基于速度误差的物流无人机安全放行间隔标定方法
- 国知局
- 2024-07-31 20:28:10
本发明涉及无人机飞行安全,具体为基于速度误差的物流无人机安全放行间隔标定方法。
背景技术:
1、当物流无人机运行量足够高时,放行间隔是组织中必须考虑的问题。从安全角度,其主要需要考虑的问题可以分为两个方面,其一即多架无人机按照同一航线飞行时,飞行中后机会不会追上前机导致碰撞;其二是如果存在同高度交叉航线,无人机会不会在航线交叉点碰撞的问题。前者需要控制在起飞点的放行间隔,后者则需要协同控制两个起飞点的放行间隔。
2、这两种间隔管理的核心在于对无人机运行纵向航迹的时刻控制,如果所有无人机的运行航迹均能按照预定时刻做到精确控制,那么这些间隔管理便成为一个十分简单的问题。然而,在无人机控制系统、质量等诸多因素影响下,其运行速度很难被精确控制,导致无人机的实际位置与预定位置存在一定的差距,进而导致了纵向航迹的不确定性,也使得放行间隔管理变得复杂化,速度的不稳定性也成为了分析放行安全性的关键。
3、为此,本次研究以无人机速度不稳定性为切入点,针对同航线和交叉航线两种情景下的放行管理安全问题进行分析,提出基于速度误差的物流无人机安全放行间隔标定方法。
技术实现思路
1、为了解决上述技术问题,本发明提供了如下的技术方案:
2、本发明提供基于速度误差的物流无人机安全放行间隔标定方法,包括以下步骤:
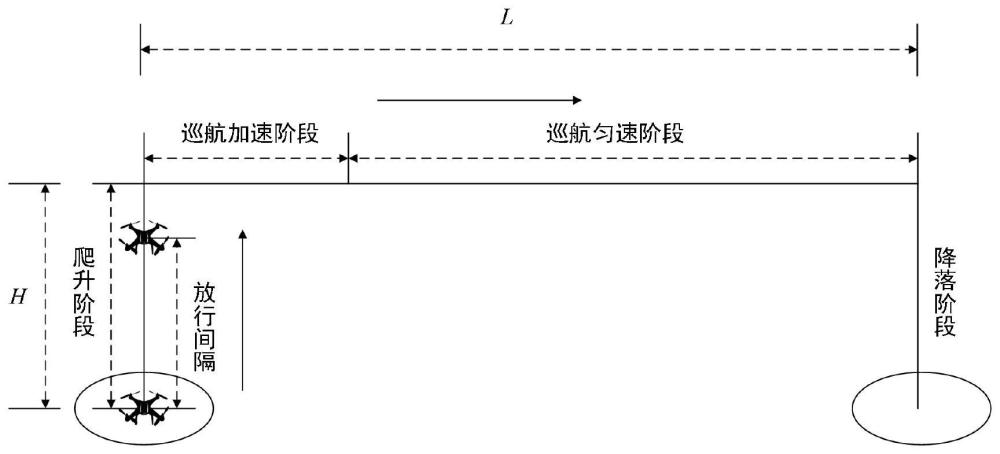
3、s1:安全放行关键影响因素分析,无人机飞行过程主要经历四个阶段:爬升阶段、巡航加速阶段、巡航匀速阶段和减速降落阶段;
4、在同航线运行的问题中,减速降落阶段通过现有的指令控制、视觉检测等方式避免占用着陆点,在爬升阶段、巡航加速阶段、巡航匀速阶段出现后机追上前机而碰撞的问题,主要影响因素有无人机爬升阶段的垂直方向、巡航加速阶段和巡航匀速阶段水平方向的速度不稳定性、起飞放行间隔以及无人机大小等,通过采取追赶碰撞研究来分析在特定无人机速度和大小属性下放行间隔与碰撞风险的关系;
5、在交叉航线问题中,无人机可能的碰撞主要发生在各无人机路线的交叉点处;此处的碰撞主要与无人机的运行速度不稳定性、两个航线起飞点与交叉点的距离、无人机的大小以及两起飞点的放行间隔等因素有关,以90°交叉航线为对象,分析在特定无人机速度和大小属性下两起飞点与交叉点距离、放行间隔两种要素与碰撞风险的关系。
6、s2:确定安全目标水平与放行间隔,设定可接受的最低放行碰撞概率水平;根据运行区域、无人机及运输物品价值等内容,制定碰撞概率的安全目标水平,进而确定最小安全放行间隔;
7、根据等效安全水平原则,无人机安全目标水平应至少不低于有人机的安全目标水平;参考民航领域,将安全目标水平定为10-7次事故/飞行小时。
8、s3:确定速度误差模型;
9、a.第一阶段为爬升阶段,无人机爬升速度受控制系统、爬升程序等多方面因素影响导致不稳定性;爬升阶段过程较短,假设一款特定型号无人机在该阶段的平均爬升速度服从均值为μclimb,方差为的正态分布,即其平均爬升速度vclimb满足:
10、
11、b.第二阶段为巡航加速阶段,该阶段用时和距离偏短,假定这一阶段无人机的加速度acruise_a稳定,仅将该阶段看作匀加速运动,作为前后两阶段的过渡阶段。
12、c.第三阶段为巡航匀速阶段,按照无人机巡航设计为匀速运行,假设该阶段的运行速度服从正态分布,即无人机在巡航匀速阶段的速度vcruise满足:
13、
14、在无人机实际飞行中,速度的不稳定性应是连续变化的,速度变化特征应满足:
15、|vcruise_m+1-vcruise_m|≤τamax,m=1,2,…… (3)
16、s4:确定碰撞模板;
17、参考原始reich模型碰撞盒,该碰撞风险模型主要基于航线系统、间隔向量、临近层、碰撞模板这四个概念,根据旋翼无人机每条旋翼轴长相等物理结构特点,以及飞行过程中的因颠簸等原因发生俯仰,选用圆球体作为碰撞模板;
18、假设无人机的机体高度为hdrone,旋翼轴长的两倍为ldrone,根据无人机机体特性,即可模拟出无人机机体的最小外接球,最小外接球的半径r为:
19、
20、当两架无人机的最小外接球发生接触或者重叠时,即视为两架无人机发生碰撞。假设无人机1和无人机2最小外接球半径分别为r1和r2,将两架无人机的最小外接球进行组合,得到一个半径为r1+r2的圆球体,将组合后的圆球体放置在某架无人机上,该圆球体即碰撞模板。
21、s5:同航线碰撞判定;
22、同航线中的碰撞形式主要为后机追赶上前机,无人机在爬升阶段和巡航阶段均存在速度不稳定性,因此同航线碰撞分为爬升阶段碰撞和巡航阶段碰撞;
23、a.爬升阶段碰撞分析;
24、假设在一次连续放行的两架无人机中,无人机1先放行,无人机2后放行,vclimb1、vclimb2分别为无人机1和无人机2在爬升阶段的平均速度且单位为m/s,则有:
25、
26、同航线两架无人机在爬升阶段产生追赶碰撞的判断结果cclimb为:
27、
28、b.巡航阶段碰撞分析;
29、假设先后放行两架无人机在爬升阶段没有碰撞,则当无人机1到达巡航阶段时,无人机2仍处在爬升阶段,所以需要继续爬升,无人机2爬升登顶剩余需要的时间tclimb_r2为:
30、
31、当无人机2在tclimb_r2时间内登顶时,要判断无人机1在该时间内是否达到了巡航目标速度vtarget1:
32、
33、如果tcruise_a1大于tclimb_r2,说明当无人机2爬升登顶时,无人机1仍处在巡航加速阶段,反之无人机1则进入巡航匀速阶段;之后需要分为两种情形进行讨论;
34、a.第一种情形为:无人机2登顶时,无人机1仍处在巡航加速阶段,此时无人机1在巡航阶段飞行的距离d1为:
35、
36、当无人机1达到巡航目标速度vtarget1时,可得:
37、
38、
39、当无人机2达到巡航目标速度vtarget2时,可得:
40、
41、
42、b.第二种情形为:无人机2登顶时,无人机1已进入巡航匀速阶段,此时无人机1在巡航阶段飞行的距离d1为:
43、
44、当无人机2达到巡航目标速度vtarget2时,两无人机在巡航阶段飞行的距离d1、d2分别为:
45、
46、
47、之后两架无人机都进行“匀速”运动,两无人机在巡航阶段飞行的距离d1、d2分别为:
48、
49、
50、无人机2在巡航匀速阶段的速度vcruise_j满足
51、针对同航线两架无人机在巡航阶段产生追赶碰撞的判断为:
52、
53、在巡航阶段,如果前机巡航结束时l-d2>r1+r2,其中l为巡航阶段总距离,则表明巡航阶段未产生追赶碰撞。
54、s6:交叉航路碰撞判定;
55、爬升阶段,两机无需考虑碰撞问题,碰撞只有在交叉点附近才会发生,因此交叉航线与同航线的飞行情形略有差异,分为两种情形:
56、a.第一种情形为无人机1先放行且先达到巡航阶段,此情形与同航线两机飞行情况基本一致,仅分属于不同航线,具体步骤如s5中公式(7)至(18)所示。
57、b.第二种情形为无人机2后放行但先达到巡航阶段,此时无人机1仍处在爬升阶段,需要继续爬升,假设无人机1爬升登顶剩余需要的时间为tclimb_r1,可得:
58、
59、当无人机1进入巡航阶段时,需要对无人机2所在阶段进行判定;
60、若tclimb_r1小于tcruise_a2时,无人机2处于巡航加速阶段,此时无人机2在巡航阶段飞行距离d2为:
61、
62、若tclimb_r1大于或等于tcruise_a2时,无人机2处于巡航匀速阶段,此时无人机2在巡航阶段飞行距离d2为:
63、
64、当无人机1达到巡航目标速度vtarget1时,无人机1在巡航阶段飞行的距离d1为:
65、
66、若tclimb_r1+tcruise_a1<tcruise_a2,无人机2的巡航飞行距离d2为:
67、
68、若tclimb_r1+tcruise_a1≥tcruise_a2,无人机2的巡航飞行距离d2为:
69、
70、由于交叉航线的碰撞判定是发生在交叉点附近才会发生,因此需要将交叉点单独进行研究分析;假设无人机1和无人机2起飞点距交叉点的水平距离分别为d1和d2,碰撞判定从无人机1在巡航阶段飞行d1-(r1+r2)时开始,到飞行d1+r1+r2时结束。判定过程中d1和d2仍表示两机在巡航阶段飞行的距离,碰撞模板平面圆与无人机2所在航线的交线长的一半为s1,可得:
71、
72、
73、作为本发明的优选技术方案,所述(3)式中,τ为速度变化周期,vcruise_m为前一时段速度,vcruise_m+1为后一时段速度,amax为最大变化加速度。
74、作为本发明的优选技术方案,以无人机1作为外接碰撞模板的无人机,碰撞模板的球心就是无人机1的质心,此时,另一架无人机可视为一个质点,本文称为无人机2,当该质点位于碰撞模板边缘或进入碰撞模板时,视为无人机1和2发生碰撞。
75、作为本发明的优选技术方案,所述(5)和(6)式中,tclimb_diff为前机爬升登顶时后机刚好接触碰撞模板的时间与前机登顶时间之差,单位为m;h为航线高度,即爬升阶段高度,单位为m;r1+r2为碰撞模板的半径,单位为m;两机放行间隔为t,单位为s。
76、作为本发明的优选技术方案,所述(7)和(8)式中:acruise_a1为无人机1在巡航加速阶段的加速度,单位为m/s-2;tcruise_a1为无人机1在巡航加速阶段所用的时间,单位为s。
77、作为本发明的优选技术方案,所述(9)、(10)、(11)、(12)和(13)式中,acruise_a2为无人机2在巡航加速阶段的加速度,单位为m/s-2;d1和d2分别为当无人机1达到vtarget1时,两机在巡航阶段飞行的距离,单位为m;tcruise_a2为无人机2在巡航加速阶段所用的时间,单位为s;无人机1在巡航匀速阶段的速度
78、作为本发明的优选技术方案,所述(21)式中,acruise_a2为无人机2在巡航加速阶段的加速度,单位为m/s-2;tcruise_a2为无人机2在巡航加速阶段所用的时间,单位为s。
79、本发明的有益效果是:该种基于速度误差的物流无人机安全放行间隔标定方法,针对同航线运行和交叉航线运行两种无人机运行放行管理场景,考虑无人机爬升和巡航阶段,基于速度不稳定性,建立了无人机碰撞风险评估模型,提供了一种放行间隔标定方法,降低了无人机飞行发生事故的概率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186339.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。