一种固定险情下基于多模态通信的无人船避险系统及方法
- 国知局
- 2024-07-31 20:26:05
本发明涉及水面机器人控制领域以及通信网络,具体而言,尤其涉及一种固定险情下基于多模态通信的无人船避险系统及方法。
背景技术:
1、随着自主控制技术和计算机科学的发展,工业、农业、军事、交通等各个领域的自动化程度不断提高。具有一定自主控制能力的无人船得到了广泛应用,其可在海洋、湖泊、港口等环境中进行自主巡航,完成目标检测、环境感知等多项任务。无人船主要应用于水质检测、水文测量、环卫保洁、海洋调查、生物探测、军事应用等领域。由于海域地理情况的复杂程度未知,无人船能否安全航行是无人船正常作业的基础。无论无人船遭遇险情信息已知的固定位置险情或者险情信息部分未知或完全未知的突发险情,都需要无人船通信网络的支持。目前一种基于多模态网络的无人船通信技术得到了应用,其可支持向某个范围或位置的无人船准确地传输信息,大幅度提升无人船通信网络的灵活性、可靠性。
2、虽然多模态网络的功能强大,传输灵活,但是基于多模态网络的无人船通信技术目前尚未与无人船具体的场景业务进行应用层面的适配,无法发挥多模态网络的众多优势。于是考虑无人船具体场景中的业务需求,以及无人船水面作业的控制特性,和多模态网络的传输机制,进行与无人船水面作业场景需求相适应的基于多模态网络通信的无人船控制技术的开发是很有必要的。
技术实现思路
1、根据上述提出的技术问题,本发明考虑无人船面临固定险情场景中的业务需求和控制特性,并结合多模态网络的传输机制,提出了一种固定险情下基于多模态通信的无人船避险系统及方法,适配无人船多模态通信技术,基于该技术设计无人船多模态通信机制触发的避险方法,通过增加无人船对多模态通信信息的触发反应机制,实时规划无人船避险路径并进行路径追踪,实现无人船面临固定险情时的进行灵活的通信避险。
2、本发明采用的技术手段如下:
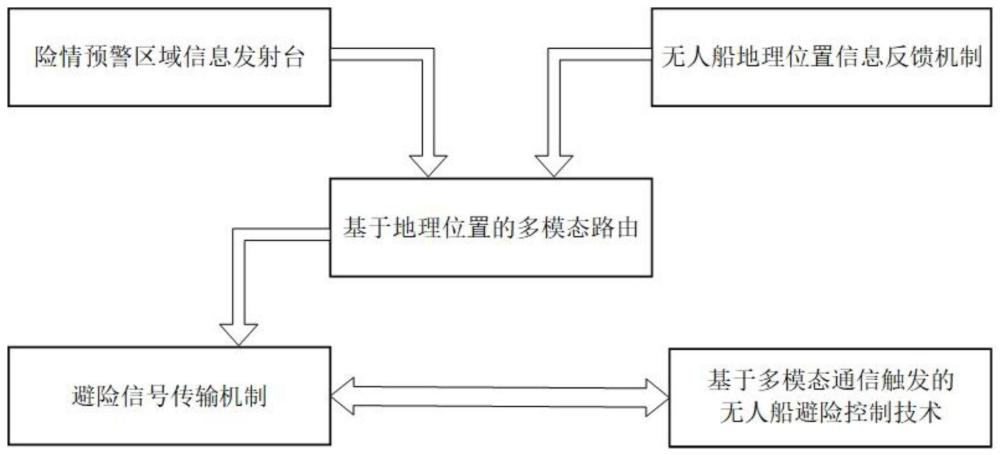
3、一种固定险情下基于多模态通信的无人船避险系统,包括:险情预警区域信息发射台、无人船地理位置信息反馈机制单元、基于地理位置的多模态路由、避险信号传输机制单元以及基于多模态通信触发的无人船避险控制单元,其中:
4、所述险情预警区域信息发射台,连接所述基于地理位置的多模态路由,用于接收相应的预警区域信息,并将接收到的信息进行打包发送至所述基于地理位置的多模态路由;
5、所述无人船地理位置信息反馈机制单元,连接所述基于地理位置的多模态路由,用于无人船读取船上定位设备信息,得到无人船的位置经纬度,再进行打包发送给多模态路由器,为多模态路由器的基于地理位置路由功能提供无人船的位置信息;
6、所述基于地理位置的多模态路由,用于传输基于地理位置标识的信息和基于tcp/ip协议的信息;
7、所述避险信号传输机制单元,连接所述基于地理位置的多模态路由,用于根据多模态路由传输的两种信息进行区域广播;
8、所述基于多模态通信触发的无人船避险控制单元,连接所述避险信号传输机制单元,用于根据避险信号传输机制单元传输的多模态路由机制传输信息进行实时触发,对无人船运动模式进行灵活控制。
9、进一步地,所述险情预警区域信息发射台包括预警区域信息配置模块、信息打包模块和信息发送模块,其中:
10、所述预警区域信息配置模块,用于接收输入的预警区域信息,包括经纬度以及半径;
11、所述信息打包模块,用于根据多模态网络协议对输入的预警信息进行再打包,形成多模态网络中能根据目的端位置进行路由的信息;
12、所述信息发送模块,用于通过链路层向多模态路由器传输以上包装好的预警区域信息。
13、进一步地,所述无人船地理位置信息反馈机制单元包括无人船定位信息读取模块、定位信息打包模块和定位信息发送模块,其中:
14、所述无人船定位信息读取模块,用于访问无人船定位设备,并周期性读取相应的定位信息,包括无人船的地理经纬度;
15、所述定位信息打包模块,用于根据多模态网络协议对输入的预警信息进行再打包,形成多模态网络能解析解读的信息;
16、所述定位信息发送模块,用于通过链路层向多模态路由器传输以上包装好的定位信息。
17、进一步地,所述基于地理位置的多模态路由包括基于地理位置标识的路由传输模块和基于tcp/ip协议的路由传输模块,其中:
18、所述基于地理位置标识的路由传输模块,用于传输根据无人船的地理位置信息,判断无人船是否进入预警区域,若无人船进入预警区域,则对无人船进行预警信息转发,若无人船未进入预警区域,则传输相应的执行预设任务的信号;
19、所述基于tcp/ip协议的路由传输模块,用于传输无人船相应的与地面站的互动信息,保持对无人船的状态监控,轨迹显示和无人船控制安全保护。
20、进一步地,所述避险信号传输机制单元包括地理位置标识信息协议格式、tcp/ip协议信息协议格式,其中:
21、所述地理位置标识信息协议格式,设计为一个标志位报头与预警区域经纬度、半径以及无人船当前位置的组合;
22、所述tcp/ip协议信息协议格式,设计为仅有一个标志位的标志信息。
23、进一步地,所述基于多模态通信触发的无人船避险控制单元包括信息接收模块、信息解析模块和无人船控制模块,其中:
24、所述信息接收模块,用于通过端口监听,接收多模态信号;
25、所述信息解析模块,用于对接收的多模态信号进行解码解析,读取标志位的标识,识别信息类型;
26、所述无人船控制模块,用于根据信息解析模块的识别结果控制无人船运动模式,若识别结果是预设任务信号,则保持当前的控制方式,执行原本的预设任务;若识别结果是预警信息,则根据预警区域的经纬度、半径以及无人船当前位置计算避险路径以及避险起点,使无人船驶出预警区域,并按照避险路径进行避险,完成避险任务,避险完成后接收到执行预设任务的信号,继续完成原本任务。
27、进一步地,所述无人船控制模块采用的避险方式包括设计避险路径规划和避险起点,其中:
28、设计避险路径规划:根据接收到的避险区域信息,包括避险区域中心位置及避险区域范围,规划避险路径,同时考虑无人船运动特性,设计合理的避险路径以及避险起点;
29、设计避险起点:对于得到的避险路径及避险起点,无人船首先追踪避险起点到达避险路径之上,然后追踪避险路径完成避险。
30、本发明还提供了一种基于上述固定险情下基于多模态通信的无人船避险系统实现的无人船避险方法,包括:
31、s1、基于多模态无人船的通信技术,构建发送固定险情下的险情区域信息的险情信息发射台,发送固定险情的区域信息;
32、s2、无人船地理位置信息反馈机制通过访问无人船上装载的定位装置,获取无人船的位置信息,在经由信息包装模块和信息发送模块反馈给多模态路由器,为多模态路由器的基于地理位置路由功能提供无人船的位置信息;
33、s3、多模态路由器接收无人船的位置信息以及险情区域信息,并对无人船位置进行判断,判断无人船位置是否符合险情区域信息所要求的转发条件,转发条件为无人船位于预警区域内;
34、s4、多模态路由器根据无人船位置判断结果,对位于固定险情预警区域内的无人船进行预警区域信息的广播,而对未进入险情预警区域的无人船则广播执行预设任务的信息;
35、s5、无人船根据多模态协议对接收到的数据包进行解包,获得相应的控制信息,根据接收到的控制信息进行控制,在无人船接收到继续执行预设任务的信息时不改变控制策略,继续执行预设任务;当无人船接收到险情区域信息时,则根据险情区域信息改变控制策略,对固定险情区域进行避险;
36、s6、基于多模态通信信息进行实时触发,实时规划避险路径,并考虑无人船的停船冲程和最小转弯半径设计无人船避险路径。
37、进一步地,所述步骤s6,具体包括:
38、s61、在保障无人船安全的前提下,根据避险区域中心位置以及半径,并考虑无人船停船冲程和最小转弯半径因素,为无人船预留出停船距离,计算相应的险情预警范围半径,如下:
39、rw=r+rt+rs
40、其中,rw为险情预警半径,r为险情区域半径,rt为无人船最小转弯半径,rs为无人船停船距离;
41、s62、在预警区域中划定无人船停船区域半径,如下:
42、rs=r+rs
43、其中,rs为停船区域半径,在该半径范围内无人船将立即停船;
44、s63、无人船根据转弯半径和停船距离,设计无人船的避险路径,如下:
45、
46、其中,ra表示避险路径半径,xlat表示避险路径的纬度坐标,ylon表示避险路径的经度坐标,lon和lat表示险情区域中心经纬度坐标
47、s64、根据步骤s63设计的无人船的避险路径,设计无人船避险起始位置,如下:
48、
49、其中,xst和yst分别表示无人船避险起始位置的纬度坐标和经度坐标。
50、较现有技术相比,本发明具有以下优点:
51、1、本发明考虑无人船面临固定险情场景中的业务需求,并结合多模态网络的传输机制,提出了一种固定险情下基于多模态通信的无人船避险技术,在多模态网络针对目标区域广播的功能基础上,增加向固定险情区域附近的预警区域广播险情的经纬度以及半径的功能。
52、2、本发明结合无人船的控制特性,以及多模态网络对预警区域广播的险情区域信息功能,设计了基于多模态网络通信的避险触发机制,在无人船巡航功能的基础上增加了实时的避险路径规划和避险路径跟踪功能,以上功能基于对多模态网络传输的信息的解析识别,依据对信息的标识位的辨识以及具体信息内容,执行该信息指定的巡航任务以及实时避险路径规划及跟踪人物,提高无人船在海上避险的安全性、可靠性以及灵活性。
53、基于上述理由本发明可在水面机器人控制领域以及通信网络等领域广泛推广。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表