一种基于汽车导航控制转向灯的方法及系统与流程
- 国知局
- 2024-07-31 20:31:53
本发明属于自动出行,尤其涉及一种基于汽车导航控制转向灯的方法及系统。
背景技术:
1、自动出行技术与辅助系统已被广泛应用于现代汽车中,为出行者提供安全和便利。这些系统的高效运作离不开先进的传感器技术,面向未来,5g和车联网技术的进一步发展预示着一个更加智能、更加互联的交通生态系统。这不仅将为出行者和乘客带来更高水平的安全和舒适性,也代表着对城市交通管理和环境保护的重大贡献。随着软件定义车辆的兴起,车辆功能和性能的更新将更加灵活和高效,进一步加速智能交通系统的发展。总的来说,我们正在迈入一个由先进技术驱动、更加安全、高效和环保的交通新时代。
2、目前在自动出行汽车在驱驰过程中的自主导航和决策能力还存在提升空间,以及如何在车辆群体中实现协调一致的动作,以提高驱驰效率和安全性还需要进一步发展。智能交通出行通常是针对一辆车,在许多场景中需要多辆车协同协作,这就需要更复杂的智能出行系统。
技术实现思路
1、本发明的目的在于提供一种基于汽车导航控制转向灯方法,旨在解决背景技术中确定的现有技术存在的技术问题。
2、本发明是这样实现的,一种基于汽车导航控制转向灯方法,所述方法包括:
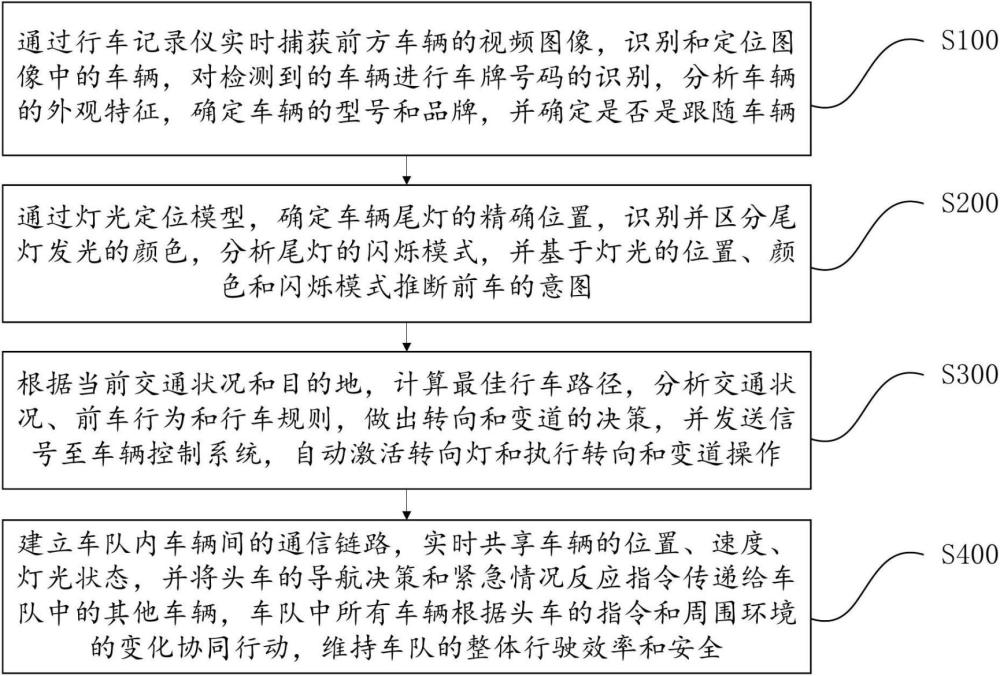
3、通过行车记录仪实时捕获前方车辆的视频图像,识别和定位图像中的车辆,对检测到的车辆进行车牌号码的识别,分析车辆的外观特征,确定车辆的型号和品牌,并确定是否是跟随车辆;
4、通过灯光定位模型,确定车辆尾灯的精确位置,识别并区分尾灯发光的颜色,分析尾灯的闪烁模式,并基于灯光的位置、颜色和闪烁模式推断前车的意图;
5、根据当前交通状况和目的地,计算最佳行车路径,分析交通状况、前车行为和行车规则,做出转向和变道的决策,并发送信号至车辆控制系统,自动激活转向灯和执行转向和变道操作;
6、建立车辆队伍内车辆间的通信链路,实时共享车辆的位置、速度、灯光状态,并将头车的导航决策和紧急情况反应指令传递给车辆队伍中的其他车辆,车辆队伍中所有车辆根据头车的指令和周围环境的变化协同行动,维持车辆队伍的整体驱驰效率和安全。
7、作为本发明更进一步的方案,所述通过行车记录仪实时捕获前方车辆的视频图像,具体包括:
8、摄像头校准与视频捕获,连续捕获前方视频流,进行实时分析,并定位图像中的车辆和车牌区域,提取车牌上的文字信息;
9、已定位的车辆图像,提取用于车型识别的关键特征,识别车辆的型号和品牌,将车牌识别和车型识别的信息综合起来,提供检测到的车辆的全面视图。
10、作为本发明更进一步的方案,所述通过灯光定位模型,确定车辆尾灯的精确位置,识别并区分尾灯发光的颜色,分析尾灯的闪烁模式,具体包括:
11、通过尾灯检测模型,来识别图像中尾灯区域,并对尾灯区域进行颜色分割,以区分不同的灯光颜色;
12、从连续的视频帧中提取灯光的亮度变化信号,并将识别的闪烁模式分类为持续亮起、缓慢闪烁、快速闪烁,这些不同的模式对应不同的出行行为;
13、结合尾灯位置、颜色和闪烁模式的信息,基于已识别的灯光信号,利用预设的尾灯检测模型来推断前车的可能行为,并根据周围的交通状况和环境因素,进行调整。
14、作为本发明更进一步的方案,所述根据当前交通状况和目的地,计算最佳行车路径,分析交通状况、前车行为和行车规则,做出转向和变道的决策,并发送信号至车辆控制系统,自动激活转向灯和执行转向和变道操作,具体包括:
15、通过车辆当前位置,结合目的地信息,通过地图服务计算出最佳驱驰路径,并考虑实时交通信息,调整规划路径;
16、通过预测交通流和前车行为,根据预测结果、交通规则和出行策略制定转向和变道决策;
17、将决策转换为具体的控制指令,发送控制指令至车辆动态控制系统,设定转向角度、激活转向灯,并监控执行过程,根据实时反馈进行调整。
18、作为本发明更进一步的方案,所述车辆队伍中所有车辆根据头车的指令和周围环境的变化协同行动,维持车辆队伍的整体驱驰效率和安全,具体包括:
19、识别并验证车辆队伍中的其他车辆,建立安全的通信链路,同步路况信息和交通通知,并实时收集发送车辆的动态数据,接收来自车辆队伍内其他车辆的类似数据,进行时间戳对齐;
20、分析车辆队伍内部的数据,制定车辆队伍驱驰策略,在紧急情况下,协调车辆队伍内各车辆的避险策略;
21、将协调后的决策转换为具体的控制指令,发送给车辆动态控制系统,监控车辆队伍成员的行动执行状况,在执行过程中实时调整指令;
22、实时监控车辆队伍中的异常事件,快速响应异常,制定应急措施并在车辆队伍中传达,记录异常事件。
23、本发明的另一目的在于提供一种基于汽车导航控制转向灯系统,所述系统包括:
24、车辆检测与识别模块,用于通过行车记录仪实时捕获前方车辆的视频图像,识别和定位图像中的车辆,对检测到的车辆进行车牌号码的识别,分析车辆的外观特征,确定车辆的型号和品牌,并确定是否是跟随车辆;
25、灯光识别与解释模块,用于通过灯光定位模型,确定车辆尾灯的精确位置,识别并区分尾灯发光的颜色,分析尾灯的闪烁模式,并基于灯光的位置、颜色和闪烁模式推断前车的意图;
26、导航与决策控制模块,用于根据当前交通状况和目的地,计算最佳行车路径,分析交通状况、前车行为和行车规则,做出转向和变道的决策,并发送信号至车辆控制系统,自动激活转向灯和执行转向和变道操作;
27、通信与协调模块,用于建立车辆队伍内车辆间的通信链路,实时共享车辆的位置、速度、灯光状态,并将头车的导航决策和紧急情况反应指令传递给车辆队伍中的其他车辆,车辆队伍中所有车辆根据头车的指令和周围环境的变化协同行动,维持车辆队伍的整体驱驰效率和安全。
28、作为本发明更进一步的方案,所述车辆检测与识别模块,具体包括:
29、车辆及车牌检测单元,用于摄像头校准与视频捕获,连续捕获前方视频流,进行实时分析,并定位图像中的车辆和车牌区域,提取车牌上的文字信息;
30、车型及特征识别单元,用于已定位的车辆图像,提取用于车型识别的关键特征,识别车辆的型号和品牌,将车牌识别和车型识别的信息综合起来,提供检测到的车辆的全面视图。
31、作为本发明更进一步的方案,所述灯光识别与解释模块,具体包括:
32、灯光定位与颜色识别单元,用于通过尾灯检测模型,来识别图像中尾灯区域,并对尾灯区域进行颜色分割,以区分不同的灯光颜色;
33、闪烁模式分析单元,用于从连续的视频帧中提取灯光的亮度变化信号,并将识别的闪烁模式分类为持续亮起、缓慢闪烁、快速闪烁,这些不同的模式对应不同的出行行为;
34、意图解释单元,用于结合尾灯位置、颜色和闪烁模式的信息,基于已识别的灯光信号,利用预设的尾灯检测模型来推断前车的可能行为,并根据周围的交通状况和环境因素,进行调整。
35、作为本发明更进一步的方案,所述导航与决策控制模块,具体包括:
36、路径规划单元,用于通过车辆当前位置,结合目的地信息,通过地图服务计算出最佳驱驰路径,并考虑实时交通信息,调整规划路径;
37、决策制定单元,用于通过预测交通流和前车行为,根据预测结果、交通规则和出行策略制定转向和变道决策;
38、执行指令单元,用于将决策转换为具体的控制指令,发送控制指令至车辆动态控制系统,设定转向角度、激活转向灯,并监控执行过程,根据实时反馈进行调整。
39、作为本发明更进一步的方案,所述通信与协调模块,具体包括:
40、通信建立与数据同步单元,用于识别并验证车辆队伍中的其他车辆,建立安全的通信链路,同步路况信息和交通通知,并实时收集发送车辆的动态数据,接收来自车辆队伍内其他车辆的类似数据,进行时间戳对齐;
41、协调决策单元,用于分析车辆队伍内部的数据,制定车辆队伍驱驰策略,在紧急情况下,协调车辆队伍内各车辆的避险策略;
42、行动执行单元,用于将协调后的决策转换为具体的控制指令,发送给车辆动态控制系统,监控车辆队伍成员的行动执行状况,在执行过程中实时调整指令;
43、异常处理单元,用于实时监控车辆队伍中的异常事件,快速响应异常,制定应急措施并在车辆队伍中传达,记录异常事件。
44、本发明的有益效果是:本发明提升了自动出行汽车在多变交通环境中的感知能力,使得自动车辆能够更准确地理解周围环境,如识别交通信号、障碍物以及行人,从而做出更为精确和迅速的导航决策。尤其在车辆群体协作方面,本发明的独特之处在于它能够通过车与车之间的通信系统实现信息的即时共享,保证车辆在相互协作时能够同步它们的行动,从而避免碰撞,确保流畅的车流和提高整体道路的通行能力。并且设计了复杂的智能出行系统,完成在许多场景中需要多辆车协同协作运行的复杂交通设计。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186701.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表