一种基于L4车辆的无人公交车站的预警方法、系统及介质与流程
- 国知局
- 2024-07-31 20:30:55
本发明涉及无人公交车,尤其是涉及一种基于l4车辆的无人公交车站的预警方法、系统及介质。
背景技术:
1、随着自动驾驶技术飞速发展,并且车辆系统复杂度较高。在常态化运营的思路下,车辆处于无人监管状态,停靠站点时会发因为其他交通参与者的出现发生很多未知问题。与传统汽车相比,l4车辆的无人公交没有人类驾驶员的直观感知判断能力。因此需要依赖先进的传感器和算法来实现安全靠站,为了保障无人监管下的车辆稳定运行,包涵感知、定位、规划、控制等软件模块并进行安全靠站。
2、现有技术中,现有无人公交安全站车协同控制系统,主要是依靠车身传感器和算法来进行监测,同时人为的进行观察周边道路状况,来对靠站进行综合评估,最后决策靠站的时间和地点,以此来保证无人公交的正常工作。只能实现半自动的停站、靠站、启动,基于此方案可以实现完整无人化的停站、靠站、启动。由于此现有的无人公交安全自动驾驶传感器系统,针对自车传感器感知交通参与者与其他交通参与者,在停靠站台的同时,对一下紧急的状态无法及时下达指令。无法对其他外部交通参与者(机动车、非机动车、行人)、公共交通参与者(自动驾驶公交、候车人)进行实时监测,通过自动驾驶技术做出最有利的决策。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于l4车辆的无人公交车站的预警方法、系统及介质,不仅能够对公交车站的运行状况进行实时监测,保证公交车的安全运营,而且能够精确地对公交车的进出站进行预警,提高车辆行驶的安全性,进一步提高乘客乘车的体验。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于l4车辆的无人公交车站的预警方法,所述方法包括:
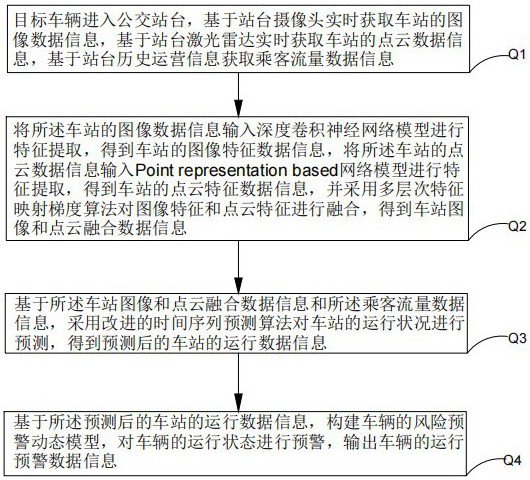
4、q1.目标车辆进入公交站台,基于站台摄像头实时获取车站的图像数据信息,基于站台激光雷达实时获取车站的点云数据信息,基于站台历史运营数据信息获取乘客流量数据信息;
5、q2.将所述车站的图像数据信息输入深度卷积神经网络模型进行特征提取,得到车站的图像特征数据信息,将所述车站的点云数据信息输入point representation based网络模型进行特征提取,得到车站的点云特征数据信息,并采用多层次特征映射梯度算法对图像特征和点云特征进行融合,得到车站图像和点云融合数据信息;
6、q3.基于所述车站图像和点云融合数据信息和所述乘客流量数据信息,采用改进的时间序列预测算法对车站的运行状况进行预测,得到预测后的车站的运行数据信息;
7、q4.基于所述预测后的车站的运行数据信息,构建车辆的风险预警动态模型,对车辆的运行状态进行预警,输出车辆的运行预警数据信息。
8、进一步的,在步骤q2中,所述将所述车站的图像数据信息输入深度卷积神经网络模型进行特征提取包括:
9、q211.获取所述车站的图像数据信息,输入深度卷积神经网络模型进行训练和学习,确定网络参数,得到训练好的深度卷积神经网络模型;
10、q212.基于所述训练好的深度卷积神经网络模型,输入待测车站图像数据信息,进行特征提取,得到车站的图像特征数据信息。
11、进一步的,所述point representation based网络模型的特征提取函数为f,
12、
13、
14、其中,x为车站的点云数据信息,f(x)为连续权重函数。
15、进一步的,在步骤q2中,所述采用多层次特征映射梯度算法对图像和点云特征进行融合包括:
16、q221.基于所述车站的图像特征数据信息和所述车站的点云特征数据信息,建立车站的多层次特征映射函数g(y,z),
17、
18、其中,y为车站的图像特征数据信息,z为车站的点云特征数据信息,α为特征映射因子,g(y,z)为特征转换函数,对车站的图像特征和点云特征进行映射,得到车站的多层次特征映射数据信息;
19、q222.基于所述车站的多层次特征映射数据信息,建立车站的图像和点云的特征梯度融合函数h,
20、
21、其中,v为梯度函数,h为车站的多层次特征映射数据信息;
22、q223.基于所述车站的图像和点云的特征梯度融合函数h,对图像特征和点云特征进行融合,得到车站图像和点云融合数据信息。
23、进一步的,所述特征转换函数g(y,z)为,
24、
25、其中,β1和β2为特征转换因子,y为车站的图像特征数据信息,z为车站的点云特征数据信息;
26、所述梯度函数v为,
27、
28、其中,h为车站的多层次特征映射数据信息,η为梯度常量参数。
29、进一步的,在步骤q3中,所述采用改进的时间序列预测算法对车站的运行状况进行预测包括:
30、q31.基于所述车站图像和点云融合数据信息和所述乘客流量数据信息,进行时间戳标定并进行对齐,得到时间戳标定后的车站图像和点云融合数据信息和时间戳标定后的乘客流量数据信息;
31、q32.基于所述时间戳标定后的乘客流量数据信息和所述时间戳标定后的车站图像和点云融合数据信息,建立车站的时间序列预测函数u,
32、
33、其中,at为时间戳标定后的乘客流量数据信息,bt为时间戳标定后的车站图像和点云融合数据信息,θ1和θ2为车站运行状况预测分析常量因子;
34、q33.基于所述车站的时间序列预测函数u,对车站的运行状况进行预测,得到预测后的车站的运行数据信息。
35、进一步的,所述车站运行状况预测分析常量因子θ1和θ2的约束条件为,
36、
37、进一步的,在步骤q4中,所述构建车辆的风险预警动态模型,对车辆的运行状态进行预警为根据所述预测后的车站的运行数据信息,构建车辆风险预警函数w,
38、
39、其中,r为预测后的车站的运行数据信息,σ1和σ2为车站的风险预警因子。
40、为了实现上述目的及其他相关目的,本发明还提供了一种基于l4车辆的无人公交车站的预警系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的基于l4车辆的无人公交车站的预警方法的步骤。
41、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于l4车辆的无人公交车站的预警方法的计算机程序。
42、本发明具有以下积极效果:
43、1.本发明通过将车站的图像数据信息输入深度卷积神经网络模型进行特征提取,得到车站的图像特征数据信息,将车站的点云数据信息输入point representation based网络模型进行特征提取,得到车站的点云特征数据信息,并采用多层次特征映射梯度算法对图像特征和点云特征进行融合,不仅能够从多个层次对车站的图像和点云信息进行融合,提高了识别精度,而且能够改善激光雷达扫描得到点云不均匀分布的问题。
44、2.本发明通过采用改进的时间序列预测算法对车站的运行状况进行预测,并结合构建车辆的风险预警动态模型,对车辆的运行状态进行预警,不仅能够对公交车站的运行状况进行实时监测,保证公交车的安全运营,而且能够精确地对公交车的进出站进行预警,提高车辆行驶的安全性,进一步提高乘客乘车的体验。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186591.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表