一种基于视觉感应的斑马线行人安全控制方法及装置与流程
- 国知局
- 2024-07-31 20:32:01
本发明涉及智能预警,特别是指一种基于视觉感应的斑马线行人安全控制方法及装置。
背景技术:
1、近年来,随着智能交通系统的发展,基于视觉感应和雷达监测的技术越来越多的被应用到交通管理中。这些技术能够提供实时的交通流数据,包括车辆和行人的位置、速度和加速度等信息。
2、然而,现有的智能交通系统在复杂的交通环境中,可能存在风险评估和预警机制不足的问题,例如,它们有的不能够实时监测行人与车辆之间的交互,因此不能够准确的计算行人与车辆之间的交互风险,因此,在潜在的危险情况下,可能无法提供及时的预警或采取必要的预防措施。
技术实现思路
1、本发明要解决的技术问题是提供一种基于视觉感应的斑马线行人安全控制方法及装置,可以计算行人与车辆之间的交互风险因子,使得能够在潜在危险发生前进行预警和干预。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种基于视觉感应的斑马线行人安全控制方法,所述方法包括:
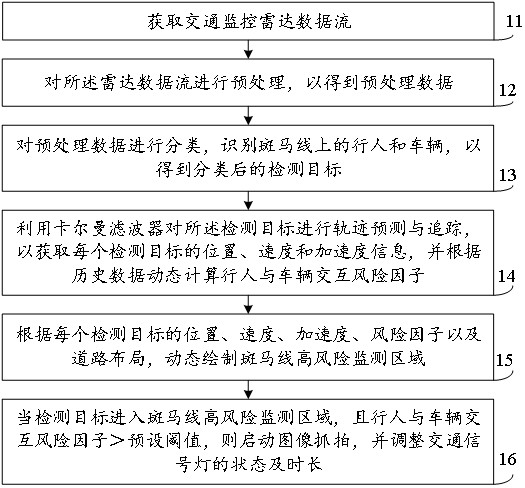
4、获取交通监控雷达数据流;
5、对所述雷达数据流进行预处理,以得到预处理数据;
6、对预处理数据进行分类,识别斑马线上的行人和车辆,以得到分类后的检测目标;
7、利用卡尔曼滤波器对所述检测目标进行轨迹预测与追踪,以获取每个检测目标的位置、速度和加速度信息,并根据历史数据动态计算行人与车辆交互风险因子;
8、根据每个检测目标的位置、速度、加速度、风险因子以及道路布局,动态绘制斑马线高风险监测区域;
9、当检测目标进入斑马线高风险监测区域,且行人与车辆交互风险因子>预设阈值,则启动图像抓拍,并调整交通信号灯的状态及时长。
10、进一步的,利用卡尔曼滤波器对所述检测目标进行轨迹预测与追踪,以获取每个检测目标的位置、速度和加速度信息,包括:
11、初始化卡尔曼滤波器参数,包括设定初始状态向量、设定初始状态协方差矩阵、设定过程噪声协方差矩阵和设定测量噪声协方差矩阵;
12、根据初始化的卡尔曼滤波器参数,使用状态转移方程预测目标在当前时刻的状态,以及更新初始状态协方差矩阵,以得到第一状态协方差矩阵;
13、当通过雷达检测到的目标位置时,将目标位置与预测的当前时刻的状态进行融合,使用卡尔曼增益计算预测的当前时刻的状态和测量数据的加权平均值,以得到当前时刻的最终状态;
14、当得到当前时刻的最终状态后,更新卡尔曼滤波器的状态向量,以反映目标当前的实际状态,以及更新状态协方差矩阵;
15、不断重复操作,利用每次获得的新的测量数据更新卡尔曼滤波器的状态,通过连续的状态更新,以追踪目标的轨迹,包括目标的位置、速度和加速度信息。
16、进一步的,根据历史数据动态计算行人与车辆交互风险因子,包括:
17、通过计算行人与车辆交互风险因子 r,其中,,,,,,和是权重系数, d是行人与车辆之间的直线距离, v rel是行人与车辆的相对速度, a rel是行人与车辆的相对加速度,和分别是相对速度和相对加速度的最大值, i是交通规则与道路布局的影响因子, e是环境因素, t是时间因素, b是行为模式因素,是权重参数,是逻辑函数,将逻辑回归的线性组合映射为一个介于0和1之间的概率值,、、和是逻辑回归模型的参数,、和是输入的特征集, p、 q和 r分别是用于调整距离、相对速度和相对加速度影响的非线性指数, n表示输入特征的数量。
18、进一步的,根据每个检测目标的位置、速度、加速度、风险因子以及道路布局,动态绘制斑马线高风险监测区域,包括:
19、通过确定斑马线的长度;通过确定斑马线的宽度,其中,和分别是斑马线的长度和宽度,和分别是斑马线的基础长度和宽度,k1,k2,k3和k4是调整系数,是道路的坡度,是道路的曲率半径,,,,,和是调整系数,是当前的交通流量,是道路设计的最大交通流量,是车辆密度,是天气条件的量化值;
20、根据斑马线长度和斑马线宽度,通过计算高风险区域,其中,是制动距离,是车辆的平均速度,是高风险区域距离,是安全系数,是车道的有效宽度,,,和是调整系数,是一个调整因子, d p表示检测目标到斑马线的最短距离, v是检测目标的速度, v max表示道路上允许的最大速度,是检测目标的加速度,是设定的最大加速度值, r是行人与车辆交互风险因子,,,,,和是调整系数;
21、根据交通流量、车辆密度和天气条件,计算综合风险指数;
22、根据所述综合风险指数,动态调整斑马线高风险监测区域。
23、进一步的,根据交通流量、车辆密度和天气条件,计算综合风险指数,包括:
24、通过计算综合风险指数,其中,是综合风险指数,,和是权重系数,,和是指数参数。
25、进一步的,根据所述综合风险指数,动态调整斑马线高风险监测区域,包括:
26、设定两个阈值和,以及一个对应的调整系数范围 e min和 e max,其中, e min<1< e max;
27、当时,表示交通状况安全,缩小斑马线高风险监测区域,则将调整因子设置为 e min;
28、当时,表示交通状况有风险,扩大斑马线高风险监测区域,则调整因子设置为 e max;
29、当时,则调整因子设置为 e min和 e max之间的插值 e n。
30、进一步的,所述插值 e n的计算公式为:
31、;
32、其中, k是一个正的控制参数。
33、第二方面,一种基于视觉感应的斑马线行人安全控制装置,包括:
34、获取模块,用于获取交通监控雷达数据流;对所述雷达数据流进行预处理,以得到预处理数据;对预处理数据进行分类,识别斑马线上的行人和车辆,以得到分类后的检测目标;
35、处理模块,用于利用卡尔曼滤波器对所述检测目标进行轨迹预测与追踪,以获取每个检测目标的位置、速度和加速度信息,并根据历史数据动态计算行人与车辆交互风险因子;根据每个检测目标的位置、速度、加速度、风险因子以及道路布局,动态绘制斑马线高风险监测区域;当检测目标进入斑马线高风险监测区域,且行人与车辆交互风险因子>预设阈值,则启动图像抓拍,并调整交通信号灯的状态及时长。
36、第三方面,一种计算设备,包括:
37、一个或多个处理器;
38、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现所述的方法。
39、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现所述的方法。
40、本发明的上述方案至少包括以下有益效果:
41、通过实时获取交通监控雷达数据流,并对其进行预处理和关键移动目标的提取,本发明能够准确且迅速地识别斑马线上的行人和车辆。
42、利用卡尔曼滤波器对检测目标进行轨迹预测与追踪,结合历史数据动态计算行人与车辆交互风险因子,使得系统能够在潜在危险发生前进行预警和干预。
43、根据每个检测目标的位置、速度、加速度、风险因子以及道路布局,动态绘制斑马线高风险监测区域,并根据实时监测数据调整交通信号灯的状态及时长,这种灵活性和自适应性使得本发明能够更好地适应复杂的交通环境。
44、当检测目标进入高风险监测区域,且风险因子超过预设阈值时,系统启动图像抓拍并调整交通信号灯,这有助于及时提醒驾驶员和行人注意交通安全,从而有效降低交通事故的发生率,提升行人过马路的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186713.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表