一种路径预测方法及系统
- 国知局
- 2024-07-31 20:27:45
本发明涉及路径预测领域,具体涉及一种路径预测方法及系统。
背景技术:
1、路径预测是指通过移动对象的一系列历史路径和交通信号灯的状态,预测移动对象在未来一段时间内的移动路径。其在机器人移动导航、智慧交通系统、辅助驾驶系统、自动驾驶系统中有着广泛的应用。
2、交通路口是交通系统中最常见且最重要的交通场景之一。大量的交通事故均发生在交通路口场景,准确地预测交通路口场景中移动对象的未来路径,可极大程度地避免交通事故的发生。然而,相比其它道路场景,交通路口场景具有高度复杂性。首先,交通信号灯的状态显著影响移动对象的移动动作。其次,交通路口场景中不同的移动动作存在显著差异,如停止与转向等动作。现有的路径预测模型难以利用交通信号灯的状态并描述不同移动动作存在的显著差异,影响了路径预测准确性。
技术实现思路
1、为解决上述背景中的技术问题,本发明旨在提供一种路径预测方法及系统。可以有效描述不同移动动作存在的显著差异,从而提升路径预测准确性。
2、为实现上述目的,本发明提供了一种路径预测方法,步骤包括:
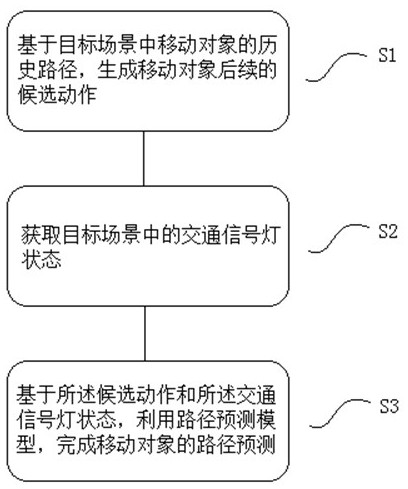
3、基于目标场景中移动对象的历史路径,生成移动对象后续的候选动作,所述候选动作包括:左转向动作、右转向动作、直行动作和停止动作;
4、获取目标场景中的交通信号灯状态;
5、基于所述候选动作和所述交通信号灯状态,利用路径预测模型,完成移动对象的路径预测。
6、优选的,生成所述候选动作的方法包括:
7、获取移动对象的历史路径 l past= [ l1, l2,..., l a-1, l a],其中所述历史路径包括 a个观察时刻的位置坐标;
8、基于所述历史路径,生成所述候选动作,包括:
9、,
10、,
11、其中, l stop表示停止动作,包含 a个观察时刻的位置坐标 l a; l straight表示直行动作,且,当时,对应有,...,。
12、,
13、,
14、其中,。当 i= 1, 2,..., a-1, a,对应地, l left和 l right分别表示候选左转向动作和候选右转向动作:
15、,
16、。
17、优选的,所述路径预测模型包括:全连接层、门控循环单元、卷积层和t分布函数;训练所述路径预测模型的方法包括:
18、基于交通信号灯状态,训练所述全连接层和所述门控循环单元预测所述候选动作中各项动作出现的概率;
19、基于移动对象的候选动作中各项动作出现的概率,使用所述卷积层和所述全连接层,对所述候选动作的t分布函数参数进行训练,得到所述路径预测模型。
20、优选的,移动对象各项动作出现的概率 p通过如下公式表示:
21、,
22、其中,mlp表示任意层数的全连接层,softmax函数对mlp输出的结果进行归一化操作; c stop、 c straight、 c left、 c right分别表示移动对象执行停止动作、直行动作、左转向动作和右转向动作的概率; act为特征向量。
23、优选的,当交通信号灯为绿色时或场景中不存在交通信号灯时, act通过如下公式表示:
24、,
25、其中,gru表示门控循环单元; a stop、 a straight、 a left、 a right分别表示停止动作、直行动作、左转向动作和右转向动作与历史路径之间相关程度的特征向量,通过如下公式表示:
26、,
27、,
28、,
29、,
30、其中, l past表示历史路径; w1、 w2和 w3表示模型可学习的参数;
31、当交通信号灯为红色或黄色时, act通过如下公式表示:
32、,
33、其中,o straight和o left表示零向量;o straight的向量维度等于 a straight的向量维度,o left的向量维度等于 a left的向量维度。
34、本发明还提供了一种路径预测系统,所述系统用于实现上述方法,包括:生成模块、获取模块和预测模块;
35、所述生成模块用于基于目标场景中移动对象的历史路径,生成移动对象后续的候选动作,所述候选动作包括:左转向动作、右转向动作、直行动作和停止动作;
36、所述获取模块用于获取目标场景中的交通信号灯状态;
37、所述预测模块用于基于所述候选动作和所述交通信号灯状态,利用路径预测模型,完成移动对象的路径预测。
38、优选的,所述生成模块的工作流程包括:
39、获取移动对象的历史路径 l past= [ l1, l2,..., l a-1, l a],其中所述历史路径包括 a个观察时刻的位置坐标;
40、基于所述历史路径,生成所述候选动作,包括:
41、,
42、,
43、其中, l stop表示停止动作,包含 a个观察时刻的位置坐标 l a; l straight表示直行动作,且,当时,对应有,...,。
44、,
45、,
46、其中,。当 i= 1, 2,..., a-1, a,对应地, l left和 l right分别表示候选左转向动作和候选右转向动作:
47、,
48、。
49、优选的,所述路径预测模型包括:全连接层、门控循环单元、卷积层和t分布函数;训练所述路径预测模型的方法包括:
50、基于交通信号灯状态,训练所述全连接层和所述门控循环单元预测所述候选动作中各项动作出现的概率;
51、基于移动对象的候选动作中各项动作出现的概率,使用所述卷积层和所述全连接层,对所述候选动作的t分布函数参数进行训练,得到所述路径预测模型。
52、优选的,移动对象各项动作出现的概率 p通过如下公式表示:
53、,
54、其中,mlp表示任意层数的全连接层,softmax函数对mlp输出的结果进行归一化操作; c stop、 c straight、 c left、 c right分别表示移动对象执行停止动作、直行动作、左转向动作和右转向动作的概率; act为特征向量。
55、优选的,当交通信号灯为绿色时或场景中不存在交通信号灯时, act通过如下公式表示:
56、,
57、其中,gru表示门控循环单元; a stop、 a straight、 a left、 a right分别表示停止动作、直行动作、左转向动作和右转向动作与历史路径之间相关程度的特征向量,通过如下公式表示:
58、,
59、,
60、,
61、,
62、其中, l past表示历史路径; w1、 w2和 w3表示模型可学习的参数;
63、当交通信号灯为红色或黄色时, act通过如下公式表示:
64、,
65、其中,o straight和o left表示零向量;o straight的向量维度等于 a straight的向量维度,o left的向量维度等于 a left的向量维度。
66、与现有技术相比,本发明的有益效果如下:
67、本发明可以高效表达不同交通信号灯状态下移动对象的未来路径,使得其预测结果更加贴近真实路径,提高预测结果的准确性。同时,本发明只需要使用历史路径信息,不需要使用额外的图片信息,有较高的计算效率,可有效地降低软硬件采购成本。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186309.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表