一种电动自行车道路环境危险识别判断与提醒方法
- 国知局
- 2024-07-31 20:37:33
本发明涉及交通安全风险判断,具体是一种电动自行车道路环境危险识别判断与提醒方法。
背景技术:
1、在为市民生活带来便利的同时,电动自行车引发的交通事故也呈快速上升趋势。其中一个重要原因是在骑行环境中的危险不能及时被发现与躲避,这对骑行者和其他交通参与者构成了潜在威胁。因此,提高电动自行车的交通安全性成为当前亟待解决的问题。
2、在骑行环境中,危险源主要集中在前方和后方。前方危险主要包括道路障碍物、变道车辆、行人等,而后方危险涉及追尾风险、超车冲突等。当前,许多骑行者仅依赖视觉感知来应对这些危险,并且也不能完全注意到所有的潜在危险,而这在某些情况下并不足以确保安全。
3、因此,为了有效预防和减少电动自行车引发的交通事故,亟需一种电动自行车路环境危险识别判断与提醒方法。该方法实时监测骑行环境中的各种危险,能够及时发现前方和后方的潜在危险,并向骑行者提供即时的警示和建议,帮助其做出安全的决策。
技术实现思路
1、为了弥补现有技术问题的不足,本发明的目的在于一种电动自行车道路环境危险识别判断与提醒方法,通过决策树模型将骑行环境中的所要面对的诸多危险因素识别并量化为危险等级,并将危险利用车仪表上显示出来,提醒骑得者,使其能够快速做出应对,增加了在骑行过程中的安全程度。
2、为实现上述目的,本发明提供如下技术方案:
3、一种电动自行车道路环境危险识别判断与提醒方法,包括以下步骤:
4、(1)风险因素的信息采集
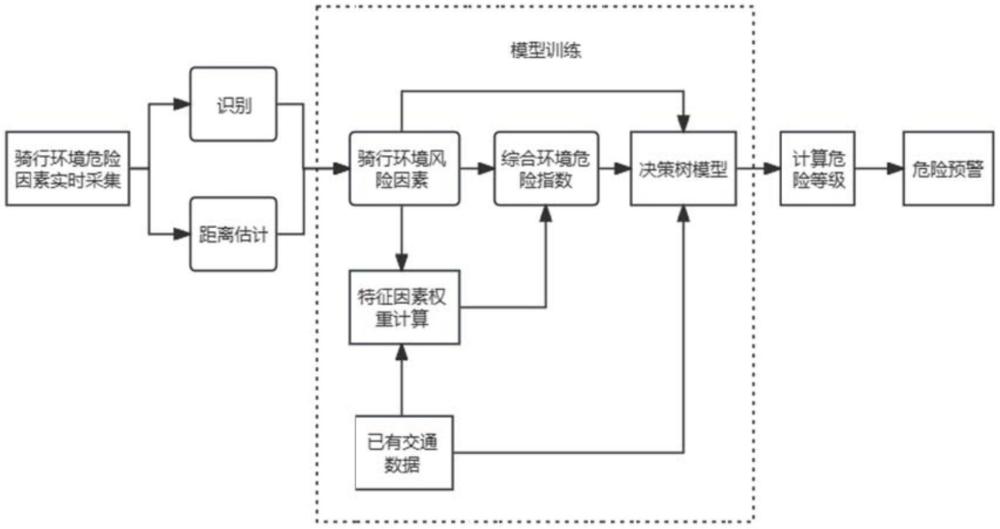
5、利用摄像头获取电动自行车前、后方危险区域的图像,利用图像识别技术从图像中识别出造成电动自行车危险的风险因素,并提取这些风险因素数据;
6、(2)构建用于划分危险等级的决策树模型
7、识别各风险因素的相对重要性,采用critic权重法确定每个所述风险因素指标变量对应的权重值,得到综合环境危险指数r,根据综合环境危险指数r划分风险等级;获取电动自行车交通事故相关风险因素历史数据,建立样本数据集对决策树模型进行训练;
8、(3)危险等级的识别与提醒
9、将步骤(1)风险因素数据作为自变量输入到训练好的决策树模型,得到骑行环境实时的危险等级,在仪表盘上显示危险等级提醒骑行人。
10、本发明中危险采集区域包括前方区域和后方区域,具体区域以后方区域为例:以骑行方向为中线,以25米为半径,左边界线与中线的夹角为80度,右边界线与中线的夹角为80度的扇形区域。
11、本发明中风险因素包括交通参与者、机动车、非机动车辆、道路状况、环境。
12、本发明中风险因素包括交通参与者、机动车、非机动车辆、道路状况、环境。
13、其中各风险因素数据包括:
14、交通参与者:是否转头,行人的速度以及其与电动自行车之间的距离;
15、机动车辆、非机动车:速度、加速度、横向位移及与电动自行车之间的距离;
16、道路状况:道路宽度、路面平整度;
17、环境:电动自行车距离障碍物、道路护栏、管理设施之间的距离,交通量。
18、本发明中风险因素与该车辆之间的距离计算,具体如下:
19、(1.1)确定相机内参矩阵:在进行距离估计之前,在相机标定过程中获得相机的内参矩阵;
20、(1.2)获取目标在图像中的位置:从模型中获得的目标在图像中的位置;
21、(1.3)归一化图像坐标:将像素坐标归一化,即将其除以图像的宽度和高度,得到范围在[0,1]之间的值;
22、(1.4)反投影到相机坐标系:使用相机内参矩阵将归一化坐标反投影到相机坐标系中,得到相机坐标系下的坐标;
23、(1.5)相机坐标系到世界坐标系的转换:在世界坐标系中获取目标的位置,还需要考虑相机的位置和朝向,这通常需要使用外参矩阵,包括相机在世界坐标系中的位置和朝向;
24、(1.6)从世界坐标系到实际距离:使用几何或三角测量的方法,根据世界坐标系中的位置估计目标到相机的距离。
25、车仪表上设有环形提醒标识,环形提醒标识按运动方向划分成正前方、左前方、右前方、正后方、左后方、右后方六个区域,每个区域均安装有各自亮起彩色灯带,各用于提醒危险因素所处位置。
26、本发明决策树模型根据综合环境危险指数r将危险划分为低、中、高三个等级,针对于不同危险等级进行相应提醒,具体如下:
27、低危险等级:对应位置仪表盘边缘位置黄色常亮;
28、中等危险等级:对应仪表盘边缘位置红色常亮;
29、高危险等级:对应仪表盘边缘位置红色闪烁,并伴随着鸣笛声。
30、与现有技术相比,本发明的有益效果是:
31、1、本发明中将骑行环境中的所要面对的诸多危险因素识别并量化为危险等级,以此给予对应的提示,增加了在骑行过程中的安全程度。
32、2、本发明通过获取电动自行车交通事故相关风险因素历史数据,建立样本数据集对决策树模型进行训练,提高对危险识别的准确性。
33、3、本发明车仪表上设有环形提醒标识按运动方向划分成正前方、左前方、右前方、正后方、左后方、右后方,各用于提醒危险因素所处位置,可以直观地表达风险位置,且根据提醒灯的颜色以及鸣笛声可直接判断出危险程度,快速做出应对。
技术特征:1.一种电动自行车道路环境危险识别判断与提醒方法,其特征在于,包括以下步骤:
2.根据权利要求1所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,
3.根据权利要求1所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,所述风险因素包括交通参与者、机动车、非机动车辆、道路状况、环境。
4.根据权利要求3所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,所述相关风险因素数据包括:
5.根据权利要求1所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,风险因素与该车辆之间的距离计算,具体如下:
6.根据权利要求1所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,车仪表上设有环形提醒标识,环形提醒标识按运动方向划分成正前方、左前方、右前方、正后方、左后方、右后方六个区域,每个区域均安装有各自亮起彩色灯带,用于提醒危险因素所处位置。
7.根据权利要求6所述电动自行车道路环境危险识别判断与提醒方法,其特征在于,所述决策树模型根据综合环境危险指数r将危险划分为低、中、高三个等级,针对于不同危险等级进行相应提醒,具体如下:
技术总结本发明公开了一种电动自行车道路环境危险识别判断与提醒方法,涉及交通安全风险判断技术领域,包括利用摄像头获取电动自行车前、后方危险区域的图像,提取相关数据;构建用于划分危险等级的决策树模型并进行训练;利用决策树模型得到骑行环境实时的危险等级,在仪表盘上显示危险等级提醒骑行人,将骑行环境中的所要面对的诸多危险因素识别并量化为危险等级,以此给予对应的提示,增加了在骑行过程中的安全程度。技术研发人员:姜康,刘世腾,于振华,冯忠祥,黄志鹏,祝振雄受保护的技术使用者:合肥工业大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240731/187156.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。