一种基于振动传感器的飞行器监测方法及装置
- 国知局
- 2024-07-31 20:28:08
本发明涉及飞行器飞行状态监测,尤其涉及一种基于振动传感器的飞行器监测方法及装置。
背景技术:
1、现有技术中,一般通过雷达监测或者“自动相关监视-广播(ads-b)”的方式监测飞行器的飞行状态如飞行轨迹、飞行速率和相对于地面具体地点的距离等等。但是雷达监测法对于低空飞行的飞机,以及隐身飞机等可能存在监测盲区;而ads-b飞行跟踪系统的原理基于飞机主动以特定频段持续对外广播其身份、高度、速度、坐标等飞信参数,本质上是一种被动监测。如果要针对飞行器进行主动监测,则雷达检测法和ads-b飞行跟踪系统的放置地点都会受限,且无法监测低空飞行或隐身飞行的飞行器,导致应用场景狭窄。
2、在地震学领域,在全球广泛设置有地震仪等振动传感器,通过地震仪观测台阵中的振动传感器可以记录到各种地面运动信号,包括地震事件、风和植被建筑等的相互作用、道路轨道交通、以及空气和地表耦合产生的信号。然而,在传统的地震研究中,往往忽略了空中交通事件对地震波形的影响,也没有针对空中交通事件与振动波信号的关系的研究,导致振动传感器无法很好地应用于飞行器的监测领域。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种基于振动传感器的飞行器监测方法,以解决现有技术中振动传感器无法应用于飞行器监测领域,导致对于飞行器的监测受到场景限制的问题。
2、本发明的技术方案如下:
3、本发明第一方面公开了一种基于振动传感器的飞行器监测方法,其中,所述方法包括:
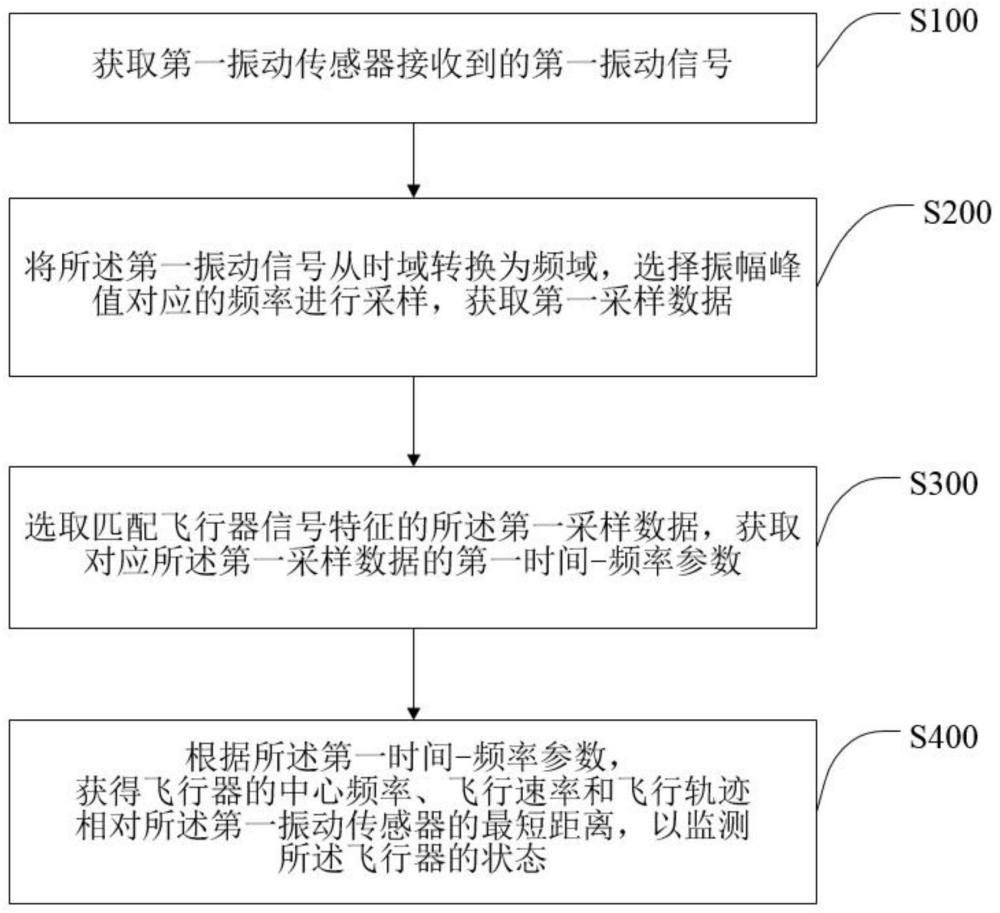
4、获取第一振动传感器接收到的第一振动信号;
5、将所述第一振动信号从时域转换为频域,选择振幅峰值对应的频率进行采样,获取第一采样数据;
6、选取匹配飞行器信号特征的所述第一采样数据,获取对应所述第一采样数据的第一时间-频率参数,其中所述飞行器信号特征包括按时序相连的第一信号、第二信号和第三信号,所述第一信号对应的第一频率大于所述第三信号对应的第三频率,所述第二信号对应的第二频率逐渐减少以平滑连接所述第一信号和所述第二信号,且所述飞行器信号特征的长度大于100秒;
7、根据所述第一时间-频率参数,获得飞行器的中心频率、飞行速率和飞行轨迹相对所述第一振动传感器的最短距离,以监测所述飞行器的状态。
8、在一种实施方式中,所述根据所述第一时间-频率参数,获得飞行器的中心频率、飞行速率和飞行轨迹相对所述第一振动传感器的最短距离,以监测所述飞行器的状态,包括:
9、针对所述飞行器的所述中心频率、所述飞行速率、所述飞行轨迹相对所述第一振动传感器的最短距离和所述飞行器发出所述第一振动信号的时间,确定飞行器状态模型;
10、根据多普勒效应原理,确定所述第一振动传感器对于所述第一振动信号的接收频率与观测频率的关系;
11、基于所述接收频率与所述观测频率的关系,根据所述第一时间-频率参数,迭代所述飞行器状态模型,获得所述飞行器的所述中心频率、所述飞行速率和所述飞行轨迹相对所述第一振动传感器的最短距离,以监测所述飞行器的状态。
12、在一种实施方式中,所述方法还包括:
13、获取第二振动传感器接收到的第二振动信号;
14、根据所述第二振动信号获取第二采样数据,选取匹配飞行器信号特征的所述第二采样数据,获取对应所述第二采样数据的第二时间-频率参数;
15、基于所述第一时间-频率参数、所述第二时间-频率参数以及所述第一振动传感器与所述第二振动传感器的位置关系,获取所述飞行器的飞行轨迹方向。
16、在一种实施方式中,所述基于所述第一时间-频率参数、所述第二时间-频率参数以及所述第一振动传感器与所述第二振动传感器的位置关系,获取所述飞行器的飞行轨迹方向,包括:
17、基于所述第一时间-频率参数和所述第二时间-频率参数,获取所述第一振动传感器和所述第二振动传感器接收同一振动信号的时间差;
18、根据所述时间差、所述飞行速率以及所述第一振动传感器与所述第二振动传感器的位置关系,获取所述飞行器的所述飞行轨迹方向。
19、在一种实施方式中,所述方法还包括:
20、获取第三振动传感器接收到的第三振动信号;
21、根据所述第三振动信号获取第三采样数据,选取匹配飞行器信号特征的所述第三采样数据,获取对应所述第三采样数据的第三时间-频率参数;
22、基于所述第二时间-频率参数,获取飞行轨迹相对所述第二振动传感器的最短距离,基于所述第三时间-频率参数,获取飞行轨迹相对所述第三振动传感器的最短距离;
23、根据所述飞行轨迹相对所述第一振动传感器的最短距离、所述飞行轨迹相对所述第二振动传感器的最短距离、所述飞行轨迹相对所述第三振动传感器的最短距离以及所述飞行轨迹方向,获取所述飞行器的飞行高度。
24、在一种实施方式中,所述第一振动传感器、所述第二振动传感器和所述第三振动传感器均为多个子传感器组成的传感器阵列,且所述传感器阵列中相邻所述子传感器之间的间距小于所述第一振动信号、所述第二振动信号和所述第三振动信号的波长。
25、在一种实施方式中,所述方法还包括:
26、平移叠加所述传感器阵列接收到的多个振动信号,获取叠加后最强的波列信号对应的时间差;
27、基于所述时间差和所述传感器阵列中相邻所述子传感器之间的间距,获取所述飞行器的方位角和仰角。
28、在一种实施方式中,所述方法还包括:
29、在时间-频率图上拟合所述第一采样数据,获取拟合图像中符合所述飞行器信号特征的特征数量;
30、当所述特征数量为0时,判定无飞行器飞过;
31、当所述特征数量为1时,判定所述飞行器为飞机;
32、当所述特征数量大于1时,判定所述飞行器为直升机。
33、本发明第二方面提供了一种基于振动传感器的飞行器监测装置,其中,包括:
34、信号获取模块,用于获取第一振动传感器接收到的第一振动信号;
35、信号采样模块,用于将所述第一振动信号从时域转换为频域,选择振幅峰值对应的频率进行采样,获取第一采样数据;
36、信号处理模块,用于选取匹配飞行器信号特征的所述第一采样数据,获取对应所述第一采样数据的第一时间-频率参数,其中所述飞行器信号特征包括按时序相连的第一信号、第二信号和第三信号,所述第一信号对应的第一频率大于所述第三信号对应的第三频率,所述第二信号对应的第二频率逐渐减少以平滑连接所述第一信号和所述第二信号,且所述飞行器信号特征的长度大于100秒;
37、飞行器状态监测模块,用于根据所述第一时间-频率参数,获得飞行器的中心频率、飞行速率和飞行轨迹相对所述第一振动传感器的最短距离,以监测所述飞行器的状态。
38、本发明第三方面还提供了一种智能终端,其中,所述智能终端包括存储器和一个以上的处理器;所述存储器存储有一个以上的程序;所述处理器运行所述程序时,执行如上任一所述的基于振动传感器的飞行器监测方法。
39、综上所述,本发明公开了一种基于振动传感器的飞行器监测方法及装置,所述方法通过将振动传感器接收到的振动信号从时域转换到频域,选择振幅峰值对应的频率进行采样获取采样数据,再选取匹配飞行器信号特征的采样数据获取所述振动信号的时间-频率参数,通过所述时间-频率参数获得飞行器的中心频率、飞行速率和飞行轨迹相对所述振动传感器的最短距离,以监测所述飞行器的状态。本发明通过确定对应空中交通事件的飞行器信号特征,从振动传感器接收到的振动信号中筛选匹配对应的信号数据,从而准确地监测和量化飞行器的中心频率、飞行速率和飞行轨迹相对所述振动传感器的最短距离,从而实现对飞行器的飞行状态的实时监测。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186336.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表