一种基于车路协同的智慧交通控制系统的制作方法
- 国知局
- 2024-07-31 20:26:04
本发明涉及交通安全管理,具体为一种基于车路协同的智慧交通控制系统。
背景技术:
1、作为未来交通系统发展新方向,新型信息化智慧交通将计算机技术、数据通信技术、无线传感技术、自动控制技术等集成运用到交通系统的各个节点,形成综合感知、通信、决策和控制于一体的系统,有效促进交通管理方式的变革和治理能力的提升,进一步为交通参与者提供多样性的服务。新型信息化智慧交通致力于通过物联网、云计算、人工智能和大数据等技术在交通行业应用。
2、现有技术中,交通安全预警系统通过多种检测技术清楚还原路况,分析道路危险系数后,系统中的智能路端设备发出预警信号,提醒广大交通管理者和交通参与者及时掌握影响交通安全的各种信息情况。但当直行红绿灯进入倒计时后,后续机动车行驶到路口,若机动车驾驶员主观判断可以在倒计时剩余时间内通过路口,则不会减速甚至提速;而非机动车驾驶员普遍缺乏道路安全知识,道路安全意识薄弱,很多非机动车驾驶员会在绿灯亮起之前提前穿行马路,甚至不观察道路两侧的车辆行驶情况,这导致快速行驶过停止线的汽车和横向行驶的非机动车很可能会相撞,导致严重的交通事故。路口感知设备之间信息不互通、感知方式不互补,对路口环境安全的检测方式过于单一,无法与人的行动有机结合起来。因此,设计风险监测范围全面和行为预测能力强的一种基于车路协同的智慧交通控制系统是很有必要的。
技术实现思路
1、本发明的目的在于提供一种基于车路协同的智慧交通控制系统,以解决上述背景技术中提出的问题。
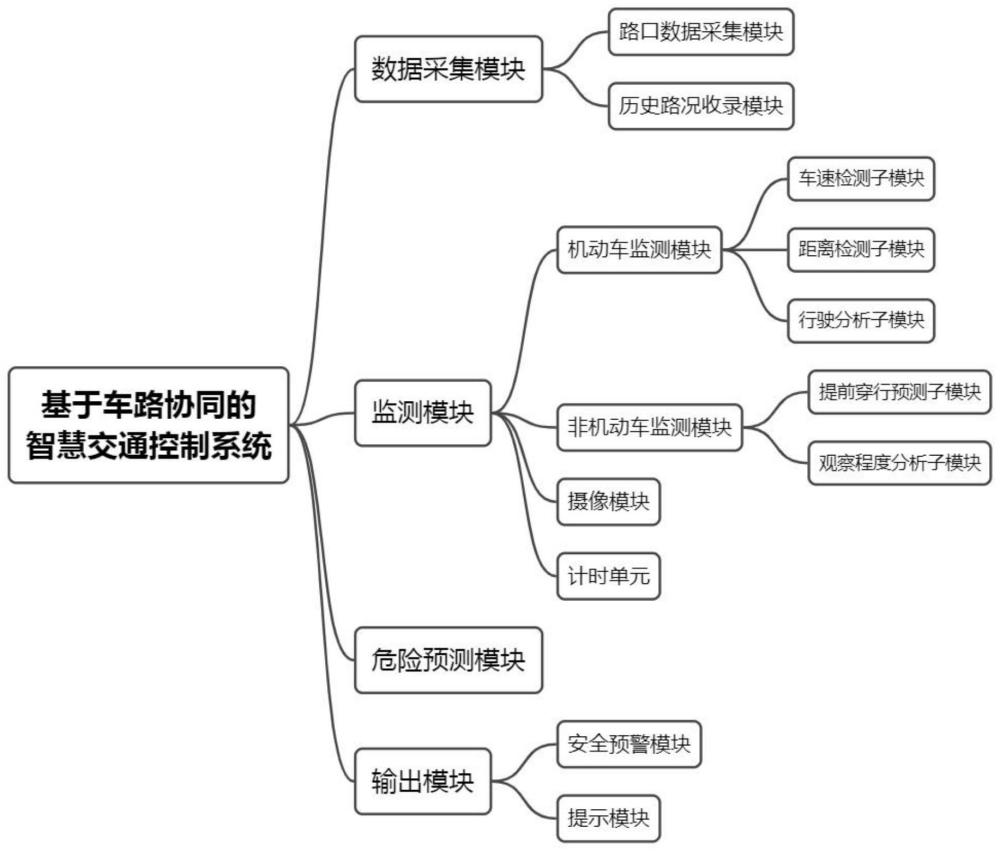
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于车路协同的智慧交通控制系统,包括数据采集模块、监测模块、危险预测模块和输出模块,所述数据采集模块用于收集交通路口的相关信息;所述监测模块用于对行驶到路口的机动车和非机动车驾驶员进行监测;所述危险预测模块用于通过所述监测模块获取机动车与非机动车发生危险事故的可能性;所述输出模块用于对所述危险预测模块预测的具有碰撞风险的机动车进行提醒。
3、根据上述技术方案,所述数据采集模块包括路口数据采集模块和历史路况收录模块,所述路口数据采集模块用于获取路口红绿灯以及警戒线的相关数据;所述历史路况收录模块用于筛选车流量大、发生事故风险率高的路口。
4、根据上述技术方案,所述监测模块包括机动车监测模块、非机动车监测模块、摄像模块和计时单元,所述机动车监测模块用于对机动车即将行驶到路口的时间段进行监测;所述非机动车监测模块用于对非机动车驾驶员在等待红绿灯期间是否有提前穿行马路的可能,并判断非机动车驾驶员是否能够观察到路口信息;所述摄像模块用于对路口的车辆进行拍摄,获取车辆以及驾驶员的画面信息;所述计时单元用于在监测时进行计时。
5、根据上述技术方案,所述机动车监测模块进一步包括车速检测子模块、距离检测子模块和行驶分析子模块,所述车速检测子模块用于检测车辆在路口后方的实时行驶速度;所述距离检测子模块用于检测车辆与路口的实时距离;所述行驶分析子模块用于判断车辆是否能在通行指示灯结束之前通过路口,所述非机动车监测模块包括提前穿行预测子模块和观察程度分析子模块,所述提前穿行预测子模块用于判断是否有可能提前穿行马路;所述观察程度分析子模块用于判断非机动车驾驶员是否充分观察了道路两侧的路况。
6、根据上述技术方案,所述输出模块包括安全预警模块和提示模块,安全预警模块用于将报警信息传输至附近交警身上的预警提示器;所述提示模块用于通过机动车的车载预警器提示机动车驾驶员及时减速。
7、根据上述技术方案,所述智慧交通控制系统的运行方法主要包括以下步骤:
8、步骤s1:当机动车经过路口后方底下设置的速度监测线时,机动车监测模块启动;
9、步骤s2:行驶分析子模块判断车辆是否能在通行指示灯结束之前通过路口,若判断机动车可以正常行驶通过路口但有碰撞风险,则通过非机动车监测模块对非机动车驾驶员进行监测;
10、步骤s3:非机动车监测模块通过提前穿行预测子模块判断非机动车驾驶员是否有可能提前穿行马路,若有可能,则启动观察程度分析子模块对非机动车驾驶员的注意力进行检测;
11、步骤s4:观察程度分析子模块对非机动车驾驶员的等待时间内的观察频率进行分析;
12、步骤s5:观察程度分析子模块通过摄像模块判断非机动车驾驶员是否充分观察道路两侧的路况;
13、步骤s6:若危险预测模块检测到有非机动车驾驶员提前穿行马路的可能且没有充分观察两边机动车车道情况,则判断有碰撞风险,通过安全预警模块将报警信息传输至附近交警身上的预警提示器并通过提示模块操控机动车的车载预警器提示机动车驾驶员及时减速。
14、根据上述技术方案,所述步骤s2进一步包括:
15、步骤s21:当汽车通过设置于路口后方50米的第一条速度监测线时,速度检测子模块获取车辆的速度为v1(km/h),若v1>40,则通过输出模块立刻提示车主减速;若v1<40,预测子模块获取红绿灯从绿灯转到红灯需要f秒,汽车以此速度行驶到达路口的时间到达对侧路口的时间其中l为监测横线到路口停止线的距离,h为路口停止线到对侧路口的距离,t1和t2的单位为秒;
16、步骤s22:若t1≥f,速度检测子模块在汽车通过设置于路口后方30米的第二条速度监测线时获取车辆的速度为v2,若v2≥ηv1,则通过输出模块立刻提示机动车驾驶员减速,其中η为驾驶车辆正常减速的最小阈值参数,0.9<η<1;
17、步骤s23:若机动车监测模块判断机动车可以正常行驶通过路口;
18、步骤s24:若机动车监测模块判断机动车可以正常行驶通过路口但有碰撞风险,危险预测模块启动,获取非机动车监测模块对道路两侧的非机动车驾驶员的监测结果,若有碰撞风险,则通过输出模块立刻提示机动车驾驶员减速。
19、根据上述技术方案,所述步骤s3进一步包括:
20、步骤s31:摄像模块通过设置于非机动车停车区正上方的摄像头拍摄非机动车驾驶员等待红绿灯的画面,通过数据库提取头盔的图像特征,根据驾驶员的头盔特征对焦非机动车驾驶员;提前穿行预测子模块以驾驶员头盔中心为原点,做一条穿过驾驶员头盔中心且与画面底部边线平行的直线为x轴,做一条穿过驾驶员头盔中心且与画面左侧边线的直线为y轴,建立平面直角坐标系,坐标系单位边长为1,驾驶员头盔中心的坐标为(0,0);
21、步骤s32:摄像模块通过驾驶员头盔中心的位置为参考的平面直角坐标系获取头盔前额中心点的位置(x,y);
22、步骤s33:摄像模块通过计时单元获取当前非机动车驾驶员等待红绿灯时间内n个时间点不同驾驶员头盔中心位置的头盔前额中心点实时位置(x1,y1)、(x2,y2)……(xn,yn),其中n个时间点的间隔都为t,并通过公式分别计算出每个时间点头盔前额中心点位置与y轴正半轴的偏移弧度值并将弧度角度值的绝对值按照从小到大排列|θ1|、|θ2|……|θn|,计算驾驶员头部总偏移弧度值m=θ1+θ2……θn,若m<λ(|θ1|+|θ2|……|θn|)且提前穿行预测子模块判断非机动车驾驶员有提前穿行马路的可能,其中λ为非机动车驾驶员观察一个方向的来车后小幅度向另一个方向摆头但未进行观察的误差指数,0.8<λ<1。
23、根据上述技术方案,所述步骤s4中,头盔前额中心点位置与y轴正半轴的偏移弧度标准差若观察程度分析子模块判断非机动车驾驶员头部偏移无法直接观察到车辆,通过摄像模块对非机动车驾驶员的眼部观察情况进行检测,进一步判断非机动车驾驶员是否充分观察来往车辆;若观察程度分析子模块判断非机动车驾驶员充分观察到来往车辆。
24、根据上述技术方案,所述步骤s5进一步包括:
25、步骤s51:摄像模块通过设置于非机动车停车区对侧绿化带的摄像头持续拍摄非机动车驾驶员等待红绿灯的画面,根据驾驶员的眼部特征对焦驾驶员左眼,并获取眼部放大画面;非机动车监测模块获取眼部放大画面后,以第一画面信息标定当前左眼眼球、内眼角和外眼角的位置,并以左眼眼球聚合中心点为原点,内眼角至外眼角线段为x轴,x轴旋转90度为y轴,建立平面直角坐标系,坐标系单位边长为1,当前左眼眼球聚合中心点位置为(0,0);
26、步骤s52:摄像模块持续不断获取左眼眼球聚合中心点位置,并与第一画面信息实时缩放比对后,得到眼球聚合中心点位置(x,y);
27、步骤s53:观察程度分析子模块获取头盔前额中心点位置与y轴正半轴的偏移弧度值高于时非机动车驾驶员左眼聚集实时位置(x11,y11)、(x21,y21)……(xi1,yi1),并通过公式分别计算出每个时间段眼球位置与第一画面信息标定的左眼眼球位置的偏移距离值γ11、γ21……γi1,计算驾驶员眼部总偏移角度若则判断非机动车驾驶员通过眼睛观察到道路右侧车辆情况,否则通过输出模块将降速信息传输至向左行驶的机动车驾驶员;
28、步骤s54:观察程度分析子模块获取头盔前额中心点位置与y轴正半轴的偏移角度值的高于30°时非机动车驾驶员左眼聚集实时位置(x21,y21)、(x22,y22)……(xi2,yi2),其中i1+i2<n,并分别计算出每个时间段眼球位置与第一画面信息标定的左眼眼球位置的偏移距离值γ21、γ22……γi2,计算驾驶员眼部总偏移角度若则判断非机动车驾驶员通过眼睛观察到道路左侧情况,否则通过输出模块将降速信息传输至向右行驶的机动车驾驶员。
29、与现有技术相比,本发明所达到的有益效果是:本发明,通过机动车监测模块判断机动车在路口是否能够正常驶过路口,在机动车在红灯之前急驶过路口的情况下,非机动车监测模块对有可能提前穿行的非机动车进行分析,获取非机动车驾驶员是否在提前穿行时对道路两侧的车辆进行观察,并通过危险预测模块预测发生交通事故的可能性,通过对发生事故可能性最大的场景进行实时预测,最大程度上降低了机动车与非机动车相撞的可能性,提高了交通十字路口的安全性,加强了交通安全管理。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186183.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表