误差谱和频率特性,基于所述频率特性计算多速率灵敏度特性,并基于所述头位置误差谱和多速率灵敏度特性,确定应该由所述第1附加滤波器校正的频率的步骤;和在分别附加了多个所述第1附加滤波器候选中的每个候选的状态下,关于所述频率,所述运算部对于所述第1致动器的操作量和所述第2致动器的操作量,分别以所述1/n周期施加测试信号而测定频率特性,基于所述频率特性计算多速率灵敏度特性,将所述多速率灵敏度特性的峰值在阈值以下且头位置误差最小的所述候选决定为要使用的所述第1附加滤波器的步骤。
技术特征:1.一种盘装置的制造方法,
2.一种盘装置的制造方法,
3.一种程序,是用于使制造盘装置所使用的计算机作为以下单元而发挥功能的程序,
4.一种程序,是用于使制造盘装置所使用的计算机作为以下单元而发挥功能的程序,
技术总结提供能够在由两级致动器进行多速率控制的盘装置中提高头的定位精度的盘装置的制造方法及程序。在实施方式中,在附加MA附加滤波器前的状态下,对于VCM的操作量和MA的操作量,分别以1/N周期施加测试信号而测定头位置误差谱和频率特性,基于频率特性计算多速率灵敏度特性,基于头位置误差谱和多速率灵敏度特性确定应该由MA附加滤波器校正的频率。另外,在分别附加了多个MA附加滤波器候选中的每个候选的状态下,关于频率,对于VCM的操作量和MA的操作量,分别以1/N周期施加测试信号而测定频率特性,基于频率特性计算多速率灵敏度特性,将多速率灵敏度特性的峰值在阈值以下且头位置误差最小的候选决定为要使用的MA附加滤波器。技术研发人员:岩代雅文受保护的技术使用者:株式会社 东芝技术研发日:技术公布日:2024/3/12本文地址:https://www.jishuxx.com/zhuanli/20240731/183779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表